
Megérteni a robot mozgását
KÖTELEZŐ EGYSZERŰ 5 PERC
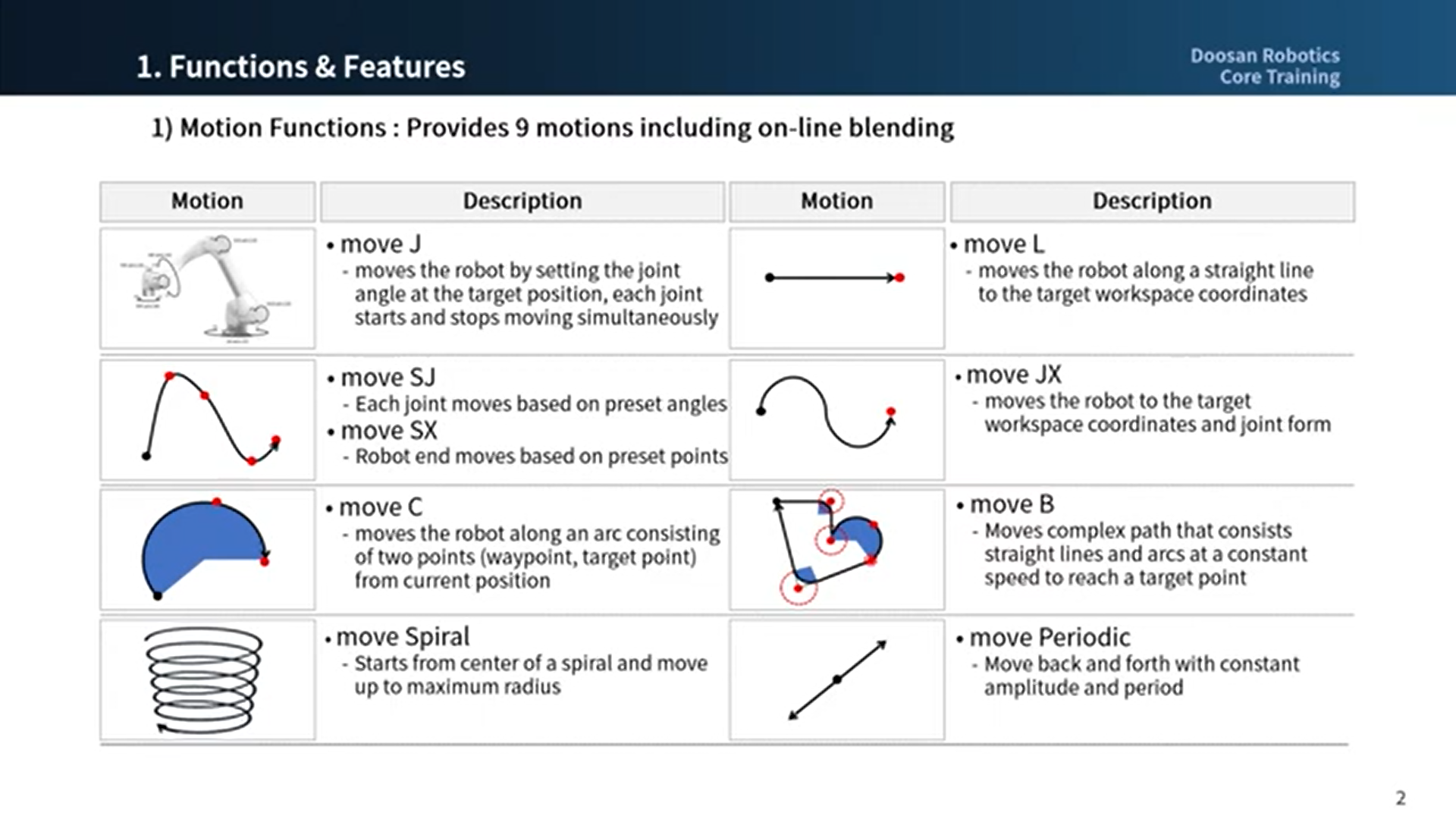
A Doosan robotikai robotok kilenc mozgást kínálnak. A robot mozgását standard mozgások, a MoveJ és a MoveL, valamint a két mozgásból származó 7 mozgás vezérli.
