Készség - Próbálja ki a minták behúzását és elhelyezését
OPCIONÁLIS NORMÁL 20 PERC
Ez a minta a Feladatszerkesztőn jön létre. A Feladatíró nem támogatja a készség funkciót.
Vigyázat
- Mielőtt megpróbálná a mintát, mindenképpen olvassa el és kövesse a következőt Használatra vonatkozó óvintézkedések: . További információkért lásd 1. RÉSZ. Biztonsági kézikönyv: .
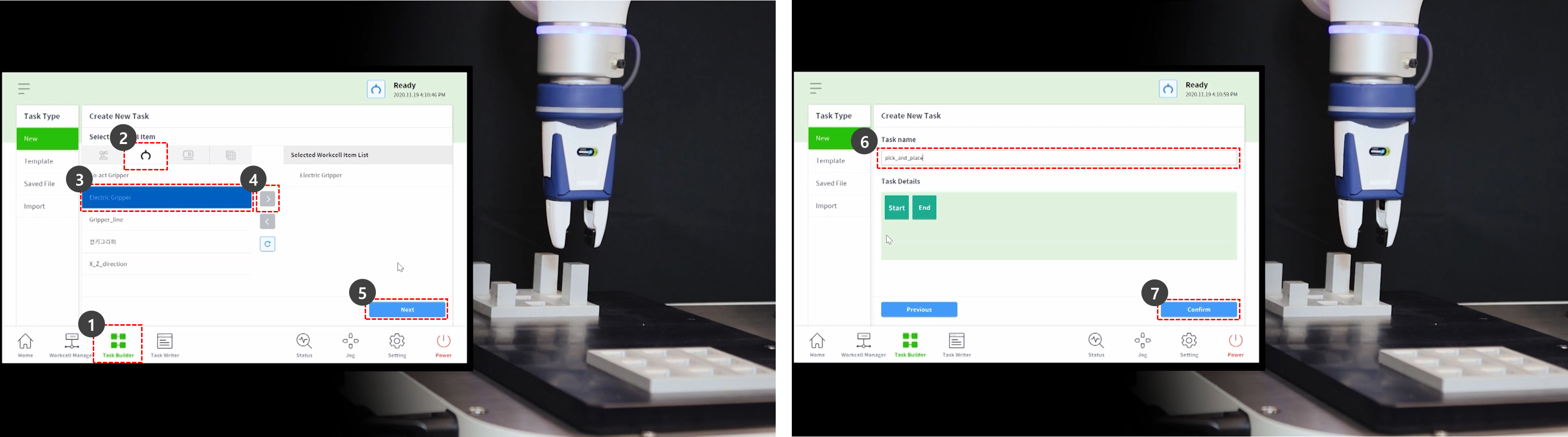
- Válassza ki a Feladatszerkesztést a lenti menüből.
- Válassza ki a Workcell Item > Gripper (munkaállomás elem kiválasztása > Gripper) ikont.
- Válassza ki a munkacella elemként regisztrált markoló elemet. Ez a minta nem kipróbálható, ha nincs regisztrálva befogó munkacella tételként.
- Nyomja meg a > gombot a Workcell elem kiválasztott munkacella elemként történő regisztrálásához.
- Nyomja meg a tovább gombot.
- Adja meg a feladat nevét.
- Nyomja meg a Megerősítés gombot.
