
Antisbandamento
Impostazione antisbandamento
Se il robot si ferma nella zona collaborativa a causa della modalità di arresto di sicurezza SS2 o RS1, Il ripristino non è disponibile in stato interrotto, ma è possibile riprendere il lavoro con l'input di spinta
- Per impostare Nudge, selezionare robot > Nudge item (robot > Nudge) dalla cella di lavoro robot.
Per ulteriori informazioni, vedere Nudge.
Voci di menu
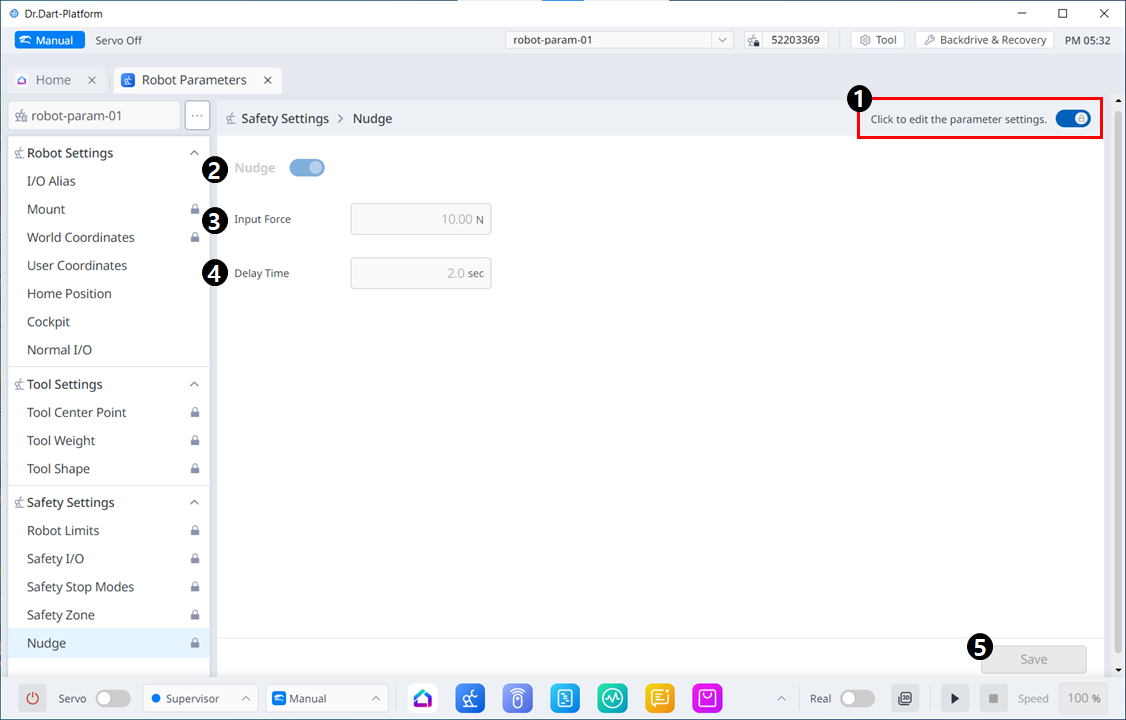
| Elemento | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Se utilizzare Nudge | Questo pulsante consente di scegliere se utilizzare Nudge. |
| 3 | Forza input | In questo campo viene inserito il valore di forza desiderato. |
| 4 | Ritardo | In questo campo viene impostato il tempo di ritardo. |
| 5 | Salva | Questo pulsante consente di salvare il valore impostato. |