
Világ koordináták beállítása
Beállítható a robotot és a munkadarabot ábrázoló koordináta-rendszer. Ennek a koordináta-rendszernek a neve világ koordináta-rendszer, amely nem azonos az alap koordináta-rendszerrel, amelyek az alaphoz vannak rögzítve. Az alap koordináta-rendszer pozíciót be lehet állítani a világ koordináták segítségével, és a világ koordinátákat ki lehet választani a robot tanítása és mozgatása közben a Task Builder és Task Writer képernyőn. A világ koordináták beállítására érintse meg a 
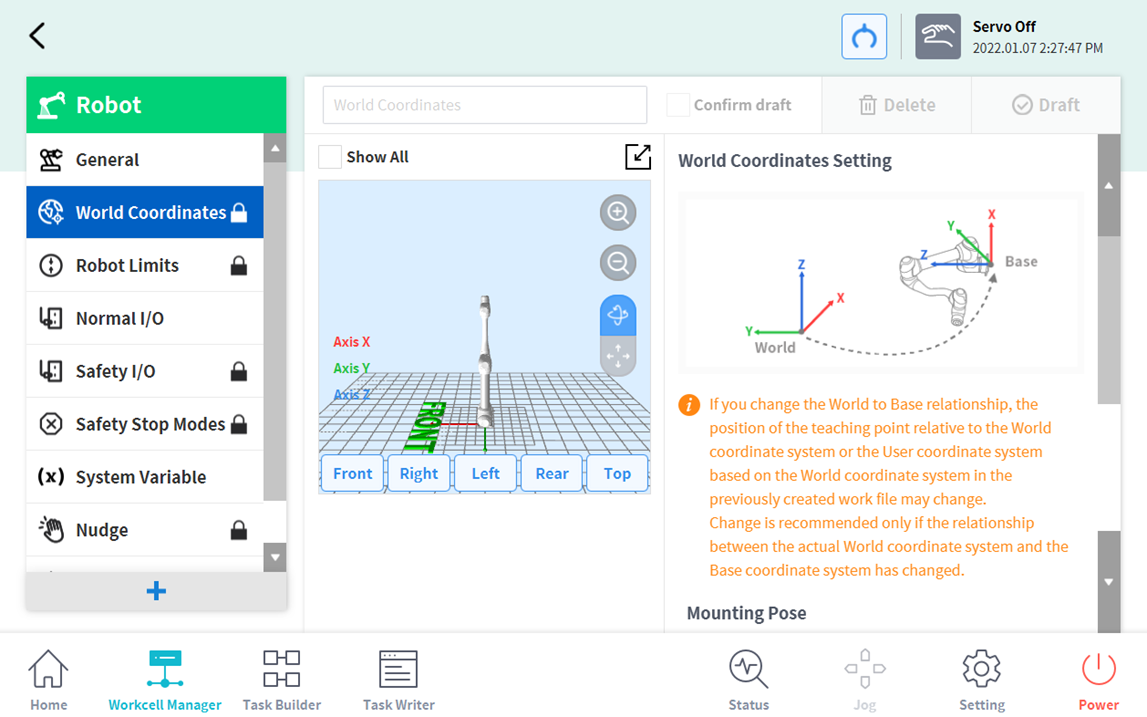
- Érintse meg a Szerkesztés gombot a felső részen.
