
Metodi e condizioni di misurazione
La distanza di arresto è l'angolo percorso dal momento in cui viene generato un segnale di arresto al momento in cui viene eseguito l'arresto del manipolatore.
Il tempo di arresto è il tempo che intercorre tra il momento in cui viene generato un segnale di arresto e il momento in cui viene eseguito l'arresto del manipolatore.
I dati relativi alla distanza di arresto e al tempo di arresto sono forniti per il giunto 1, il giunto 2 e il giunto 3, che hanno grandi distanze di marcia.
Il movimento di un asse sovrapposto può causare una distanza di arresto più lunga.
I dati relativi alla distanza di arresto e al tempo di arresto sono definiti in conformità alla dichiarazione e certificazione KS B ISO 10218-1:2011.
Categoria di arresto
Categoria di arresto | Descrizione | |
|---|---|---|
| 1 | Categoria di arresto 0 | La distanza di arresto e il tempo di arresto del giunto 1 (base), del giunto 2 (spallamento) e del giunto 3 (gomito) vengono misurati alla velocità massima, al livello di stiramento e al carico. Gli assi del giunto 2 e del giunto 3 sono paralleli l'uno all'altro, pertanto un impatto causato da un arresto forzato su una parte può causare uno slittamento sull'altro lato. Viene misurata anche la deviazione angolare. |
| 2 | Categoria di arresto 1 | La distanza di arresto e il tempo di arresto del giunto 1 (base) e del giunto 2 (spallamento) sono misurati rispettivamente al 33%, al 66% e al 100% della velocità massima, del livello di stiramento e del carico. La distanza di arresto e il tempo di arresto del giunto 3 (gomito) vengono misurati al 33%, 66% e 100% della velocità e del carico massimi. Il livello di allungamento durante la misurazione del giunto 3 è bloccato al massimo a causa della lunghezza del braccio inferiore e del polso completamente piatto. |
Posizioni e condizioni di misurazione
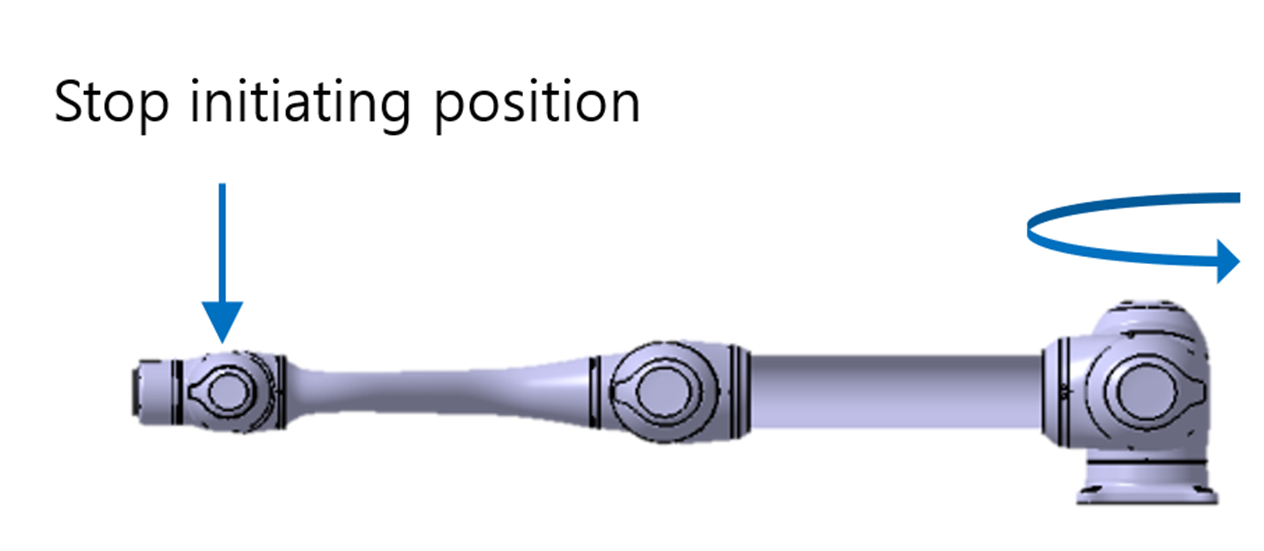
La misurazione del giunto 1 viene eseguita con l'asse di rotazione perpendicolare al suolo e durante il movimento orizzontale.
