A feladatszerkesztő parancs compliance/Force Control koncepciójának áttekintése
OPCIONÁLIS KEMÉNY 20 PERC
A Force Control és Compliance Control olyan funkciók, amelyek a robot erejét szabályozzák. Továbbá, a mozgás parancsok hozzáadásával az erő a mozgás közben is vezérelhető. A Compliance Control és az Force Control a következő különbségeket tartalmazza.
- Megfelelőség-ellenőrzés
- A Compliance Control esetében a robot megfelel a robot TCP végén lévő külső erőnek, és amikor a külső erőt eltávolítják, egy erő keletkezik, amely a robotot visszahelyezi a kívánt helyre.
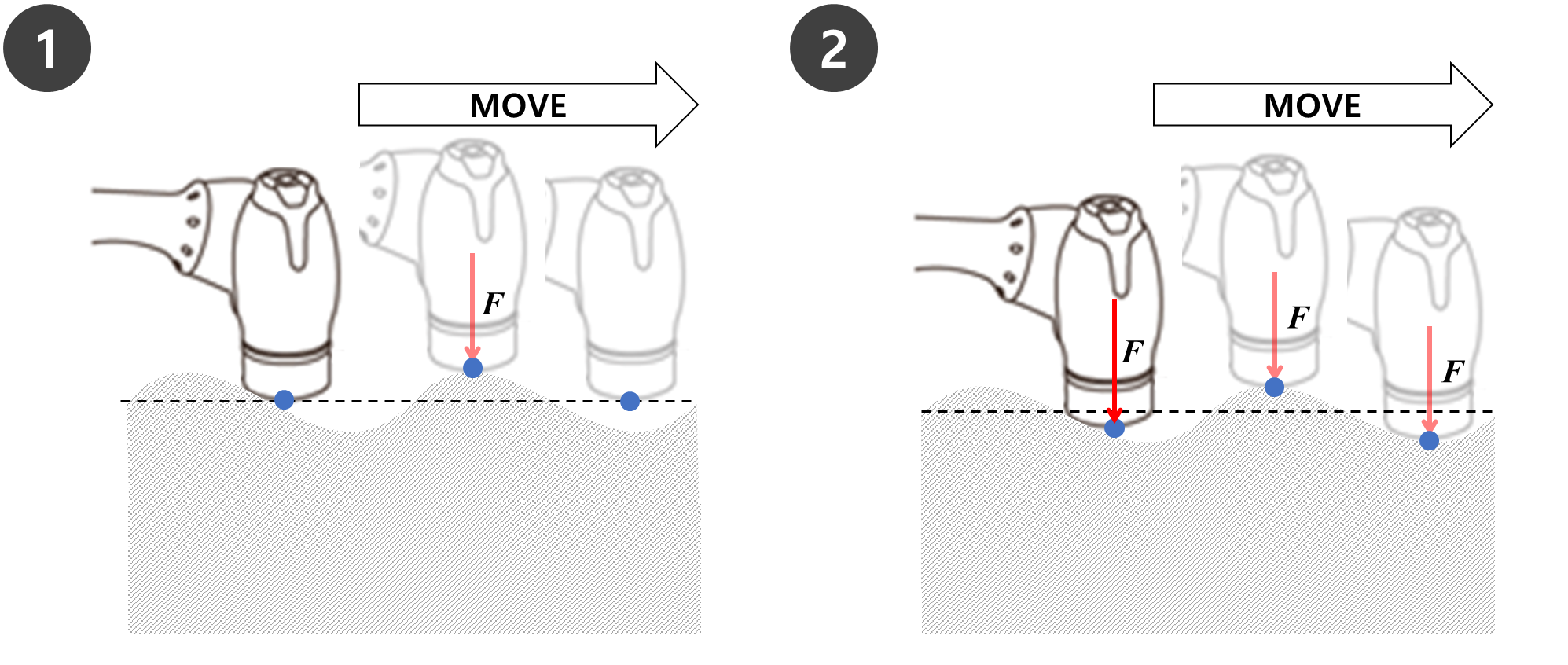
- Ez a megközelítés akkor alkalmazható, ha egy robot egyenes vonalban mozog egy rögös felületen, és biztosítani szeretné, hogy a robot mozogjon anélkül, hogy kárt okozna magának vagy a felületnek. Ez a munkadarabok közelében bekövetkező váratlan ütközések megelőzésére is használható.