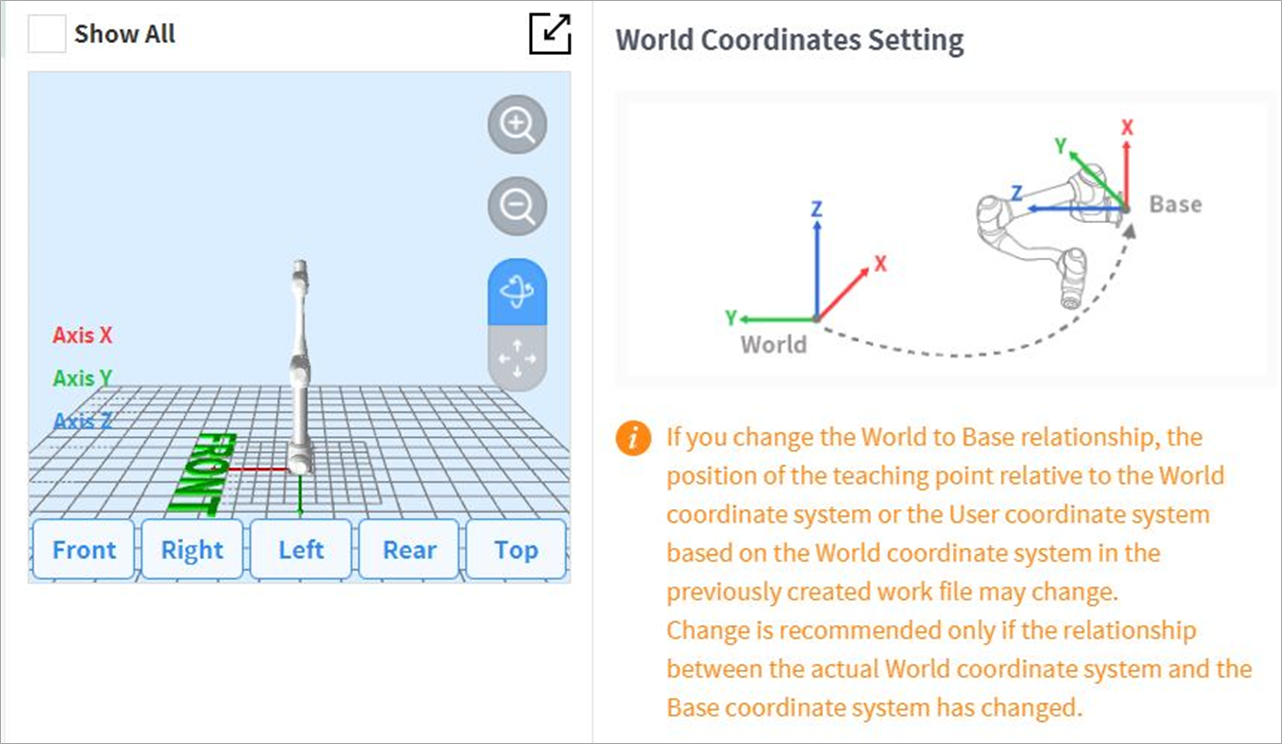
Lásd a világ koordináta és az alap koordináta közötti kapcsolatot bemutató ábrát, valamint a kapcsolódó óvintézkedéseket.
Figyelem
A világ és alap koordináták közötti kapcsolat változásakor változhat a világ koordinátákon alapuló felhasználói koordináták és a világ koordináták tanítási pontja. A változtatás csak akkor ajánlott, ha a világ koordináták és az alap koordináták közötti kapcsolat ténylegesen megváltozik.
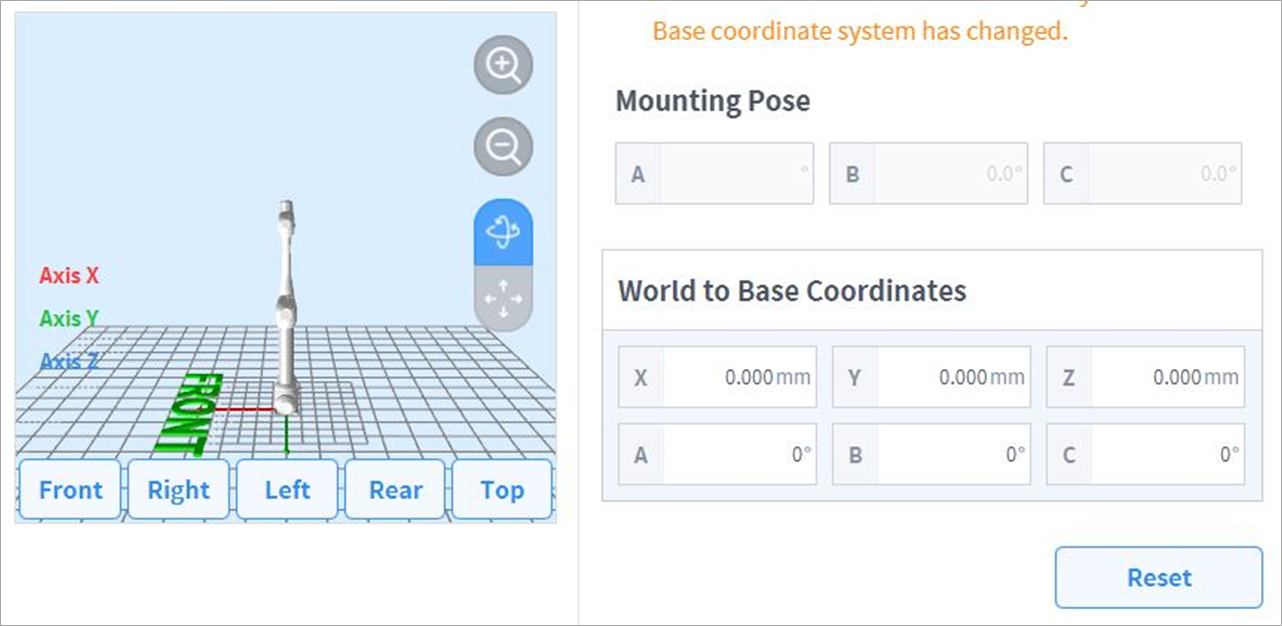
- A szerelési póz (telepítési dőlésszög) jelenik meg a jobb oldal közepén. A világ koordináták általában a felhasználó nézőpontjából írják le a munkakörnyezetet, ezért a világ koordináta-rendszer Z-iránya a mennyezet irányába mutat. Mivel az alap koordináta-rendszer egyik tengelye a robot alsó síkjához van rögzítve, a világ koordináták és az alap koordináták közötti kapcsolat a robot felszerelési helye/póza szerint változik. A fenti ábra falra szerelt robotot feltételez. Ebben az esetben az alap koordináta-rendszer Z-tengelye merőleges a falra, ami párhuzamos a világ koordináta-rendszer Y-tengelyével, a szerelési pozíció dőlésszöge és forgásszöge rendre mint 90 illetve 0 fok jelenik meg. A világ és alap koordináták közötti kapcsolat úgy határozható meg, mint az alap koordináták kapcsolata a Világkoordináták alapján. Ha létezik előre meghatározott elrendezés a munkakörnyezet számára, akkor annak megfelelően állítsa be a koordinátákat. Az X/Y/Z koordináták