
Megfelelőség- és érintkezés-ellenőrzés
A Doosan Robotics egyedülálló erőszabályozási technológiájával működő megfelelőség- és érintkezés-ellenőrzési funkcióknak köszönhetően egyszerűen, a műveletek ismétlése nélkül is könnyedén elvégezhető a betanítás és a pontok precíz definiálása. A rendszer ugyanis meghatároz egy pozícióeltérési tűréshatárt a munkadarab és a környező elemek között a robot működése során.
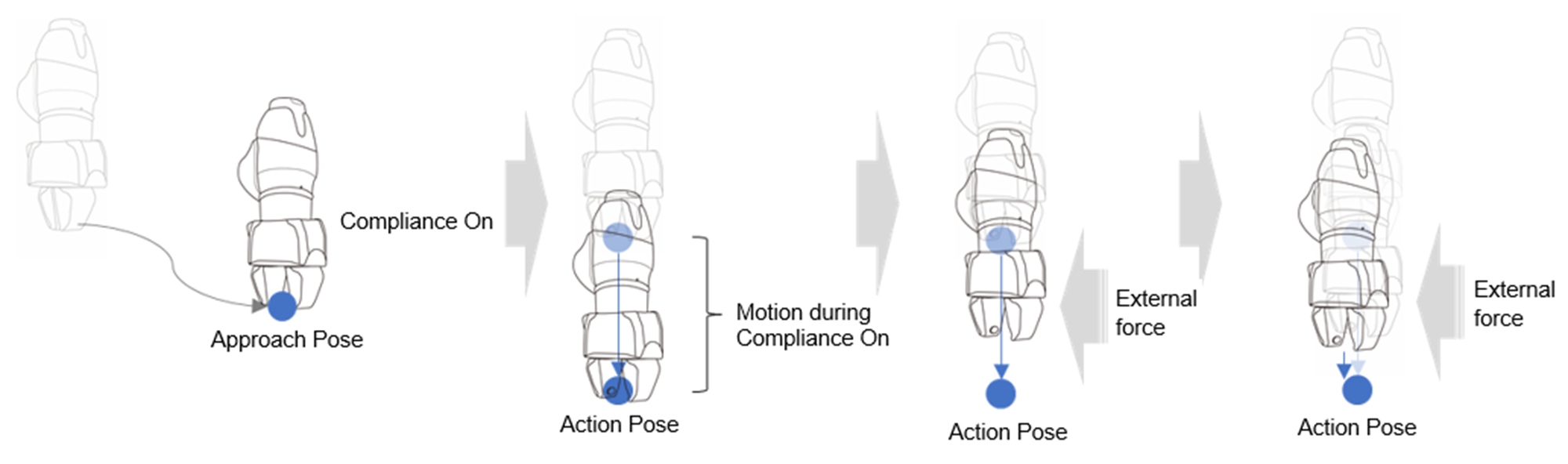
Megfelelőség-ellenőrzés: A Közelítés à, Művelet à és Visszahúzás során erőhatásra megengedi a kitérést a beállított pozícióból egy bizonyos szintű puffereléssel, amilyen egy rugó is.
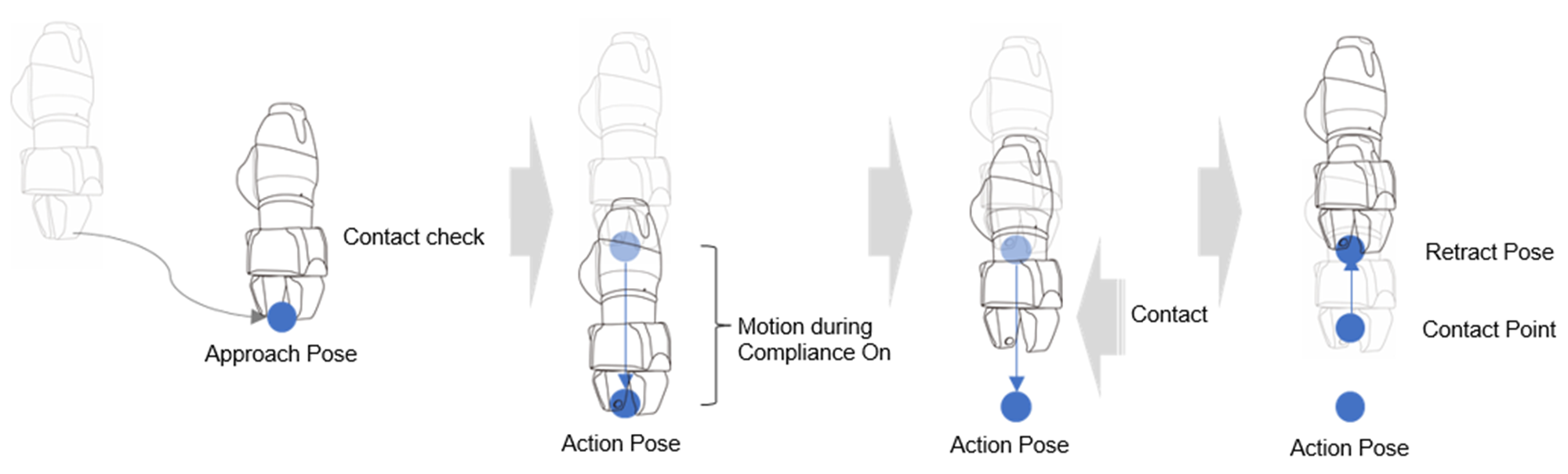
Érintkezés-ellenőrzés: A megadott Érintkezési erő és Érintkezés meghatározási tartomány értékek alapján a funkció érzékeli az érintkezést a céllal, leáll a megfelelő pozíciónál, majd aktiválja a megfogót, hogy megragadja a célt.
- Ezt a funkciót a Compliance Control (Megfelelőség-ellenőrzés) funkcióval kell használni. Ha Force van megadva és a Compliance Control (Megfelelőség-ellenőrzés) nincs engedélyezve, hiba történik.
- Az érintkezés-ellenőrzés funkció érzékeli a külső erőket, ezért az ütközésészlelés érzékenységét alacsonyra kell állítani, vagy teljesen le kell tiltani a funkciót.
- Legyen óvatos a funkció használatakor, mivel túlzott erők keletkezhetnek a külső környezettel való érintkezéskor, ha a Compliance Control (Megfelelőség-ellenőrzés) beállítás merevség (vagyis Z-irány) értéke túl nagy, vagy a munkasebesség túl nagy. (A módosításokat a helyzetnek megfelelően kell elvégezni: ha a munkavégzési sebesség túl nagy, csökkenteni kell a merevséget, ha pedig a munkavégzési sebesség túl kicsi, növelni kell a merevséget.)
Megjegyzés
- Ha az A sorozatot használja, és az FTS nincs telepítve, az érintkezésészlelési funkció nem használható. Ebben az esetben a megfelelőség-ellenőrzési funkció használata korlátolt, és a merevséget csak a transzlációs irányba (X, Y, Z) lehet használni.