
Útpont beállítása
Parancs útpontjának konfigurálásához kövesse az alábbi lépéseket:
- Válassza ki a referencia koordináta típusát (Abszolút, Relatív) és a koordináta értékét.
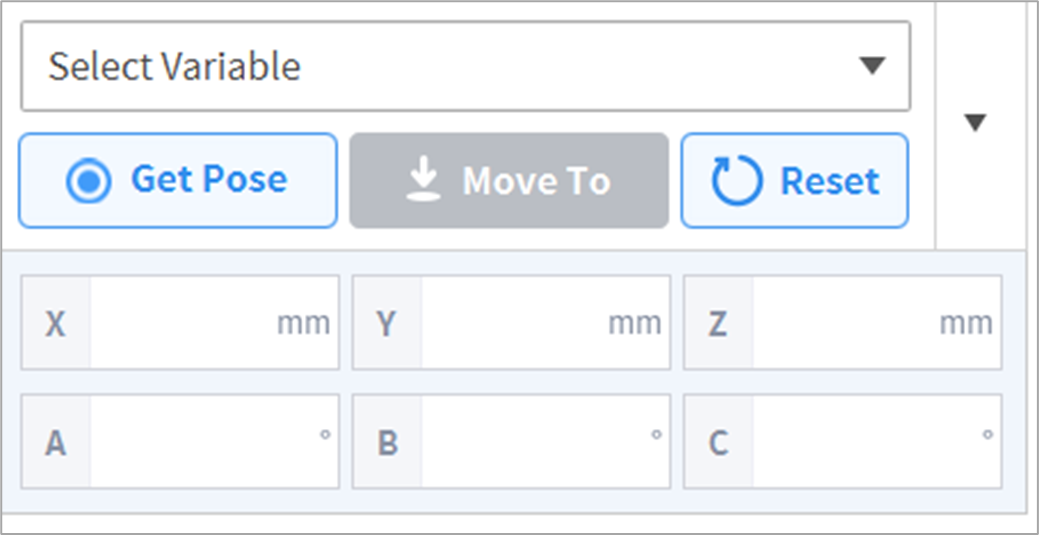
- Vagy használja a léptetés funkciót, vagy közvetlen tanítással vigye a robotot a kívánt pozícióba.
- Érintse meg a Póz mentése gombot a robot szerszám pozíciójának mentéséhez.
- Ha szükséges, definiáljon változót a GlobalVariables vagy a Define paranccsal.
- Ha szükséges, definiáljon változót a GlobalVariables vagy a Define paranccsal.