elmozdulást, míg az A/B/C értékek forgást jelentenek az Euler Z-Y-Z definíciója alapján,. Ha a szerelési póz a robot telepítési póza szerint van meghatározva, megfelelő a B/C forgásszög használata, mint a B/C szerelési póz. Ha azonban a szerelési póz az Automatikus feltételező funkcióval van beállítva, a feltételezett érték eltérést tartalmazhat, ezért az elrendezés szerint meghatározott forgásszög használata ajánlott.
- Érintse meg az Alkalmazás gombot.
- Érintse meg a Megerősítés gombot.
Megjegyzés
A Task Builder és Task Writer modulokkal a GF020400-nál korábbi SW verziókban a telepítési dőlés alkalmazása után létrehozott felhasználói programokban az alkalmazott telepítési dőléssel kell beállítani a világ koordinátákat a GF020400-nál újabb SW verziókra történő frissítéskor, és felhasználói programban az összes alap koordinátát világ koordinátára kell alakítani, hogy a létező tanulási pontokat megfelelőe használni lehessen.
Ha több robot közös munkatérben dolgozik, vagy ha a robot mozgó eszközre, például mobil alapra vagy lineáris pályára van felszerelve, a munkadarab és a robot alapja közötti kapcsolat és tanítási pont pozíciója változhat. Ilyen környezetben beállítható a világ koordináta-rendszer, mivel könnyű vele a tanítás, a munka és a megosztás.
Szerszám felszerelésekor és cseréjekor a szerszám súlyát még a robot működtetése előtt konfigurálni kell. További információkért a szerszám súlyának beállításáról lásd Szerszám súlyának beállítása.