A Robot Motion típusai
| Mozgás | Funkció | |
|---|---|---|
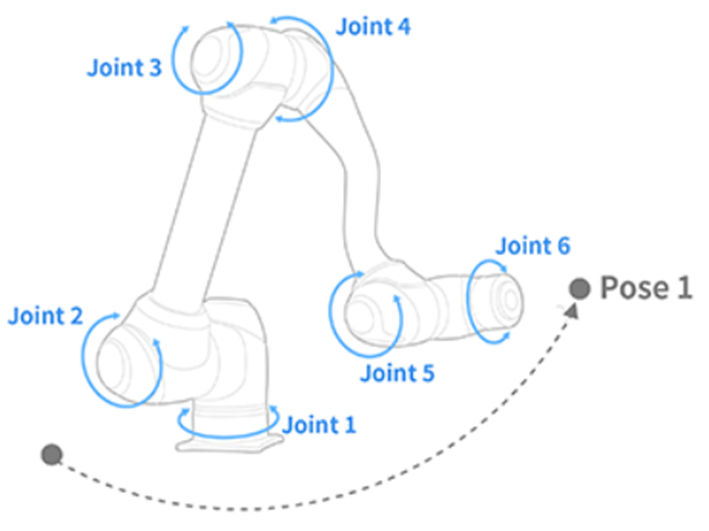
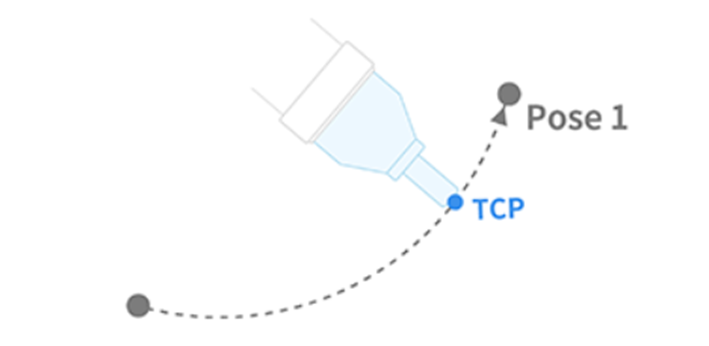
| 1 | MOVJ | A robot minden egyes csatlakozása az aktuális szögtől a célszögig mozog, és egyidejűleg megáll
|
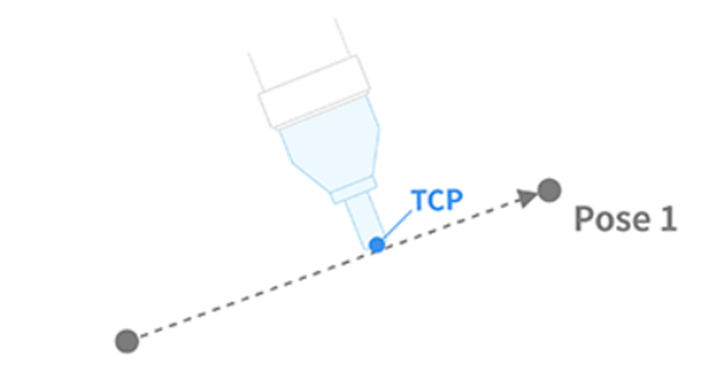
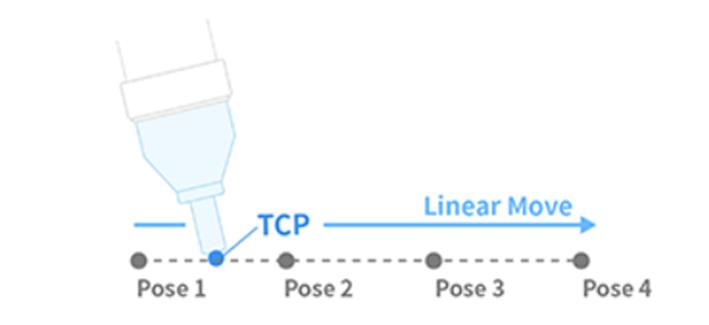
| 2 | MOVEL | A robot a célpontra mozog, miközben egyenesen tartja a robot TCP-t.
|
| 3 | MOVSJ | A robot a robot által beállított összes szög alatt mozog
|
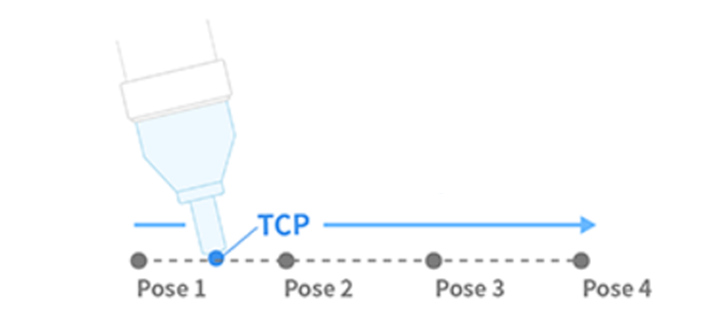
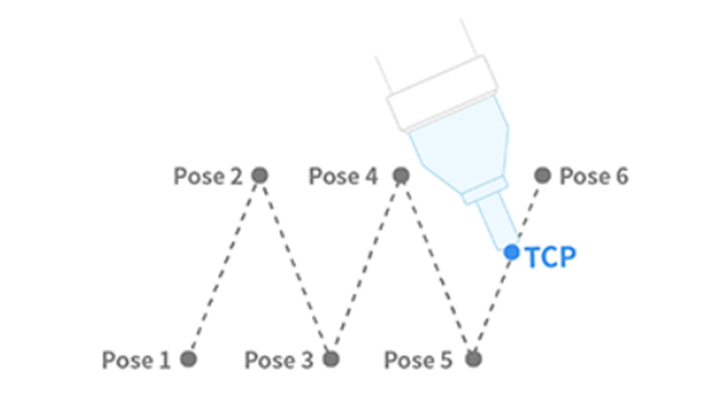
| 4 | MoveSX | A robot TCP minden ponton végighalad
|
| 5 | MOVJX | A robot póz úgy van kijelölve, hogy a robot TCP a célpontra mozog
|
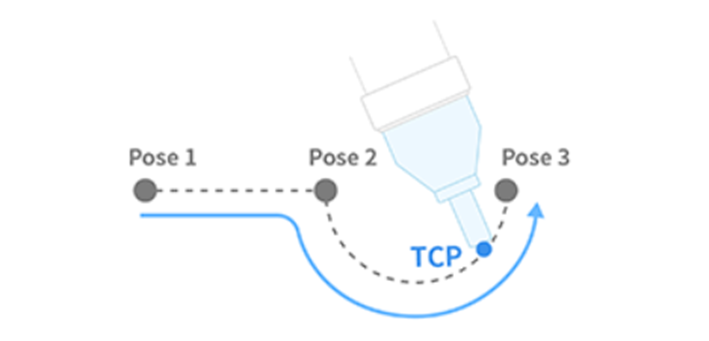
| 6 | MOVC | A robot TCP az ív megtartása mellett a célpontra lép
|
