A megfelelőség/erőszabályozás megértése
OPCIONÁLIS KEMÉNY 20 PERC
Az erőszabályozás és a compliance vezérlés a roboterőt vezérlő funkciók. Ezek a funkciók mozgásmozgás és erőszabályozás végzését is vezérlik, ha egy mozgási parancsot adnak hozzá. A megfelelőség ellenőrzése és az erőszabályozás a következő különbségekkel rendelkezik:
- A megfelelőség ellenőrzése
- A robot megfelel a külső erőnek a robot végén lévő TCP-nél a megfelelőség ellenőrzése során, és amikor a külső erőt eltávolítják, egy erő jön létre, amely visszaállítja a robotot az eredeti helyzetébe, így a robot a megfelelő helyzetbe kerül.
- Akkor használható, ha egyenetlen felületen lineáris mozgásra van szükség a robot és a felület károsítása nélkül. A munkadarab körüli váratlan ütközések megelőzésére használható.
- Erőszabályozás
- Az erőszabályozás során erő keletkezik a robot végén lévő TCP-nél. A gyorsulás az erő generálása irányában jön létre, így a robot egyszerre mozog a mozgás irányába és az erő irányába.
- Amikor egy tárgyhoz kerül az érintkezés, erőt kell kifejteni az objektumra, amíg a beállított erő és a tárgy taszító ereje egyensúlyt nem képez.
- Akkor használható, ha egyenlő erőt kell alkalmazni lineáris mozgásra egyenetlen felületen. Olyan feladatokhoz használható, amelyek mozgás közben állandó erőt igényelnek, például polírozáshoz.
Megjegyzés
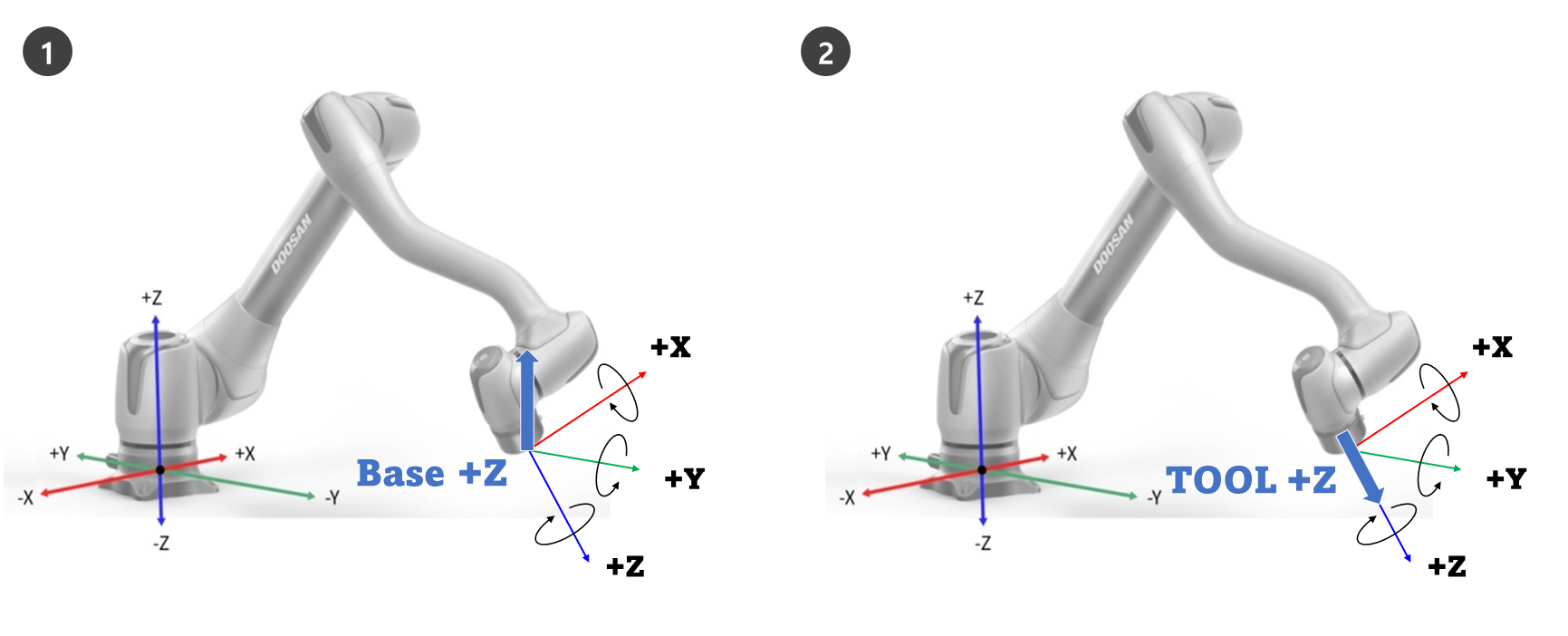
A compliance és Force parancsok végrehajtása az aktuális koordináták alapján történik. A feladat alapértelmezett koordinátája az alapkoordináták, és a koordináták a SET paranccsal módosíthatók.