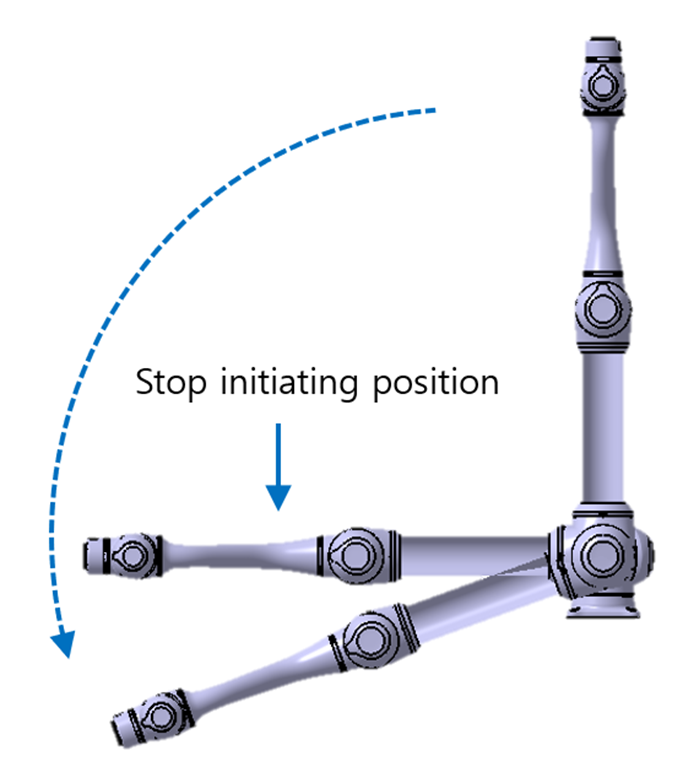
Le misurazioni del giunto 2 e del giunto 3 vengono eseguite con l'asse di rotazione parallelo al suolo e quando il robot viene arrestato con un movimento verso il basso verticale rispetto al suolo.
Nota
Le misurazioni sono il risultato del caso peggiore. La