| 7 | MOVB | A robot egy folyamatos egyenes vonalakból és ívekből álló szakaszon halad át a végső célpontig
|
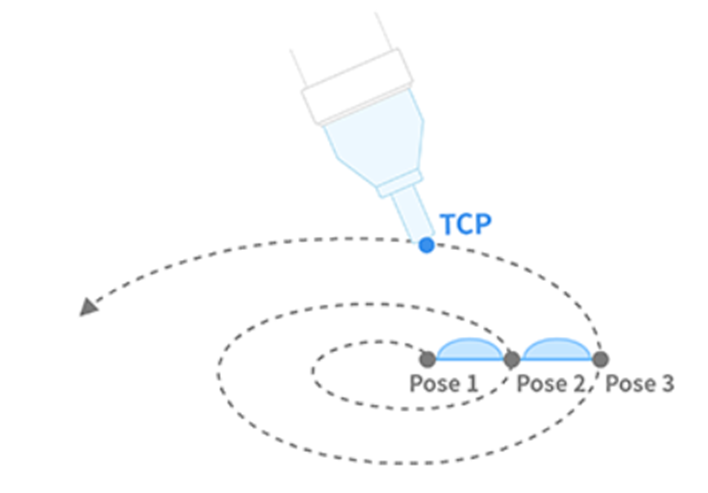
| 8 | MoveSpiral | A robot a spirális középponttól a maximális sugárig mozog
|
| 9 | MovePeriodikus | A robot állandó amplitúdójú és ciklusú útvonalon halad
|
&mód
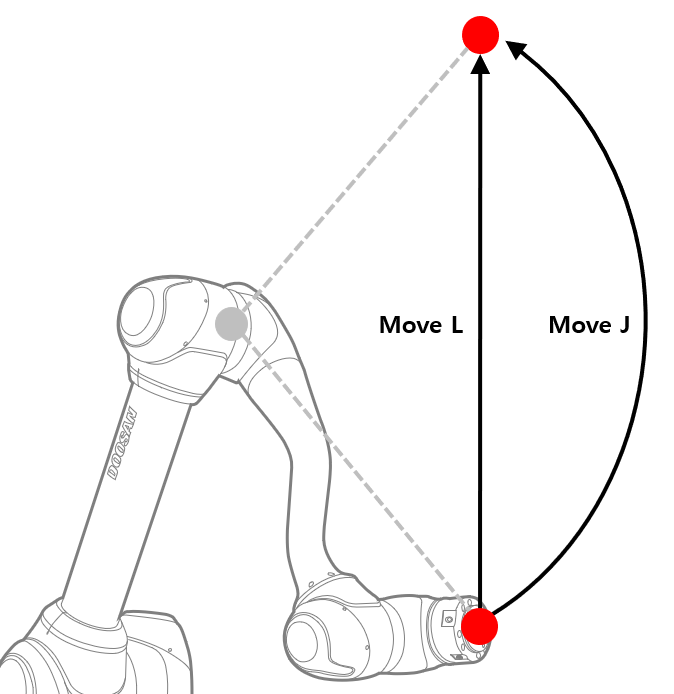
A robotmozgás használata előtt fontos megérteni a MoveJ és a MoveL standard mozgásait.
- J a ModeJ-ben az ízületekre vonatkozik. Ebben a mozgásban minden csukló a célszögbe mozog, és egyszerre megáll.
- L a MoveL-ben lineáris. Ebben a mozdulat során a robot végén lévő TCP lineáris mozgással a cél póz (pozíció és szög) felé mozog.
| Típus | MOVJ | MOVEL | |
|---|---|---|---|
| 1 | Mozgatási módszer |
|
|
| 2 | Előny |
|
|
| 3 | Hátrány |
|
|
| 4 | Kihasználtság |
|
|