- Erőszabályozás
- A Force Control esetében az erő a TCP-re kerül a robot végén. A gyorsulás abban az irányban jön létre, amelyben az erő keletkezik, és a robot egyidejűleg az erő irányába mozog a mozgás irányán kívül.
- Amikor a robot érintkezésbe kerül egy tárggyal, az erő addig kerül az objektumra, amíg a beállított erő és az objektum visszataszító ereje egyensúlyban nem van.
- Ez a megközelítés akkor alkalmazható, ha egy robot egyenes vonalban mozog egy rögös felületen, és biztosítani szeretné, hogy állandó erő kerüljön a felületre. Ez olyan feladatokra is használható, amelyek megkövetelik, hogy a robot állandó erővel nyomjon, azaz polírozási munkát.
Megjegyzés
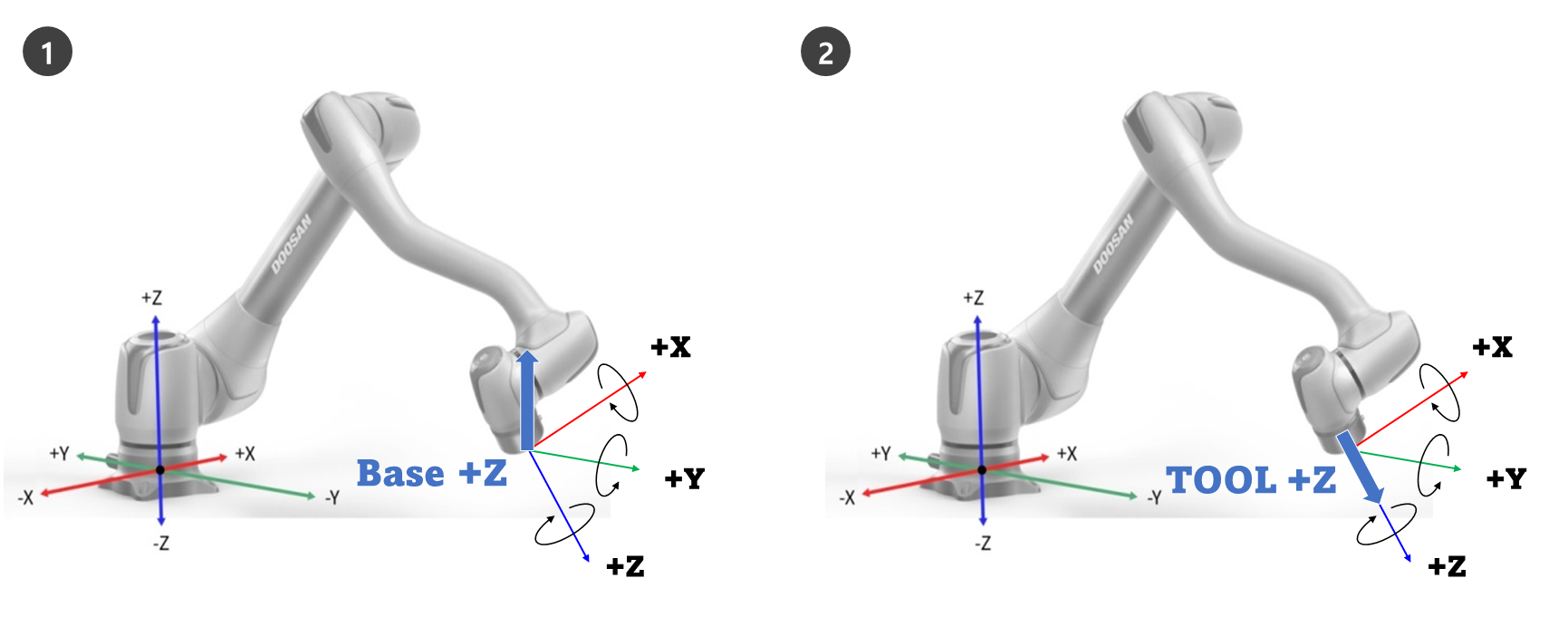
A compliance és Force parancsok végrehajtása az aktuális koordináták alapján történik. Egy feladat alapértelmezett koordinátája a bázis koordináták, és a koordináták a Set paranccsal módosíthatók.
