Collegamento di dispositivi esterni
Collegamento di dispositivi esterni - sensore di visione
Il robot può essere collegato a un sensore di visione (telecamera 2D per la misurazione della posizione dell'oggetto) e le misurazioni del sensore di visione possono essere trasferite al robot attraverso una rete per collegarsi ai comandi del robot.
Impostazione del sensore di visione
Impostazione della connessione di comunicazione
Collegare le porte LAN dei dispositivi e applicare la comunicazione TCP/IP per trasferire le misurazioni del sensore di visione al robot. (Fare riferimento a connessione di rete) impostare l'indirizzo IP del sensore di visione sulla banda TCP/IP 192.168.137.xxx per consentire la comunicazione TCP/IP.
Impostazione del lavoro di visione
Per eseguire la misurazione della posizione dell'oggetto, è necessario disporre di un input di immagine e di un apprendimento della visione dell'oggetto target utilizzando il sensore di visione. Fare riferimento al programma di impostazione del lavoro VISION dedicato fornito dal produttore del sensore di visione.
Impostazione formato dati misurazione
Per utilizzare i dati di misurazione del sensore di visione nel lavoro con robot, è necessario eseguire la calibrazione delle coordinate del robot di visione, che deve essere eseguita prima di iniziare il lavoro utilizzando il programma di impostazione del sensore di visione. I dati di misurazione del sensore di visione devono essere trasferiti utilizzando le seguenti impostazioni di formato:
Formato | pos | , | x | , | y | , | angolo | , | var1 | , | var2 | , | … |
|---|
pos: Separatore che indica l'inizio dei dati di misurazione (prefisso)
x: Valore della coordinata X dell'oggetto misurato con il sensore di visione
y: Valore della coordinata Y dell'oggetto misurato utilizzando il sensore di visione
angolo: Valore dell'angolo di rotazione dell'oggetto misurato con il sensore di visione
Var1 … VarN: Informazioni misurate utilizzando il sensore di visione (ad esempio, dimensione oggetto / valore di controllo difetto) pos.254.5,-38.1,45.3,1,50.1 (descrizione: X=254.5, y=-38.1, angolo=145.3, var1=1, var2=50.1)
Impostazione programma robot
Una volta completata la connessione di comunicazione fisica tra il sensore di visione e il robot e l'impostazione del sensore di visione, è necessario impostare un programma per consentire il collegamento del sensore di visione e del programma del robot. È possibile collegare/comunicare/controllare le funzioni del sensore di visione esterno utilizzando Doosan robot Language (DRL) ed è possibile impostare il programma in Task Writer.
I dettagli e gli esempi completi di Doosan robot Language (DRL) sulle funzioni dei sensori di visione esterni sono forniti nel manuale di programmazione.
Collegamento del dispositivo esterno - piattaforma DART
La piattaforma DART è un software che viene eseguito su un computer desktop o laptop basato su sistema operativo Windows. Una volta che il controller e il desktop/laptop sono collegati tramite la porta LAN, tutte le funzioni del teach pendant sono disponibili dal momento in cui viene eseguita la piattaforma DART. A questo punto, è necessaria la seguente procedura di configurazione per il collegamento con i sottocontroller all'interno del controller.
Ricerca indirizzo IP e impostazione connessione
Impostazione della connessione di comunicazione
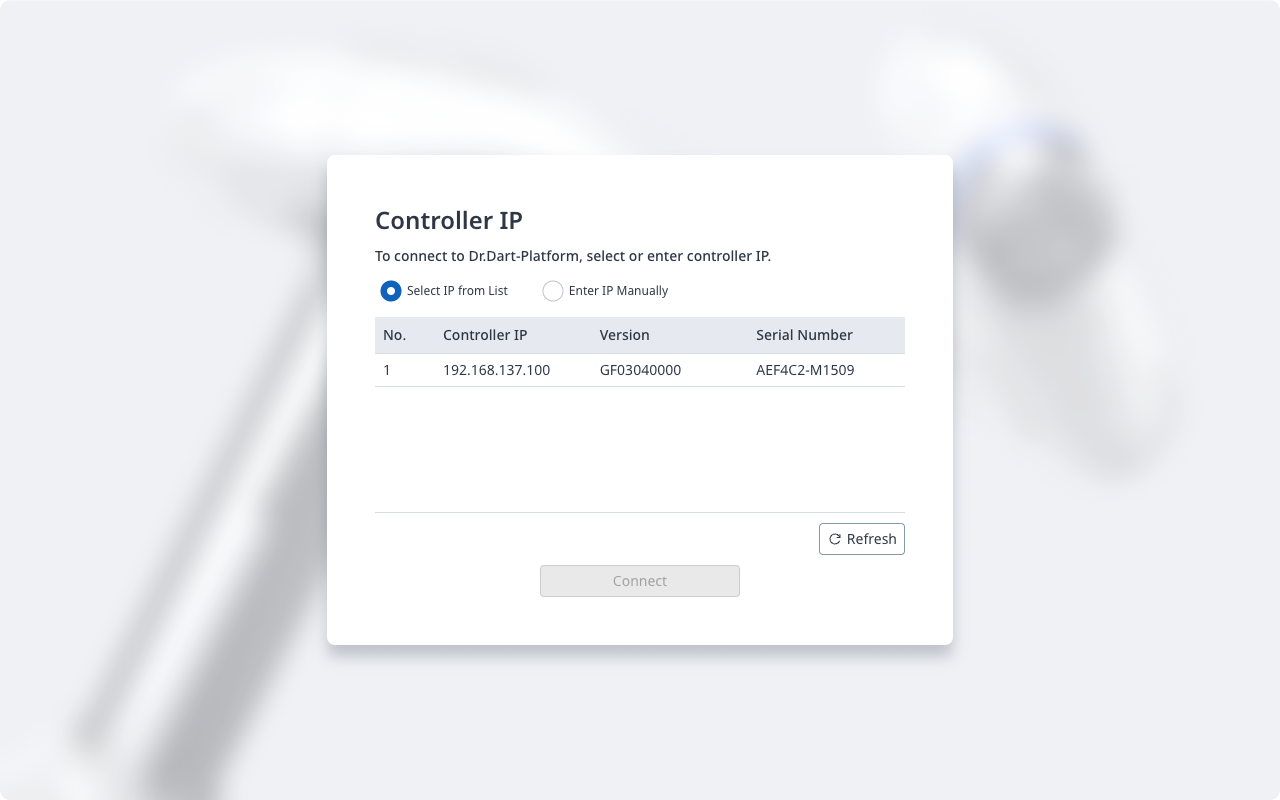
Quando la piattaforma DART viene eseguita dopo aver collegato il laptop alla porta LAN del controller, vengono ricercati automaticamente l'indirizzo IP del controller, le informazioni sulla versione del sub-controller e il numero di serie del robot necessari per stabilire una connessione.
