Készségparancsok alapelveinek megértése
A készségparancsok néhány működési mintán alapulnak.
Ahhoz, hogy a robot megkezdje a működést, konfigurálni kell a robotra szerelt szerszám súlyát és a szerszámközéppontot (TCP). A készség alapvető működési mintája az, hogy van egy megközelítési pozíciója és egy visszahúzási pozíciója, amely merőleges a referencia-pozícióra.
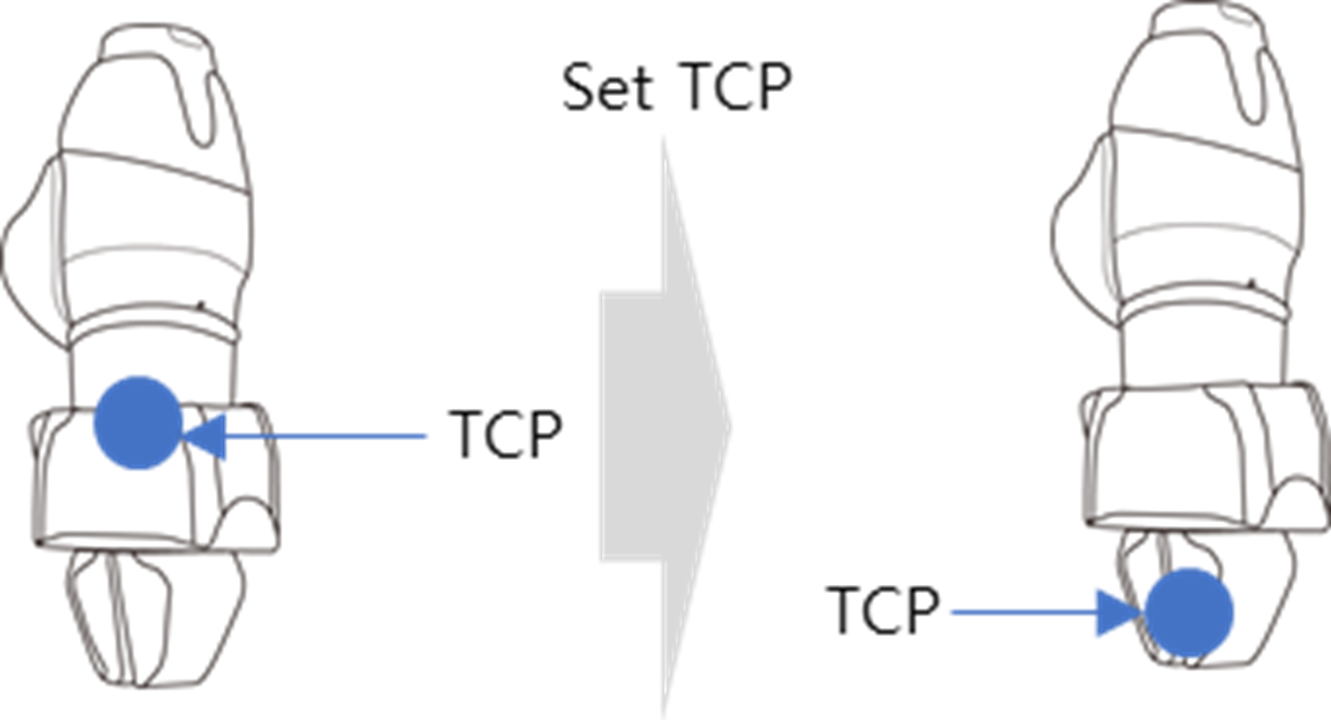
TCP beállítása: Végeffektor készségparancs használatával automatikusan változni fog a TCP eltolási beállítás. A végeffektor készségparancs végrehajtási szakasza magában foglalja a végeffektor TCP-hez megfelelő eltolás beállítást. Ha a TCP eltolása módosul, nem használható a Blending Motion (Simított mozgás) funkció, amely simítással köti össze az egymást követő mozgási parancsokat.
