Mi az Euler Angle A, B, C?
Az Euler Angle (Euler szög) az X, Y és Z tengely szögeinek kifejezésére szolgál, amelyek egymás között az objektum irányába merőlegesek. Az a, B és C a szekvenciális elfordulási szögekre vonatkozik. Minden robotgyártó másképp határozza meg ezt Az A, B és C forgási sorrendet, mint például az RZ-ry-Rx vagy az Rx-ry-RZ.
A Doosan robotika RZ-ry-RZ-t használ . Itt az RZ a Z-tengely forgását jelenti , az ry pedig az Y-tengely forgását jelenti. Az RZ az a szögként, a B szögként, az RZ pedig a C szögként fejezhető ki az objektum aktuális forgásirányának jelzésére. Ne feledje, hogy ha a forgatás Z-tengely irányban történik a koordinátáktól, a forgatás új koordináták alapján történik.
Ez a 1–4. Lépésben jeleníthető meg.
Tételezzük fel, hogy koordináták vannak (X, Y, Z).
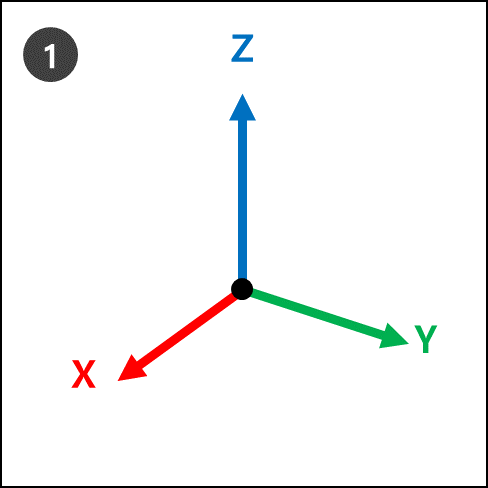
RZ: Forgassa el a Z-tengelytől egy fokkal.
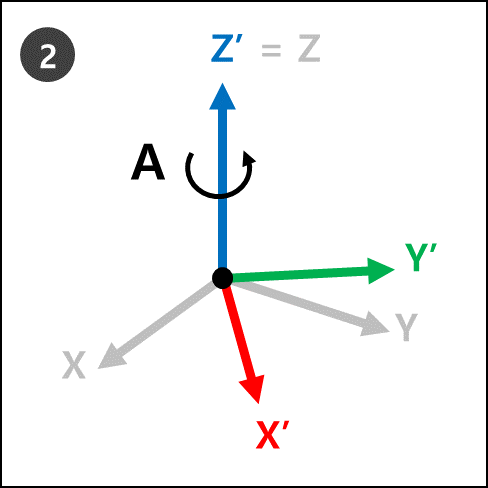
Ry : A 2. Lépésben az új koordináták (X’, Y’, Z’) új Y-tengelyétől (Y’) B fokkal elfordul.
RZ : A 3. Lépésben az új koordináták (X’, Y’’, Z’) új Z-tengelyétől (Z’’) C fokkal elfordul.
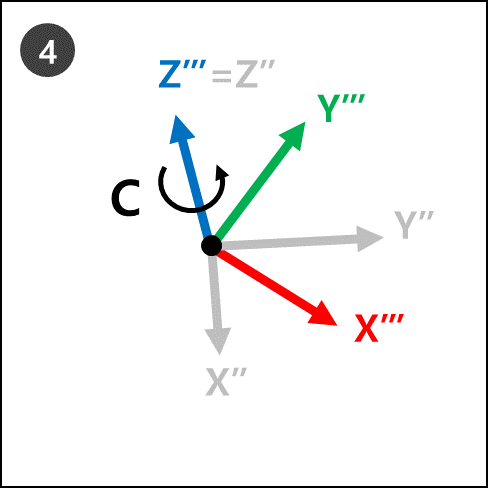
A 4. Lépés új koordinátái (Z’’’, Y’’’’’, X’’’’’ a robot aktuális forgására utalnak, amikor az Euler a, B és C szögeit alkalmazzák.
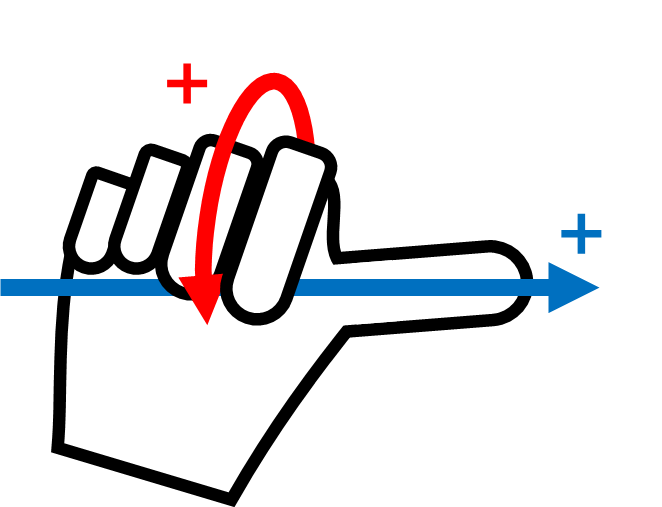
Ez jól látható a jobb kezével. Tegye a következő pózba a jobb kezével. Ezt nevezik jobb oldali szabálynak, és ha a hüvelykujj (X-tengely), mutatóujj (Y-tengely) és középső ujj (Z-tengely) egymásra merőlegesen áll, akkor X, Y és Z tengelyekből álló koordinátákat hoz létre.
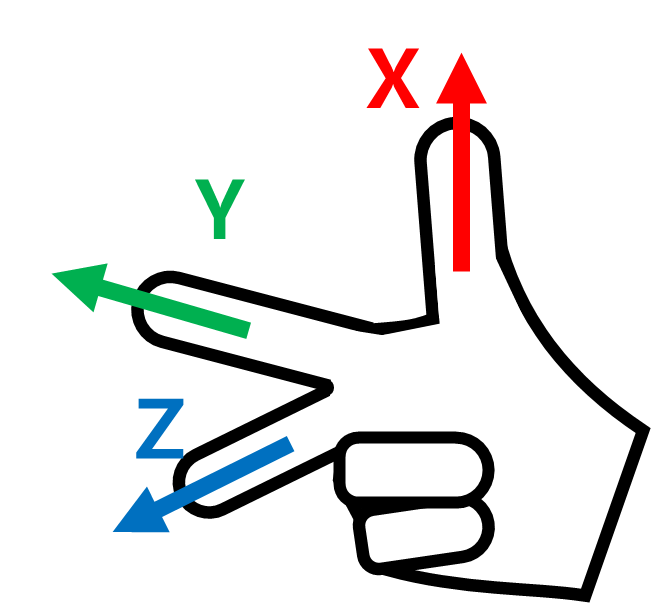
Ezután a jobb oldali szabály Cartesian pose és a forgatás RZ, ry és RZ sorrendben.
RZ: Forgassa el a középső ujját (Z-tengely) fokkal.
Ry (száraz): Forgassa el a mutatóujját (Y-tengely) B fokkal.
RZ: Forgassa el a középső ujját (Z-tengely) C fokkal.
Megjegyzés
Az A, B és C + forgásiránya négy ujj iránya, kivéve a hüvelykujj irányát, amikor a hüvelykujj a + irányba mutat, és a négy ujj összeszorul. Ezt nevezzük törvény az óramutató járásával megegyező csavar.