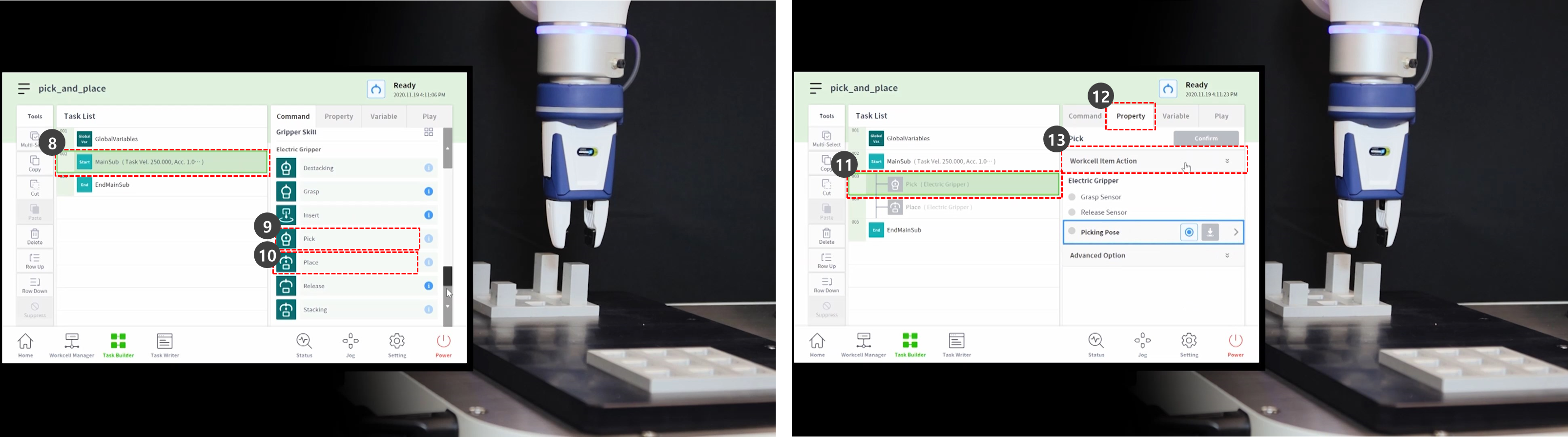
- Válassza ki a MainSub parancsot a feladatlista második sorában! Egy új parancs kerül a kiválasztott sor következő sorára.
- Adja hozzá a Pick skill parancsot.
- Add hozzá a place skill parancsot.
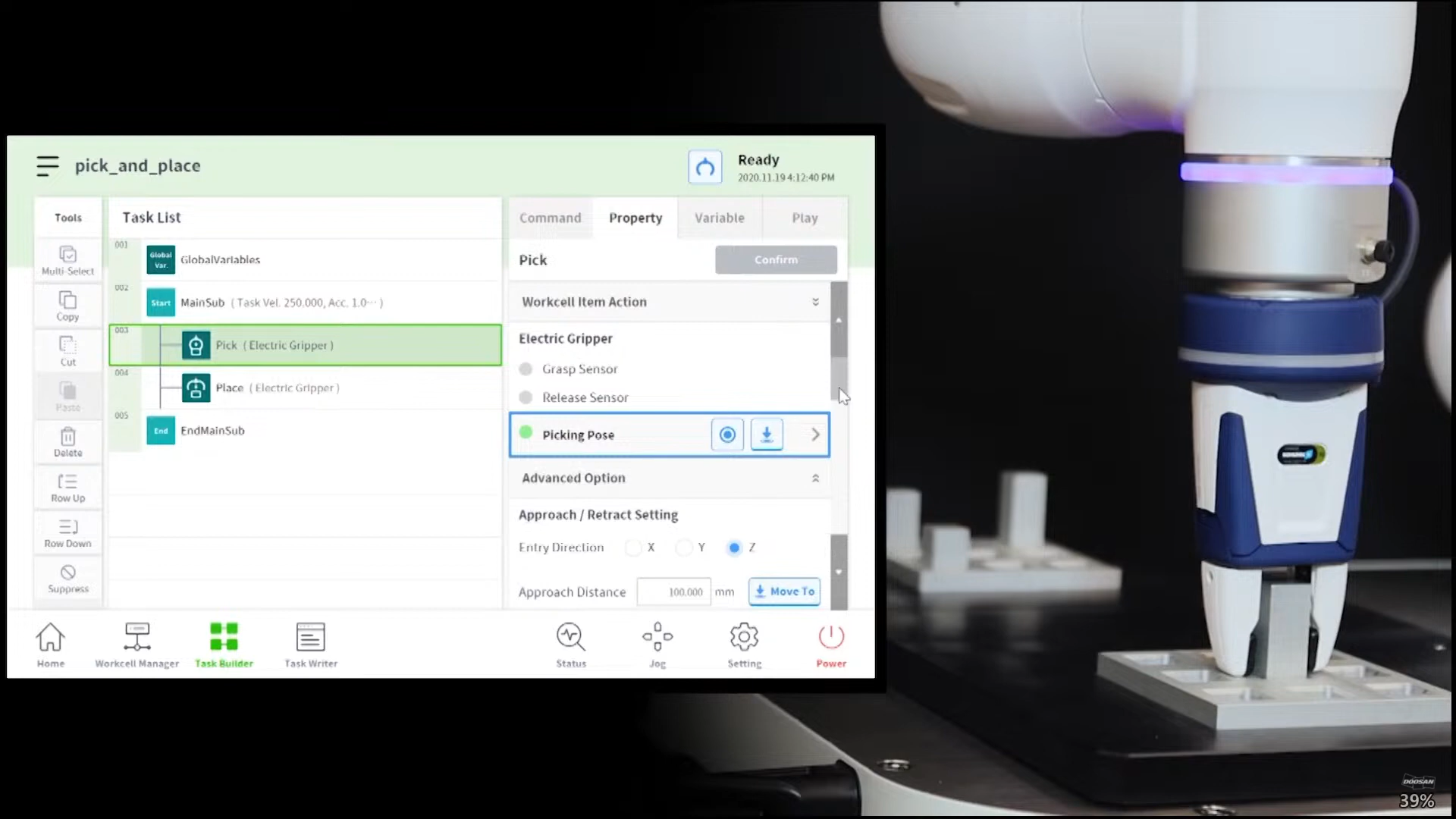
- Válassza ki a Válassz parancsot a feladatlista harmadik sorában.