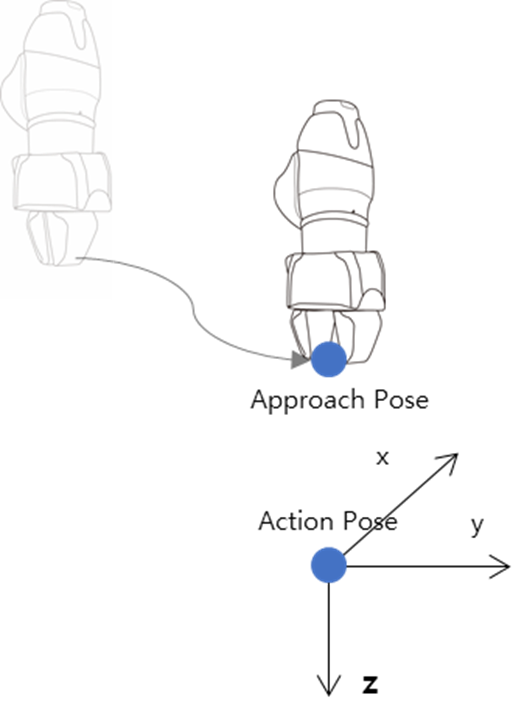
Mozgatás megközelítési pozícióba: Ez az a pont, ahol a robot a megközelítési pozícióba mozoghat. A megközelítési pozícióhoz képest Z irányba van beállítva, és különböző irány is kiválasztható. A munkavégzési pozíció alapján a rendszer automatikusan kiszámítja az Approach Distance (Megközelítési távolság) értéket, majd a megfelelő pontba mozgatja a robotot.
Mozgatás referencia-pozícióba: A végeffektor ebben a pozícióban végzi el a munkát a munkadarabon. A részletes koordináták készletéhez, leszámítva a gyorsaságot és a gyorsulást a
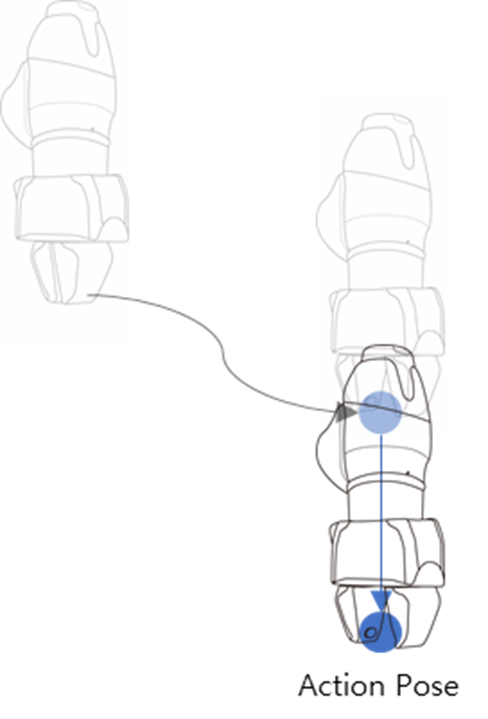
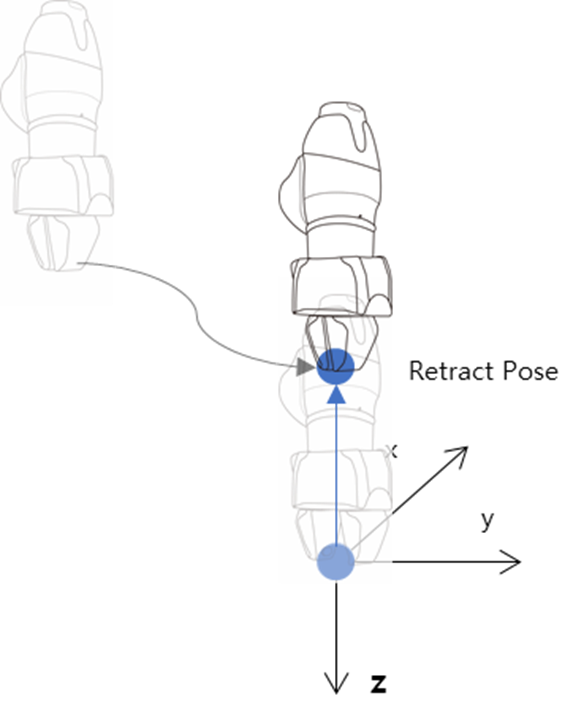
Mozgatás a visszahúzási pozícióba: A robot ebben a pozícióban veszi fel a munkadarabot, majd biztonságosan egy másik pozícióba mozgatja. A megközelítési pozícióhoz képest ez a Z irány, és különböző irány is kiválasztható. A munkavégzési pozíció alapján a rendszer automatikusan kiszámítja a Retract Distance (Visszahúzási távolság) értéket, majd a megfelelő pontba mozgatja a robotot.
