
Rögzítés
A robot telepítési pózja a robot telepítési pózja (rögzítés) menüben állítható be. Ha a robot sík felületre van felszerelve, ez a lépés kihagyható.
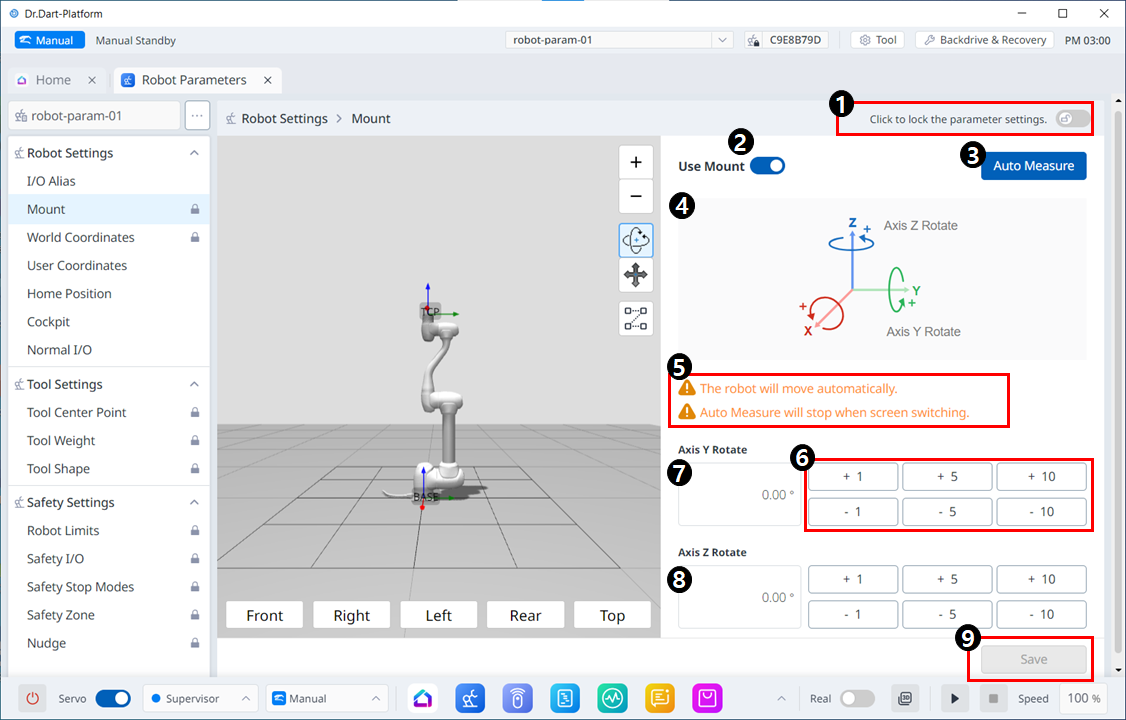
A robot telepítési pózja a Robot Parameters > Robot Settings > Mount (Robot paraméterek > Robot beállítások > Mount) menüpontban állítható be.
- A beépítési szög az automatikus mérés funkcióval mérhető. Ha azonban a szög kisebb, mint 5 fok, az automatikus mérés nem érhető el.
- Ha a robot a mennyezetre vagy a falra van felszerelve, a robot telepítési szöge beállítható Y- és z-tengely forgással.
- Mivel a szerszám súlyának automatikus kiszámítása a gravitáció alapján történik, ajánlott a szerszám súlyának visszaállítása a rögzítés beállítása után.
VIGYÁZAT
- A robot telepítési pozíciójának (felszerelésének) beállításakor a Workcell Item (munkacella elem) beállításakor ajánlott a világ koordinátáinak módosítása is. Ha a világ koordinátái nem változnak, a robot pózol a robot szimulátor képernyőjén a Teach medál jelenik meg, mint a robot telepítve van a sík felületen (alap).
Menü elrendezése
| Tétel | Leírás | |
|---|---|---|
| 1 | Kapcsoló gomb zárolása | A beállított érték zárolása. A biztonsági jelszó szükséges a beállított érték módosításához. |
| 2 | Használja a Mount | Gomb a rögzítés használatának engedélyezéséhez. A gomb a kioldás után elérhető. |
| 3 | Automatikus mérés | Ez automatizálja a rendelt műveletet. A mellette lévő 3D szimuláció ezt a mozgást mutatja. |
| 4 | Információs kép | Ez egy kép, ami a hegyről szól. |
| 5 | Információs üzenet | Ez egy üzenet, amely az automatikus mérésről szól. |
| 6 | Növelés/csökkentés gomb | Ez lehetővé teszi, hogy növelje vagy csökkentse a kívánt mértékben. |
| 7 | Y-tengely Forgatás beviteli mező | Az Y tengely forgási szöge közvetlenül megadható. |
| 8 | Z-tengely Forgatás beviteli mező | A z tengely forgási szöge közvetlenül megadható. |
| 9 | Apply (alkalmazás) gomb | Ez lehetővé teszi a beállított értékek alkalmazását. |