- Válassza ki a tulajdonság lapot.
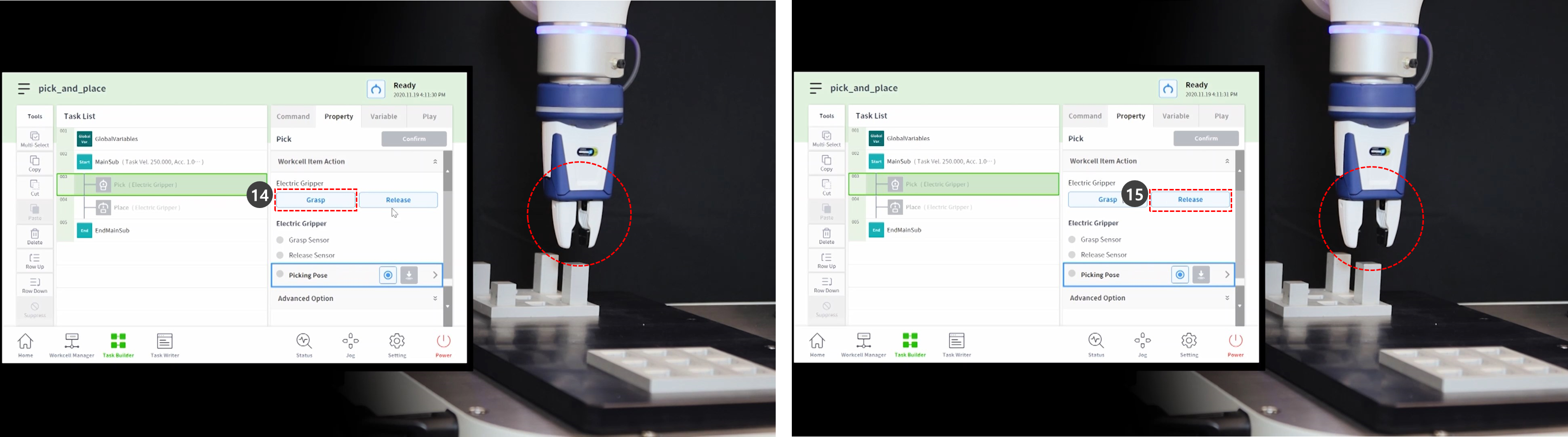
- A menü kibontásához nyomja meg a Workcell Item Action (Munkacella-elem művelet) gombot. Ha a befogó munkacella elem van kiválasztva, a befogó művelet tesztelhető a munkacella elem művelet közben.
- A markoló teszteléséhez nyomja meg a markoló gombot, és végezzen megfogja a mozgást.
- A markoló teszteléséhez nyomja meg a kioldógombot, és engedje el a mozgást.