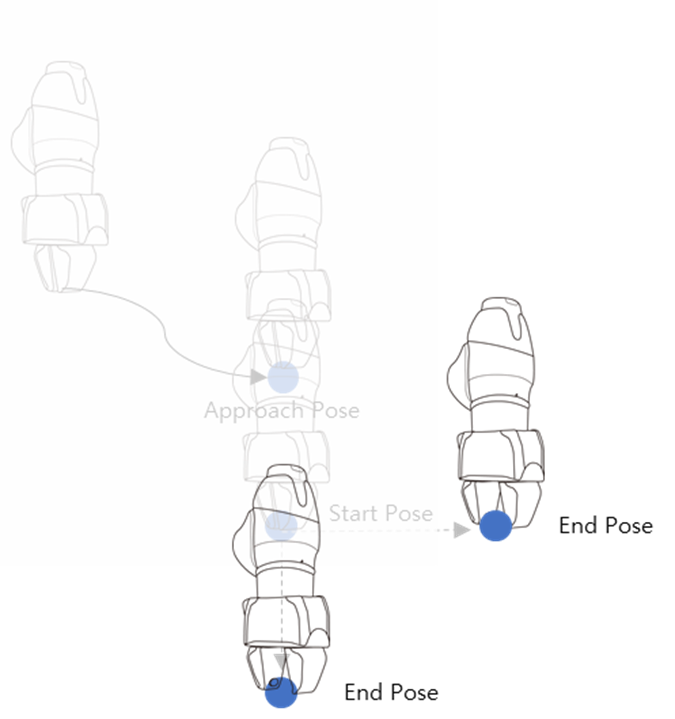
Mozgatás műveletkezdési pozícióba: Ha a végeffektor nem egyetlen mozdulattal hajtja végre a feladatot, elképzelhető, hogy köztes pont és végpont is létezik. A műveletkezdési pozíció az a pont, ahol a robot megkezdi a munkavégzést. (azaz: Door_OpenClose Skill (Ajtó_BeKi Kézség) – Start Pose (Indítási helyzet))
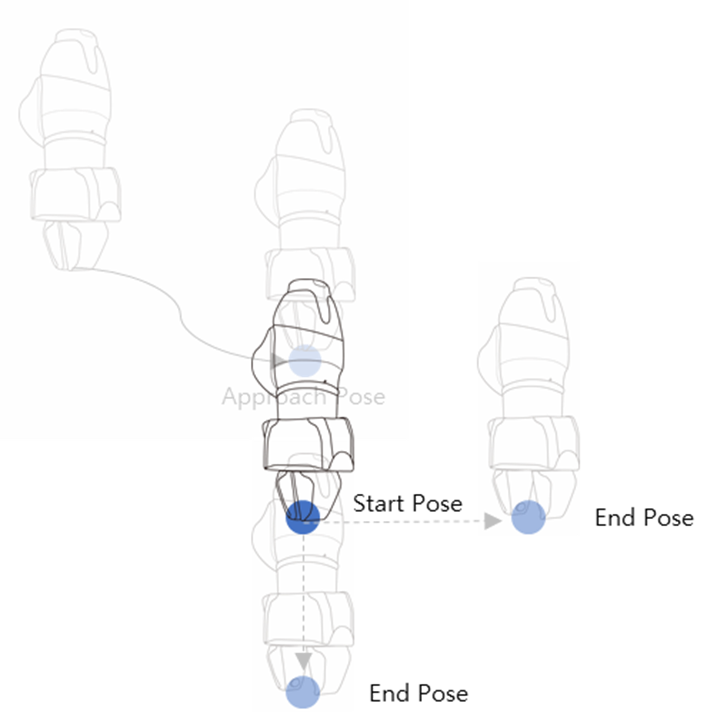
Mozgatás befejezési pozícióba: Ha a végeffektor nem egyetlen mozdulattal hajtja végre a feladatot, elképzelhető, hogy köztes pont és végpont is létezik. A műveletbefejezési pozíció az a pont, ahol a robot befejezi a munkavégzést. (azaz: Door_OpenClose Skill (Ajtó_BeKi Kézség) – End Pose (Befejezési helyzet))