
Valós üzemmód képernyő: Végeffektor információk fül
A Task Builder valós üzemmód képernyőn a végeffektor információk fül felépítése a következő:
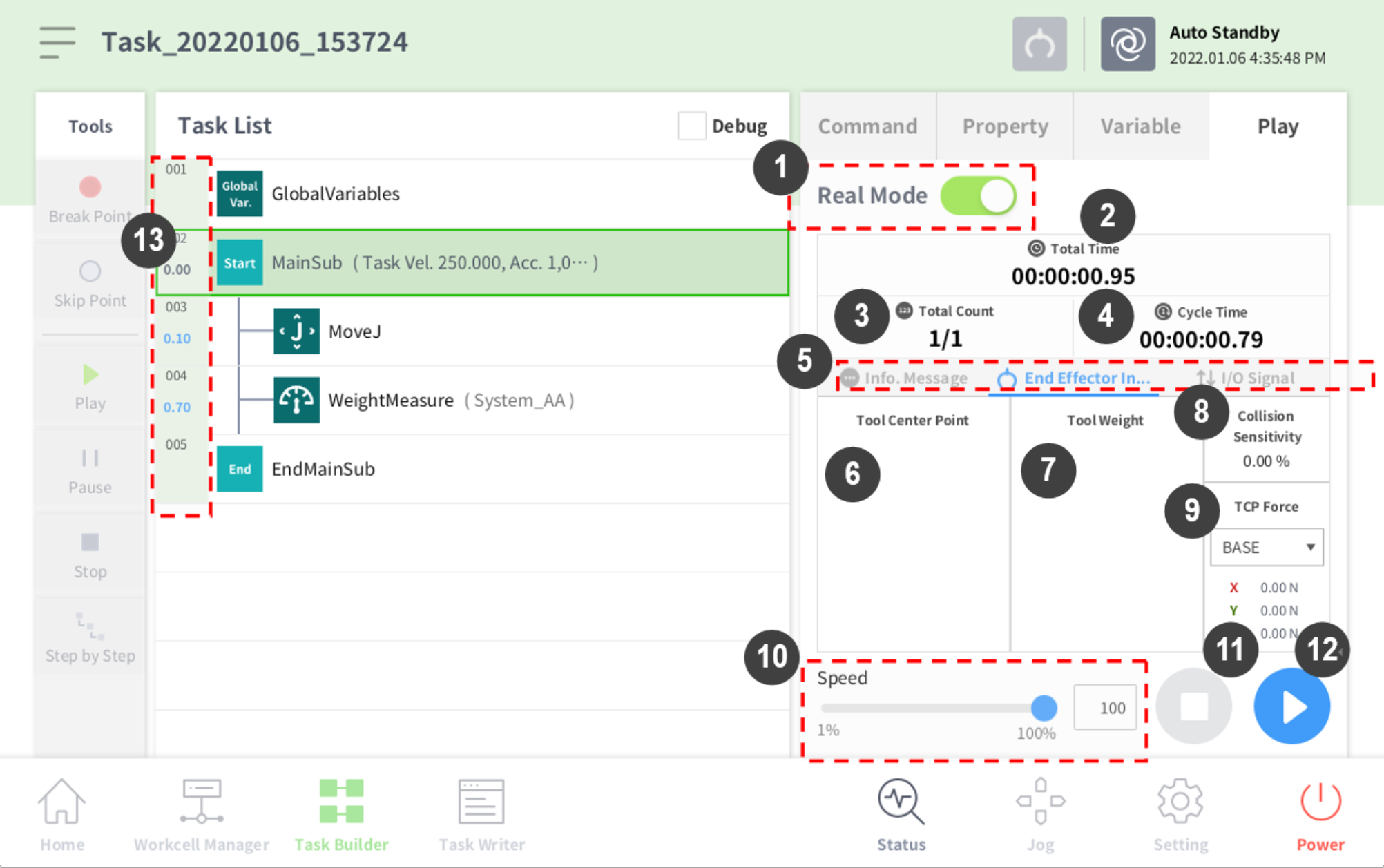
Sz. | Elem | Leírás |
1 | Real Mode ( | Beállítja a robot próbalejátszási üzemmódját.
|
2 | Total time | A feladat végrehajtása után eltelt teljes időt jeleníti meg. |
3 | Total count | Megjeleníti a feladat végrehajtások teljes számát. |
4 | Average execution time | A feladatlistán lévő feladat egyetlen ciklusának végrehajtásával eltöltött átlagos időt jeleníti meg. |
5 | Information Screen Shift Tab | Válthat a robot Tájékoztató üzenet képernyője, a végfelhasználói információs képernyő és a bemeneti/kimeneti információs képernyő között.
|
6 | Tool center point information area | Megjeleníti a léptetés vagy a beállított TCP parancs szerszám középpontot és súlyt konfiguráló funkciói által konfigurált szerszámközéppont információkat. |
7 | Tool weight information | Megjeleníti a léptetés vagy a beállított TCP parancs szerszám középpontot és súlyt konfiguráló funkciói által konfigurált szerszám súly információkat. |
8 | Collision information area | Megjeleníti a robot aktuális pozíciója szerinti területre beállított ütközés-érzékenységi értéket. |
9 | Force information area | Az Alap, Világ, Felhasználó és Referencia koordináta-rendszerekben található erőinformációkat jeleníti meg. A Referencia koordináta-rendszer erőadatokat jelenít meg a robotra alkalmazott koordinátarendszer-információk alapján. |
10 | Speed slider | Beállítja a robot sebességét valós vagy virtuális üzemmódban. |
11 | Stop button | Leállítja a jelenlegi feladatot. |
12 | Execute/pause toggle button | Végrehajtja vagy szünetelteti a munkát a feladatlistán. |
13 | Time | Megjeleníti az adott paranccsal/készséggel eltöltött időt. |

Vigyázat
- Mielőtt végrehajtaná a feladatot, először virtuális üzemmódban hajtsa végre és ellenőrizze, hogy a tervezett módon működik-e.
- A robotprogramot a másik gép munkaterén kívüli ideiglenes útpontok kijelölésével ajánlatos tesztelni. A Doosan Robotics nem felel programozási hiba vagy a robot hibás működése miatt bekövetkező károkért, valamint a berendezés károsodásáért.
- A vészleállító gomb a betanítóegységen van elhelyezve. Vészhelyzetben nyomja meg a vészleállító gombot a robot leállításához.
Erőnyomaték érzékelő nélküli modellek az erő (X, Y, Z) értékeket nem figyelik.