- Ábra A 1 az a működési irány, amikor a +z irányú erő/megfelelőség ellenőrzést az alapkoordinátákon alkalmazzák.
- Ábra A 2 az a működési irány, amikor a szerszám koordinátáit +z irányban erő/megfelelőség vezérlik.
Megfelelőség-ellenőrzés
A megfelelőség-ellenőrzés az a funkció, amely megfelel a külső erőnek a beállított merevség szerint, amikor a robot végén erő kerül a TCOP-ra. Kiegyensúlyozza az erőket a célponton, és ez egy olyan vezérlési módszer, amely taszító erőt generál, ha az elmozdulás a kiegyensúlyozási ponttól távol történik. A megfelelőség-ellenőrzés során a robot vége rugóként pattan.
- Ha ütközés történik, amikor a mozgásvezérlést egyedül használják, akkor előfordulhat, hogy az ütköző tárgy megsérülhet.
- A Doosan Robotics robotok ütközéskor biztonságosan leállnak, de a felhasználó beállításaitól függően, mint például a biztonsági határértékek > ütközési érzékenység, a következő helyzetek fordulhatnak elő.
- Ha a szabálykövető vezérlés be értékre van állítva a mozgásvezérlés során, a robot elmozdul, miközben megfelel az ütköző tárgynak.
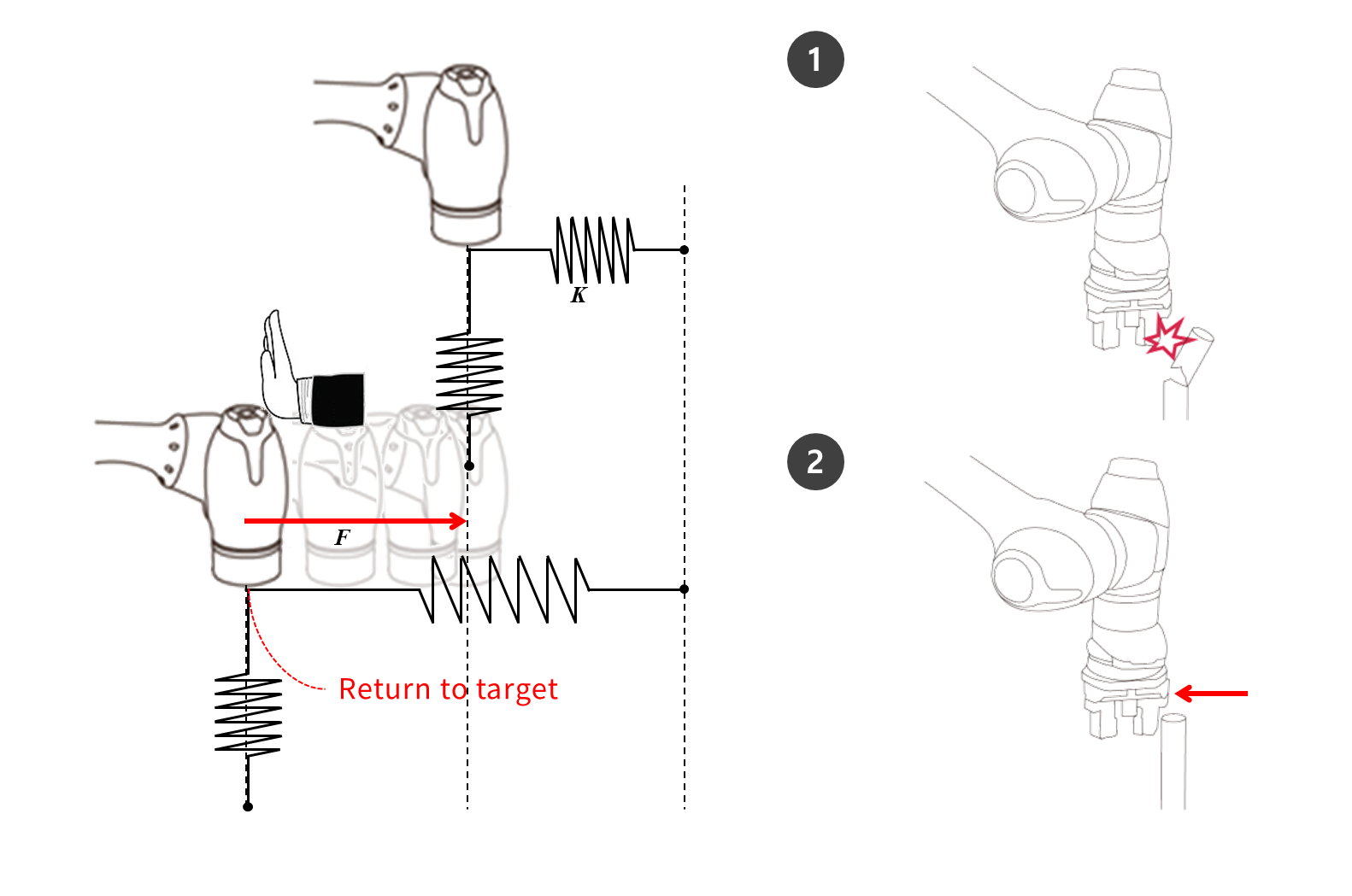
Ha F a külső erő, K a merevség és X a távolság, a következő képletek igazak.
- F = K * X