misurazione può variare a seconda delle circostanze
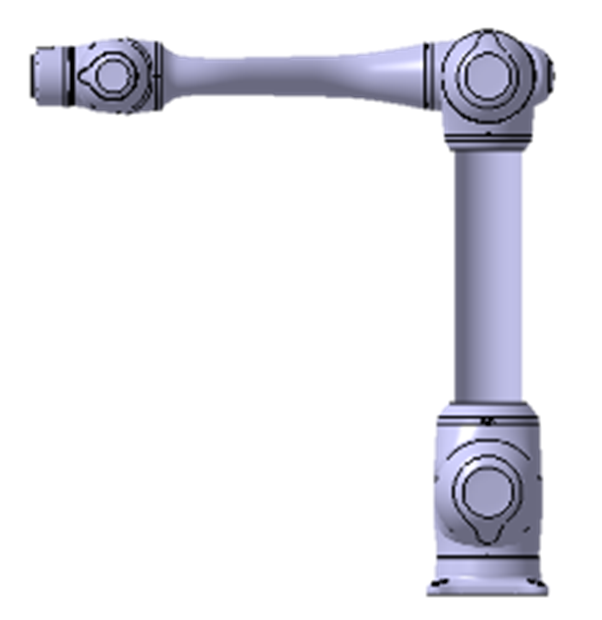
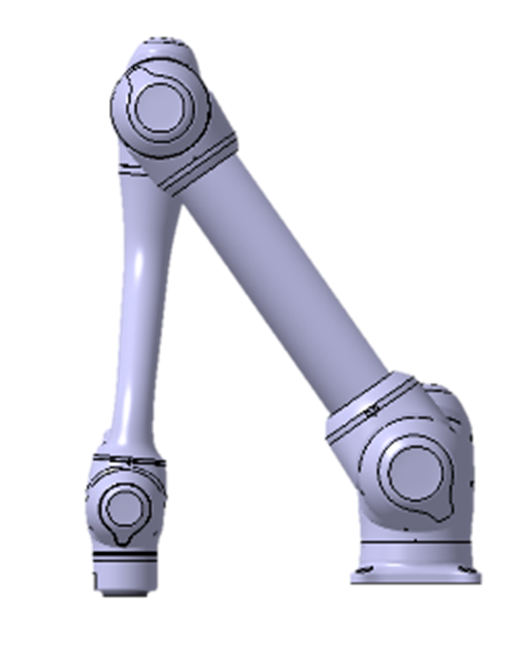
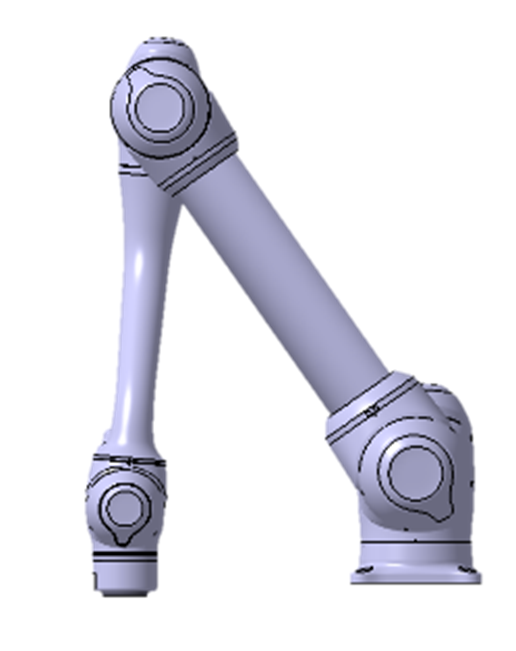
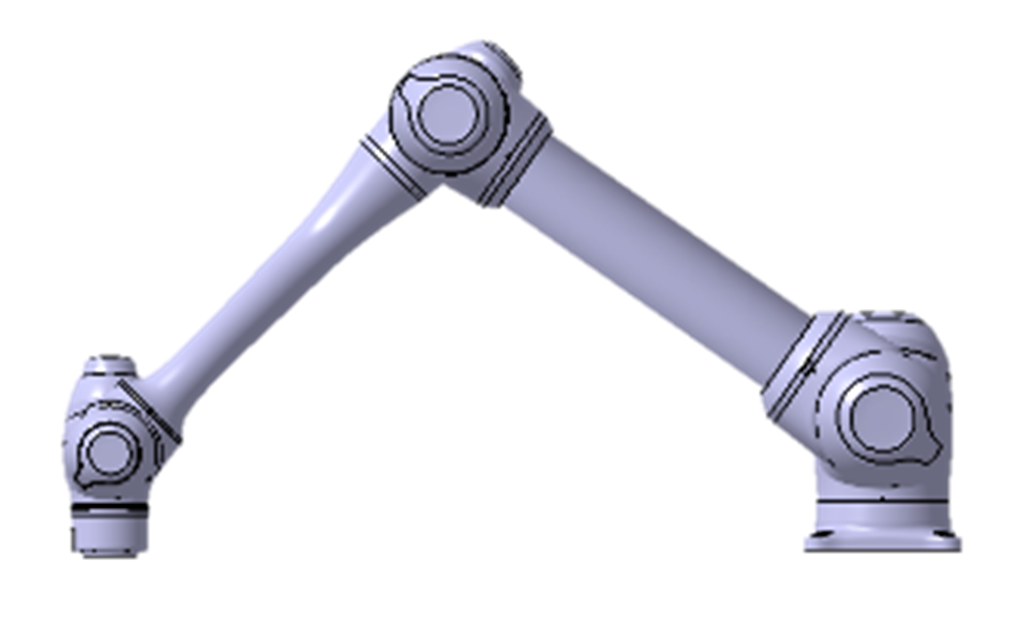
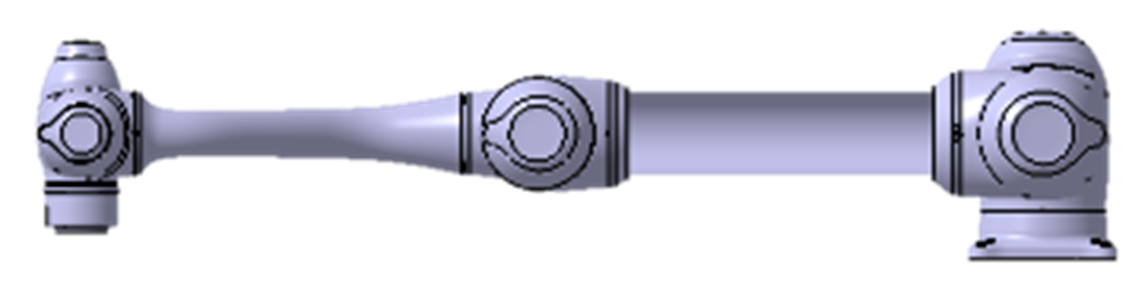
La posa per il 33%, il 66% e il 100% dell'estensione