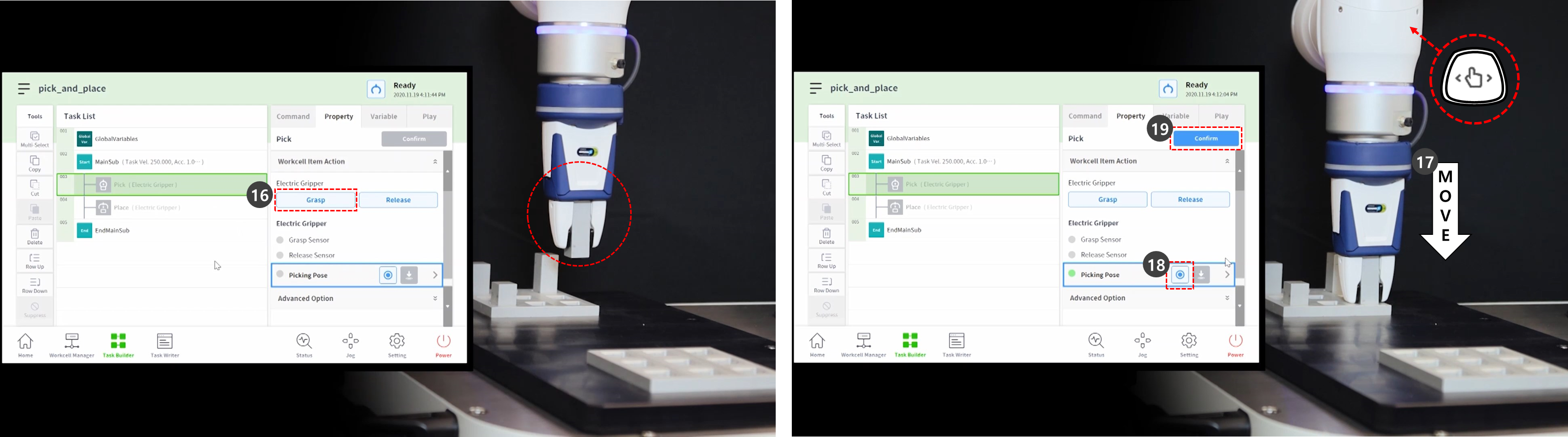
- Könnyű munkadarabok esetén helyezze a munkadarabot a markolóba, és nyomja meg a marás gombot, hogy a robot tartsa a munkadarabot. Az oktatás elvégzése a munkadarab befogása közben segíthet a pontos helyzet megteremtésében.
- Azonban nem kötelező, hogy a robot az oktatás során megtartsa a munkadarabot, csak egy példa.
- Nehéz munkadarabok esetén veszélyes helyzetek fordulhatnak elő, mivel a befogó elveszítheti a munkadarabot.
- Nehéz munkadarabok esetén a szerszámbeállítások szerszámsúlyának tartalmaznia kell a szerszám súlyát és a munkadarab súlyát.
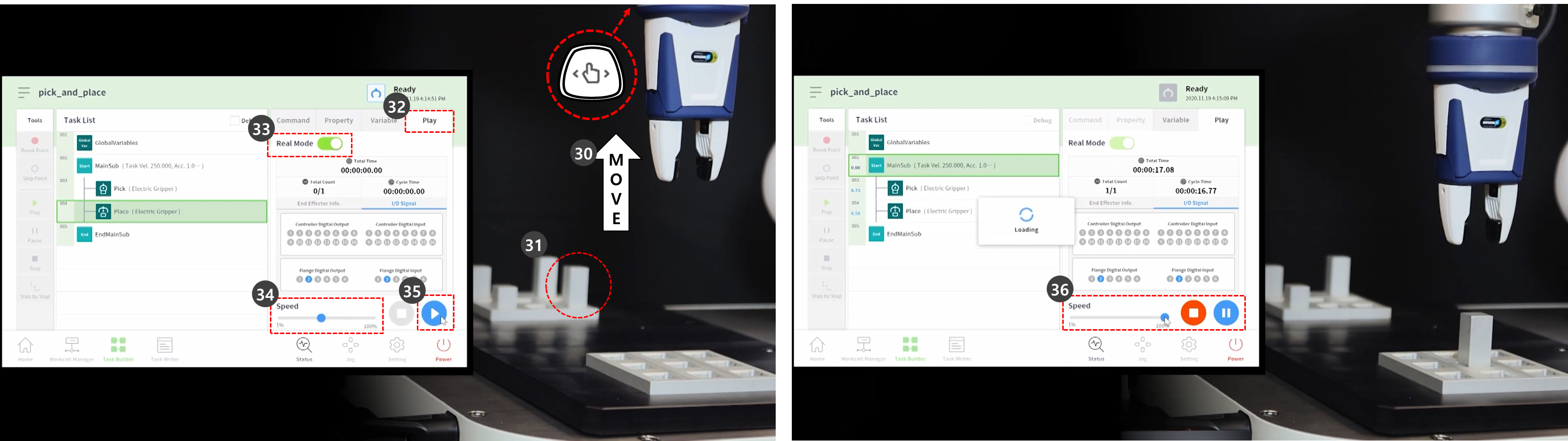
- A robotot a közvetlen tanítás segítségével vigye oda, ahol a Pick-et el fogják végezni.