- K = F / X
- X = F / K
A fenti képletek alapján, ha a megfelelőség-ellenőrzés merevsége 1000N/m-re van állítva, és ha a robot 1 mm-re mozog, a keletkező külső erő 1N.
- F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Megjegyzés
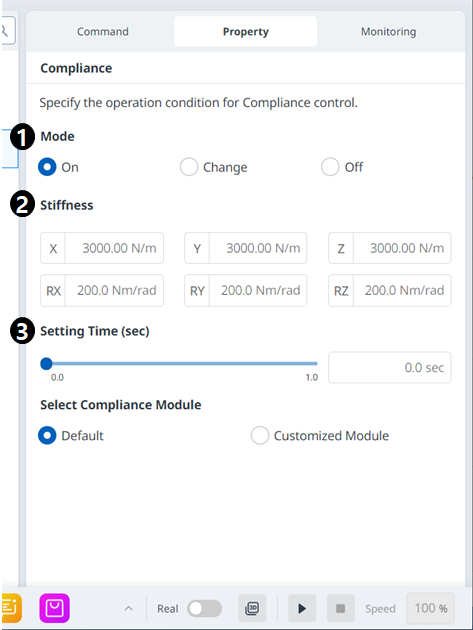
A Property of Compliance (megfelelőség tulajdonjoga) parancsban a következő értékek adhatók meg:
- Üzemmód
- Be: Lehetővé teszi a megfelelőség ellenőrzését
- Módosítás: Ha a megfelelőségi mód be értékre van állítva, akkor merevségre változik
- Ki: Letiltja a megfelelőség-ellenőrzést
- Merevségi tartomány
- M/H sorozat: Fordítás (0 ~ 20000N / m), forgatás (0 ~ 1000nm / rad)
- A sorozat: Fordítás (0 ~ 10000N / m), forgatás (0 ~ 300Nm / rad)
- Az alacsonyabb merevségi értékek lágyabban reagálnak a külső erőre, és több időt igényelnek a célponthoz való visszatéréshez
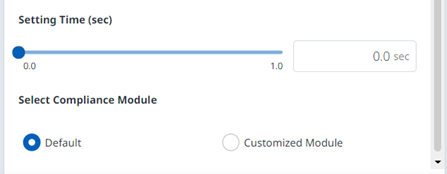
- Idő beállítása
- Az aktuális merevségi érték eléréséhez szükséges idő (0-1s)
VIGYÁZAT
- A szerszámsúlyt és a TCP-t (Tool Center Point) pontosan be kell állítani. A helytelen szerszámsúly miatt a robot külső erőként érzékeli a szerszámsúlyt, és a megfelelőségi parancs be állításával helyhiba lép fel.