| Giunto 1 | Giunto 2 | Giunto 3 |
estensione del 100% Categoria di arresto 0 |
 |
 |
 |
estensione del 33% Categoria di arresto 1 |
 |
 |
- |
estensione del 66% Categoria di arresto 1 |
 |
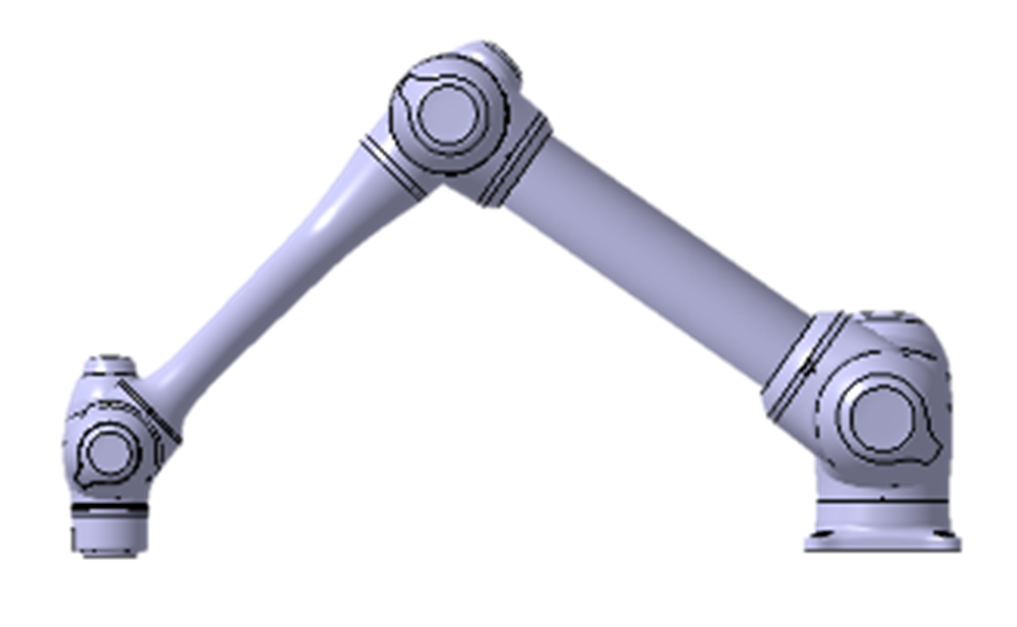 |
- |
estensione del 100% Categoria di arresto 1 |
 |
 |
