
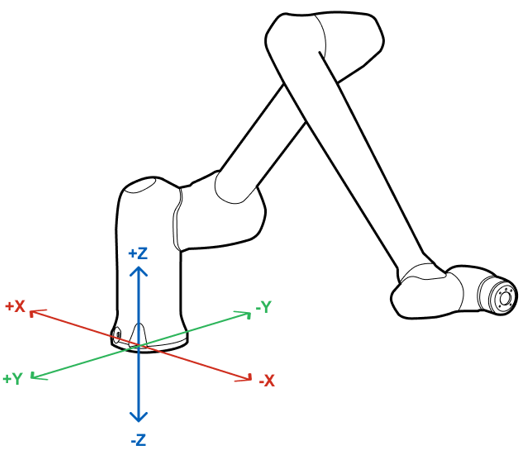
Végrehajtás robot alap alapján
A robot mozgatásához robot alap alapján, kövesse az alábbi lépéseket:
Válassza ki a Feladat fület a Léptetés képernyőn.
Válassza ki az alapként használandó megjelenő koordinátákat, és válassza ki az Alap beállítást a feladat koordinátáinak referenciapontjaként.
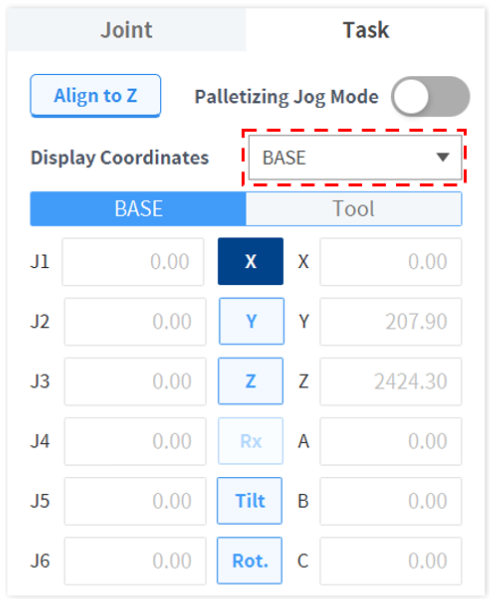
Válassza ki az Alap koordinátákat a mozgatáshoz. (P sorozatú modelleknél az Rx inaktív)
Nyomja meg és tartsa lenyomva az Irány gombot(


Megjegyzés
A biztonsági terület nem érvényes virtuális üzemmódban.