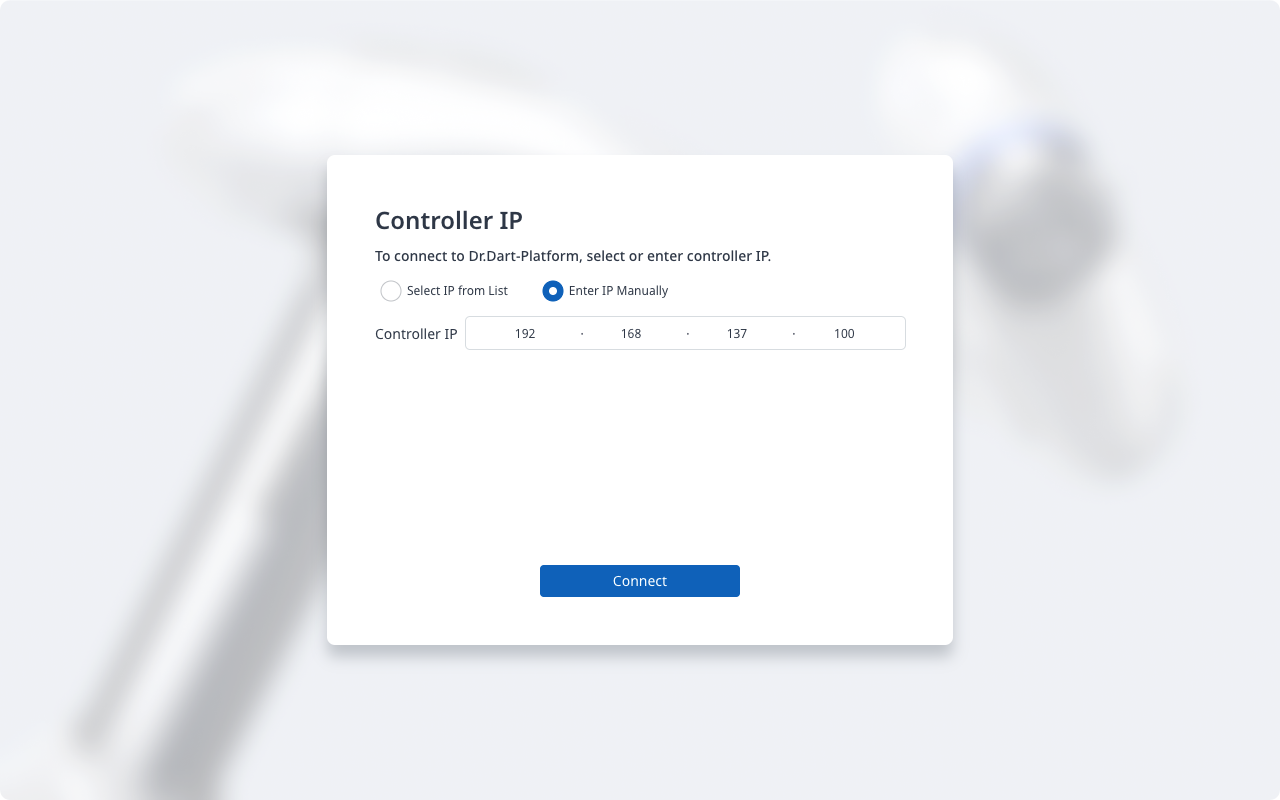
Se la ricerca non riesce, premere il pulsante Aggiorna per aggiornare o toccare Inserisci IP manualmente per immettere manualmente l'IP del controller.
Selezionando il numero di serie del robot da collegare e premendo il pulsante Connect (Connetti) si stabilisce una connessione tra la piattaforma DART e il sub-controller e il robot può essere utilizzato normalmente.
Se si verifica un problema con la connessione, provare la procedura riportata di seguito, ma se il problema persiste, contattare il personale di vendita o di assistenza per ricevere assistenza.
Se i risultati della ricerca per l'indirizzo IP del controller collegabile, le informazioni sulla versione del controller secondario e il numero di serie del robot non vengono visualizzati: Premere il pulsante Aggiorna per eseguire nuovamente la ricerca e provare a connettersi nuovamente in base alla procedura descritta sopra.
Quindi, se viene visualizzata la pagina controllo trasferimento come mostrato di seguito, toccare il pulsante ritiro forzato per tentare di connettersi alla piattaforma.