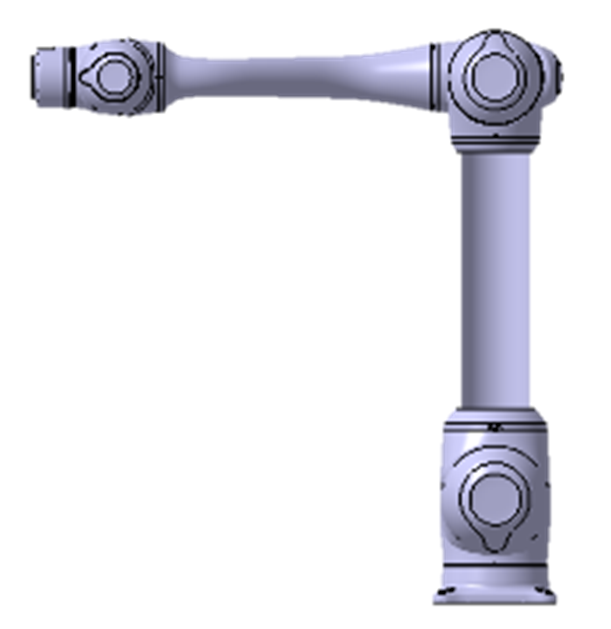 |
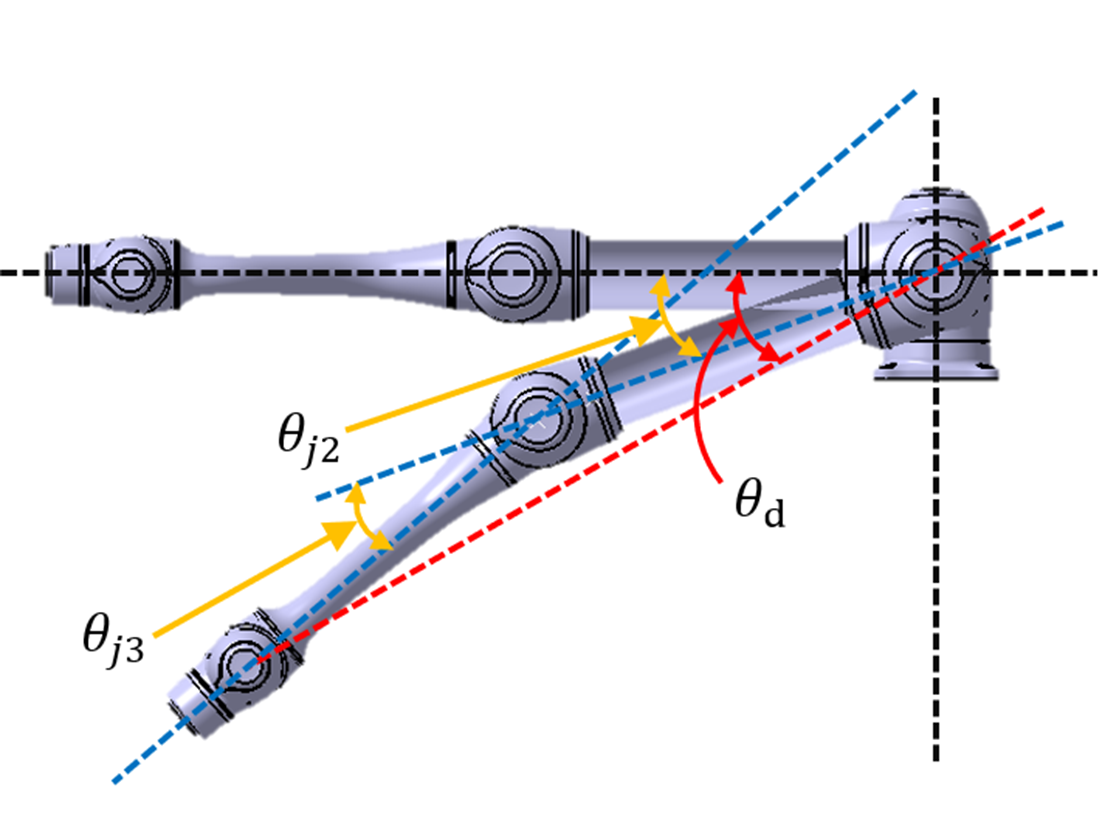
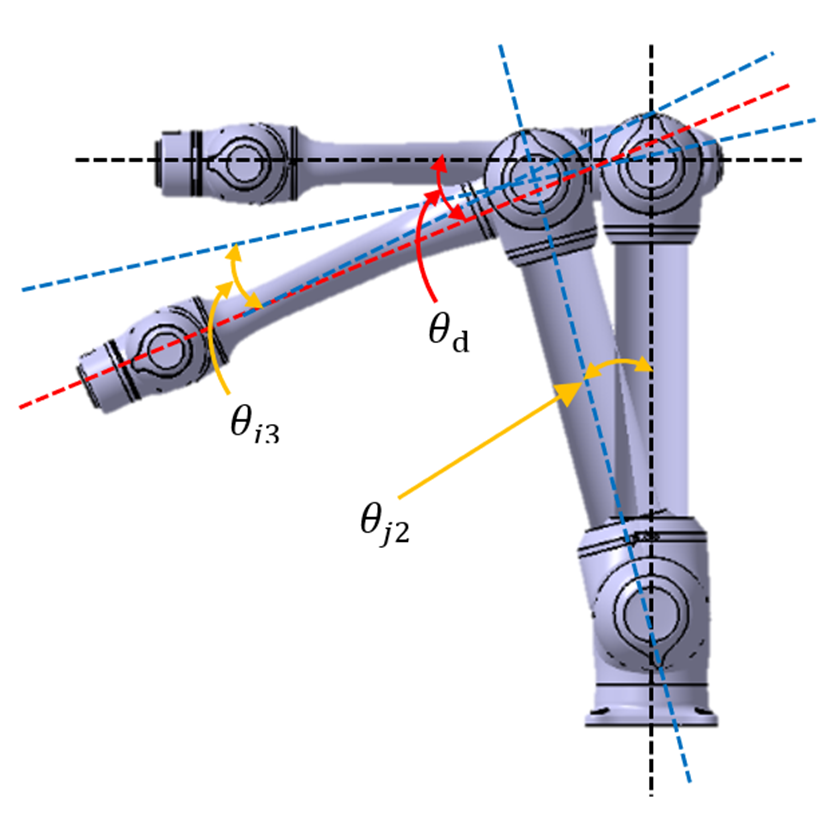
La posa all'inizio dell'arresto e l'angolo misurato (θd)
Posa quando viene avviato l'arresto | Angolo misurato | |
Joint1 |
 | Nessuno slittamento,
|
Joint2 |
 |
 |
Joint3 |
 |
 |