
Szerszám középpont (TCP) beállítása
A szerszám középpont (TCP) konfigurálásakor a karima koordináta-rendszer szerinti pozíciót és forgásszöget is meg kell határozni. A karima koordináta-rendszer alapértelmezett kezdőpontja és a szerszám középpont (TCP) közötti távolság X, Y és Z irányban nem állítható be 10000 mm-nél nagyobb értékre. Ráadásul, ha az X, Y és Z átalakított hosszúsága (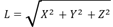
Különösen, ha a TCP az Automatikus kiszámítás funkcióval van konfigurálva, a számítás csak az X, Y és Z pozíciók alapján végezhető el, ezért meg kell adni a forgásszöget. A forgásszöget az A, B és C elemekkel kell meghatározni, és az Euler Z-Y-Z forgatási módszeren alapul.
Az x, y, z-vel kifejezett koordinátatengely és az X, Y, Z-vel kifejezett koordinátatengely meghatározásai az alábbiak:
- Az (x, y, z) „Karima koordináta” koordinátatengelye: A karima végén meghatározott koordinátatengely-irány azonos a (0,0,0,0,0,0) robotcsuklószögű robotkoordinátával.
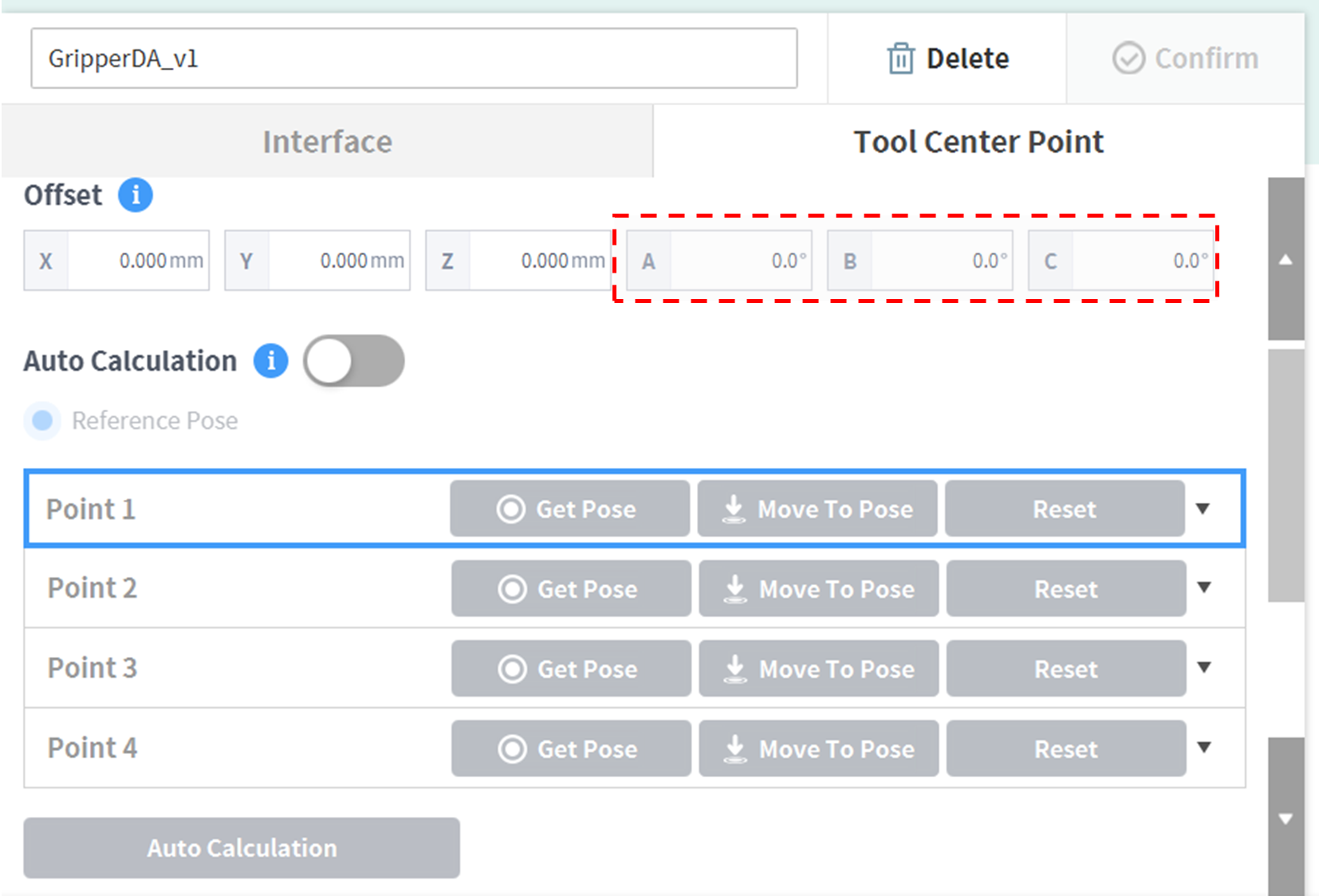
- Az (X,Y,Z) „TCP koordináta” koordinátatengelye: A koordinátatengely a karima végére felszerelt szerszám végén vagy a munkapontban van meghatározva. A „TCP koordináta” forgásszöge a „Karima koordináta” alapján van meghatározva az alábbi 1) – 3) sorrendben:
1) Forgatás A fokkal a Karima koordináta z tengelye mentén
2) Forgatás B fokkal az 1) szerint forgatott koordináta y’ tengelye mentén
3) Forgatás C fokkal a 2) szerint forgatott koordináta z’’ tengelye mentén
Íme, néhány példa a TCP konfigurálására a fent leírt módszer szerint:
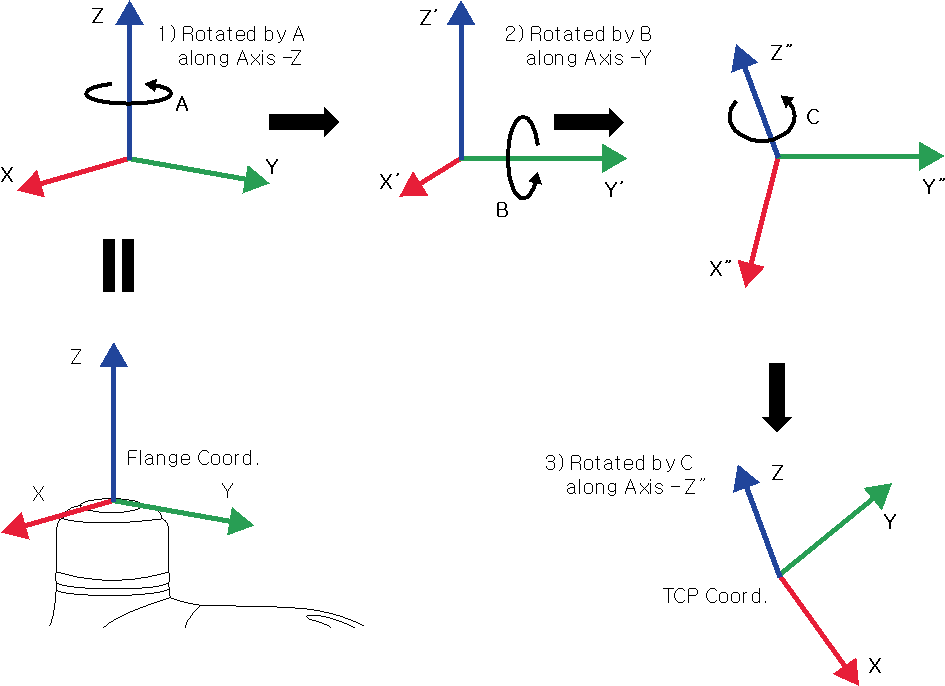
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Általános megfogó Z-irányú eltolással (TCP Coord)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Bal megfogó 45 fokos szögben (TCP Coord. B)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Jobb megfogó 45 fokos szögben (TCP Coord. J)