- A robot mozgatásához nyomja meg és tartsa lenyomva a vezetőfülkében lévő kézi vezérlő gombot.
- Nyomja meg a póz Get Pose (Pose felírása) gombot.
- Nyomja meg a jóváhagyás gombot.
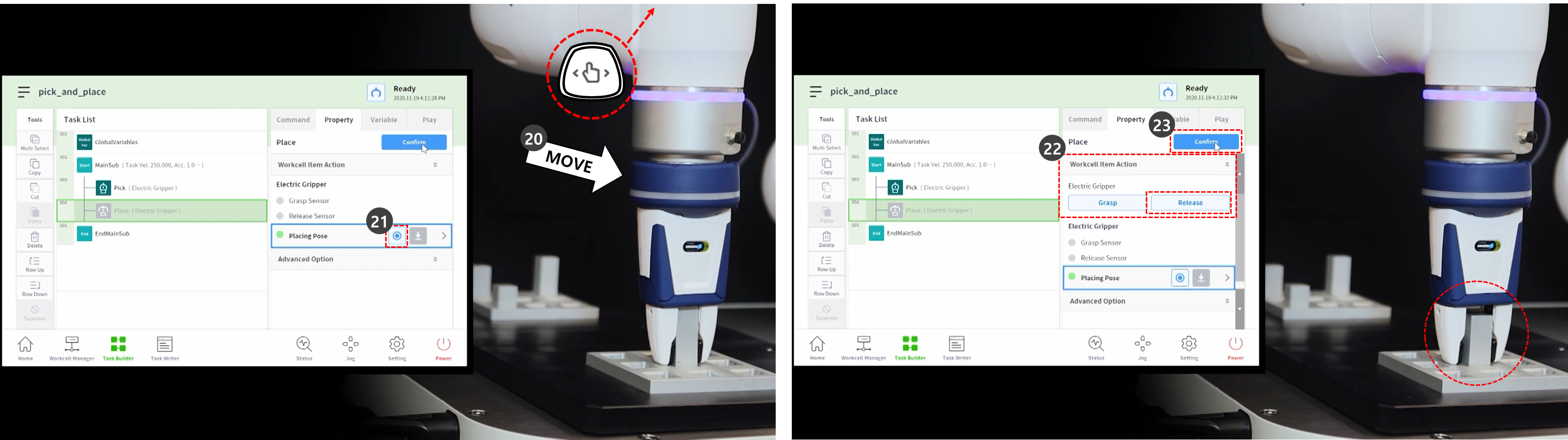
- Közvetlen oktatás segítségével vigye a robotot arra a pontra, ahol a helyet el fogja végezni.
- Nyomja meg a póz felírása gombot.
- A munkadarab befogóról való kioldásához nyomja meg a kioldógombot.
- Nyomja meg a jóváhagyás gombot.
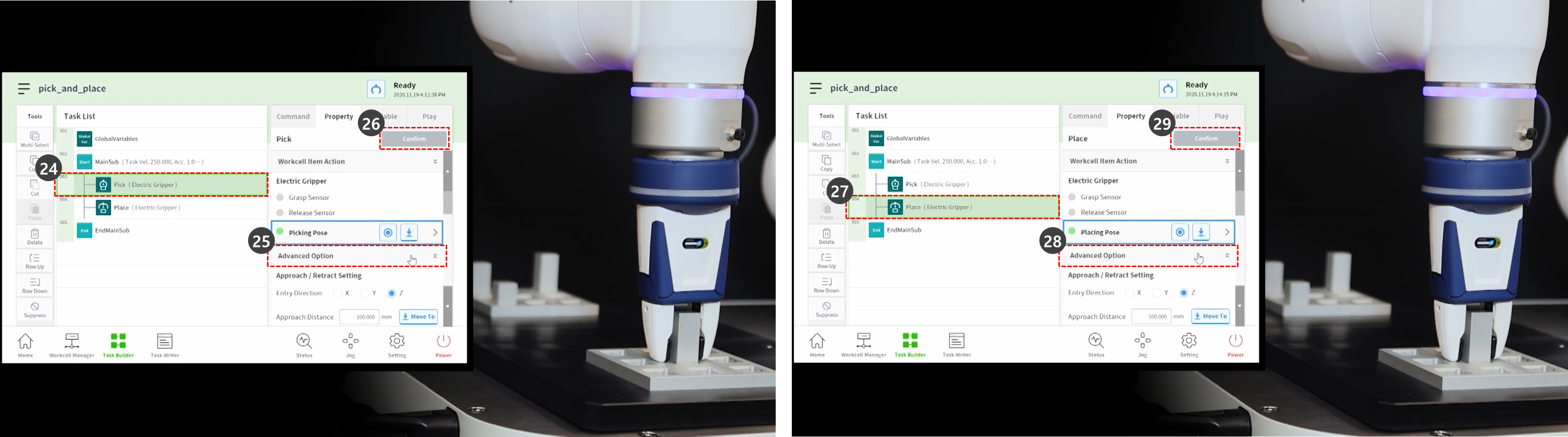
- A Pick and place skill parancsok részletes beállításainak megadásához válassza ki a Pick parancsot a feladatlista harmadik sorában.