- A ruha feszessége külső nyomatékot generálhat a roboton. Ezért legyen óvatos, amikor telepíti a ruha csomag.
- A megfelelőséget nem lehet be- és kikapcsolni, miközben async mozgás vagy keverési mozgás van végrehajtva.
- A Compliance Command On (megfelelőségi parancs be) alatt csak lineáris mozgás engedélyezett. Az olyan közös mozgások, mint a MoveJ és a MoveSJ, nem megengedettek.
- A Compliance Command on (megfelelőségi parancs) alatt az eszköz súlya vagy a TCP nem módosítható.
- A Compliance Command On (megfelelőségi parancs bekapcsolva) alatt előfordulhat, hogy a mozgás végrehajtása során keletkező nyomaték betartása miatt nem éri el pontosan a célpontot. Ezért ajánlott a célpont közelében bekapcsolni a megfelelőség-ellenőrzést. Vagy nagy merevségi érték beállításával minimalizálható a pozícióhiba.
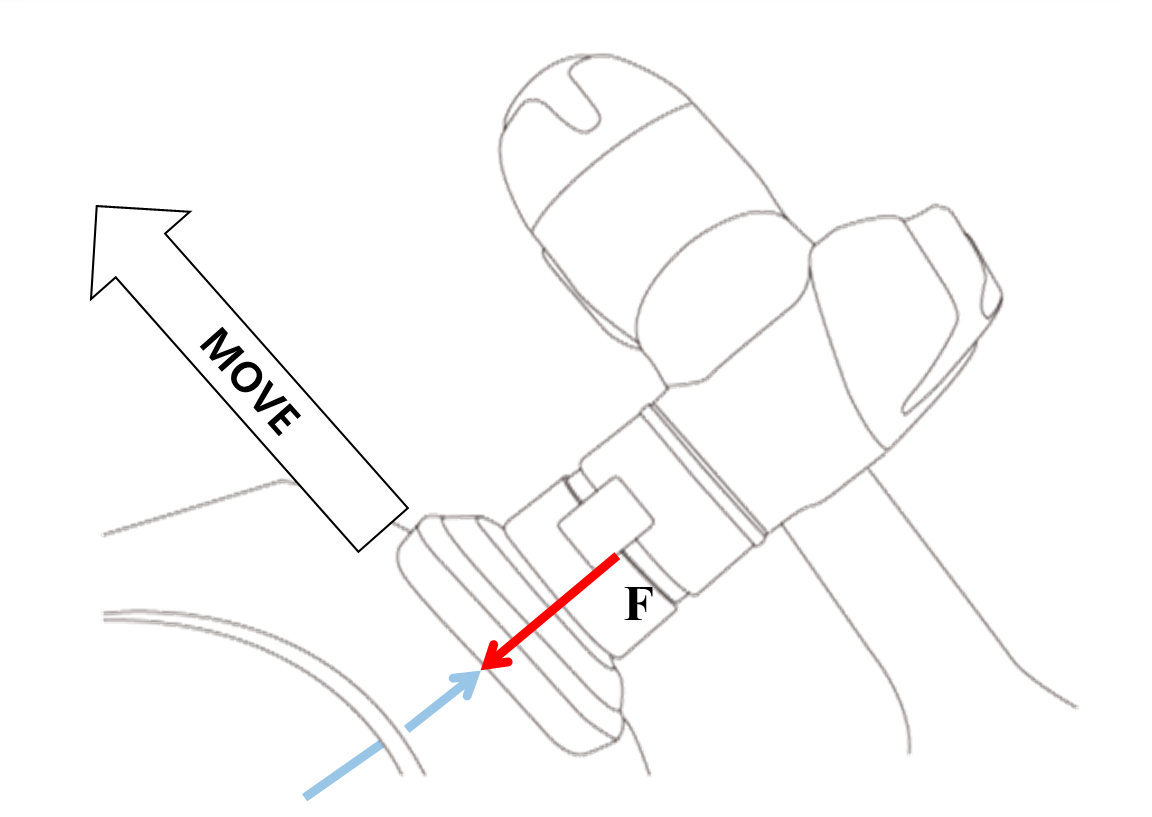
Erőszabályozás
Az erőszabályozás olyan funkció, amely erőt alkalmaz az erőszabályozás irányában, amíg a beállított erő és a taszító erő egyensúlyban nem van
- A robotot a beállított erőirányban mozgatja, és ha egy tárggyal érintkezik, megtartja a bevitt erőt (N)
- Képes az erő irányától eltérő irányban történő mozgásvezérlésre, miközben állandó erőt alkalmaz
- A minimális beállítás +/- 10N, és finomhangolható 0,2N felbontással
- A Force Control nem érhető el szingularitás zónában
- Általában a Compliance Control-t az erőszabályozással együtt használják, hogy az erőszabályozás megfeleljen a külső erőnek
Megjegyzés
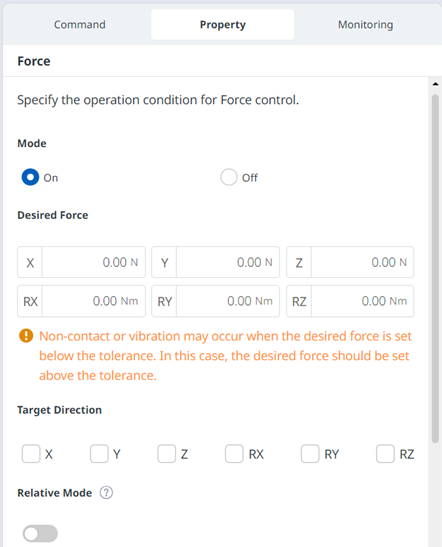