- Nyomja meg a speciális opciót a menü kibontásához, és állítsa be a következők szerint: Használja az alapértelmezett értékeket az alább nem ismertetett elemekhez.
- Belépési irány: Z-tengely
- Beállítja a Pick pozícióba való belépés irányát.
- Megközelítési távolság: 100 mm
- Beállítja a távolságot, mielőtt a robot megközelíti a Pick pozíciót. Megfelelő távolságot biztosít a megközelítéshez.
- Visszahúzási távolság: 100 mm
- Beállítja a távolságot, miután a robot visszahúzódik a beállított irányba a Pick pozíciótól. Megfelelő visszahúzási távolságot biztosít.
- Megközelítési sebesség: 100 mm/s
- A megközelítési sebességet az alapértelmezett értéknél kisebbre állítja, amikor a robot megközelít egy objektumot.
- Megfelelőség-ellenőrzés: Engedélyezve (zöld)
- Érzékelő érintkező: Engedélyezve (zöld)
- Lehetővé teszi a compliance Control és a kontaktus-észlelési funkciókat.
- Érintkezési erő: 10N
- Érintkezési tűréshatár: 10 mm
- Erő: 15 N
- Karcolás-eltolás: 2 mm
- Kiszedés előtt engedje el a befogó: Engedélyezve (zöld)
- A markoló kioldási állapotba kerül, mielőtt megközelíti a behúzási helyet.
- Szerszám súlya: Nincs
- Ha a munkadarab nem könnyű, a munkadarab súlyát és a szerszám súlyát összegezni kell, a szerszámsúly munkacellaként kell hozzáadni, és ki kell választani.
- Belépési irány: Z-tengely
- Nyomja meg a jóváhagyás gombot.
- Válassza ki a Place parancsot a feladatlista negyedik sorában.
- Nyomja meg a speciális opciót a menü kibontásához, és állítsa be a következők szerint: Használja az alapértelmezett értékeket az alább nem ismertetett elemekhez.
- Belépési irány: Z-tengely
- Megközelítési távolság: 100 mm
- Visszahúzási távolság: 100 mm
- Megközelítési sebesség: 100 mm/s
- Megfelelőség-ellenőrzés: Engedélyezve (zöld)
- Érzékelő érintkező: Engedélyezve (zöld)
- Lehetővé teszi a compliance Control és a kontaktus-észlelési funkciókat.
- Érintkezési erő: 10N
- Érintkezési tűréshatár: 10 mm
- Erő: 15 N
- Szerszám súlya: Nincs
- Nyomja meg a jóváhagyás gombot.
- A közvetlen tanítás segítségével vigye a robotot arra a pontra, ahol a Pick&Place elindul.
- Mozgassa a munkadarabot a Pick (kiszedő) helyre.
- Válassza a Lejátszás fület.
- Engedélyezze a Real Mode (valós mód) váltógombot.
- Állítsa a sebességbeállító csúszkát 10-30%-ra.
- Ez a sebességcsúszka az összes parancs beállított sebességét a kiválasztott % értékre állítja.
- Ha egy feladatot a létrehozást követően először hajtanak végre, kis sebességgel történő végrehajtása megakadályozhatja a váratlan kockázatokat.
- Nyomja meg a lejátszás gombot.
- Ha a feladat gond nélkül befejeződött, állítsa vissza a sebességet az alapértelmezett értékre, 100%-ra, és próbálja újra.