A Force Command tulajdonságból a következő értékek adhatók meg.
- Üzemmód
- Be: Lehetővé teszi az erőszabályozást
- Ki: Letiltja az erőszabályozást
- Kívánt erőtartomány
- X, Y, Z: 10 - (minden robot maximális száma) N
- A, B, C: 5 - (minden robot maximális) Nm
- A maximális erővel kapcsolatos további információkért lásd Biztonsági paraméterek felső/alsó küszöb tartományai és alapértelmezett értékei:.
- Célirány
- Az egyes irányokra kijelölt célértékre lép.
- Több választás is lehetséges.
- Az erőszabályozás csak az erőbeállítás utáni iránybeállítással hajtható végre.
- Ha a több kiválasztott irány közül az egyik eléri a célerőt, akkor tovább mozog, amíg a másik irányba el nem éri a célértéket.
- Relatív mód
- Ha ez az üzemmód engedélyezve van, akkor a robotra ható külső erőt 0-ra kalibrálja az erőszabályozás pontosságának javítása érdekében.
- Ha a relatív mód le van tiltva, a célpontra ható tényleges erő megegyezik a beállított erő és a külső erő összegével.
- Ha a relatív mód engedélyezve van, a célpontra ható tényleges erő megegyezik a beállított erővel.
- Az erőszabályozás során a póz vagy a külső erő függvényében eltérés fordulhat elő.
- Az erőszabályozás során lehetséges, hogy nem éri el a pontos célpontot. Ezért ajánlott az erőszabályozás engedélyezése a célpont közelében.
- Ha ez az üzemmód engedélyezve van, akkor a robotra ható külső erőt 0-ra kalibrálja az erőszabályozás pontosságának javítása érdekében.
- Idő beállítása
- Az az idő, amely az aktuális erőérték eléréséhez szükséges (0-1s)