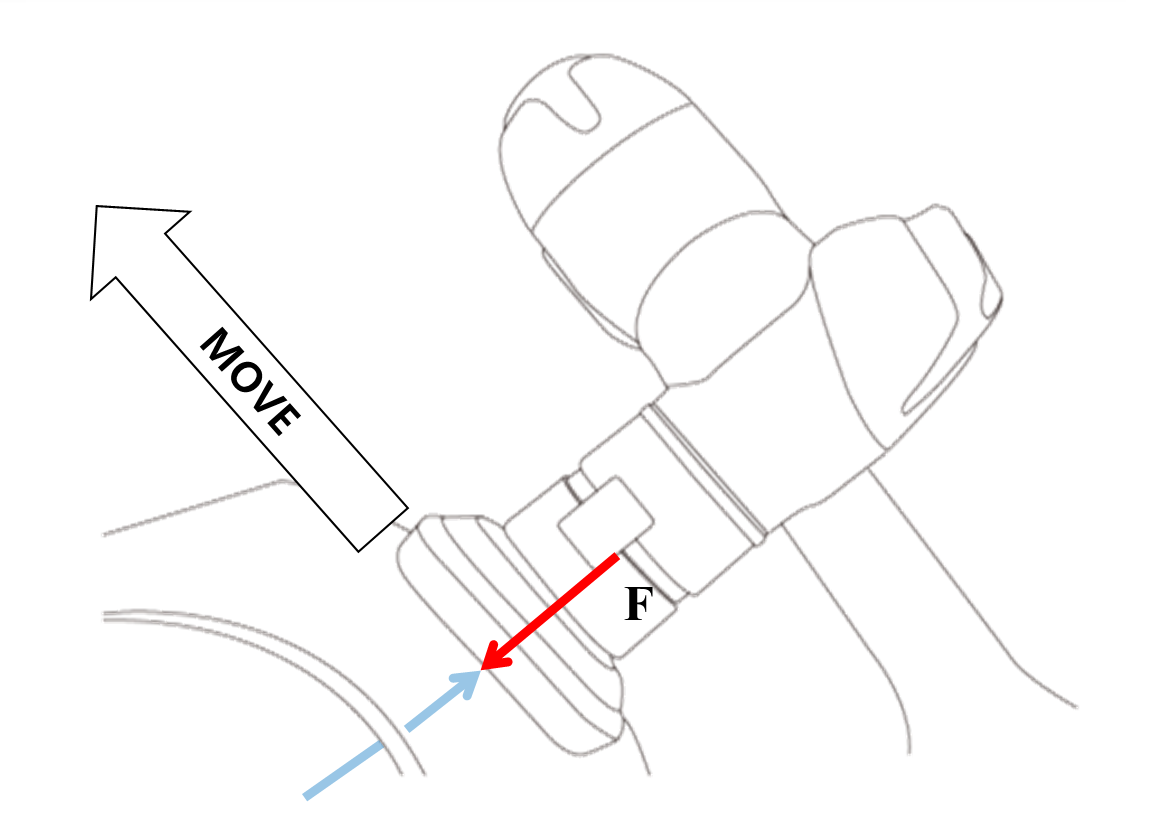
- Ábra 1 a működési irány, ha az erő/megfelelőség ellenőrzése +Z irányban történik az alapkoordinátákon.
- Ábra 2 a működési irány, amikor a szerszám koordinátáin erő/megfelelőség ellenőrzést alkalmaznak +Z irányban.
Megfelelőség-ellenőrzés

A compliance Control az a funkció, amely megfelel a külső erőnek a beállított merevségnek, amikor erőt alkalmaznak a robot végén lévő TCP-n. Az erők kiegyensúlyozása a célponton, és ez egy olyan ellenőrzési módszer, amely taszító erőt generál, ha az elmozdulás a kiegyensúlyozási ponttól távolodik el. A megfelelőség ellenőrzése során a robot vége ugrál, mint egy rugó.
- Ha csak a mozgásvezérlés használatakor ütközés történik, előfordulhat, hogy az ütköző tárgy megsérülhet.
- A Doosan Robotics robotok ütközés esetén biztonságosan megállnak, de a felhasználói beállításoktól függően, mintpéldául a biztonsági határértékek > ütközési érzékenység,a következő helyzetek fordulhatnak elő.
- Ha a mozgásvezérlés közben a compliance-szabályozás be van kapcsolva, a robot az ütköző tárgynak való megfelelés közben mozog.
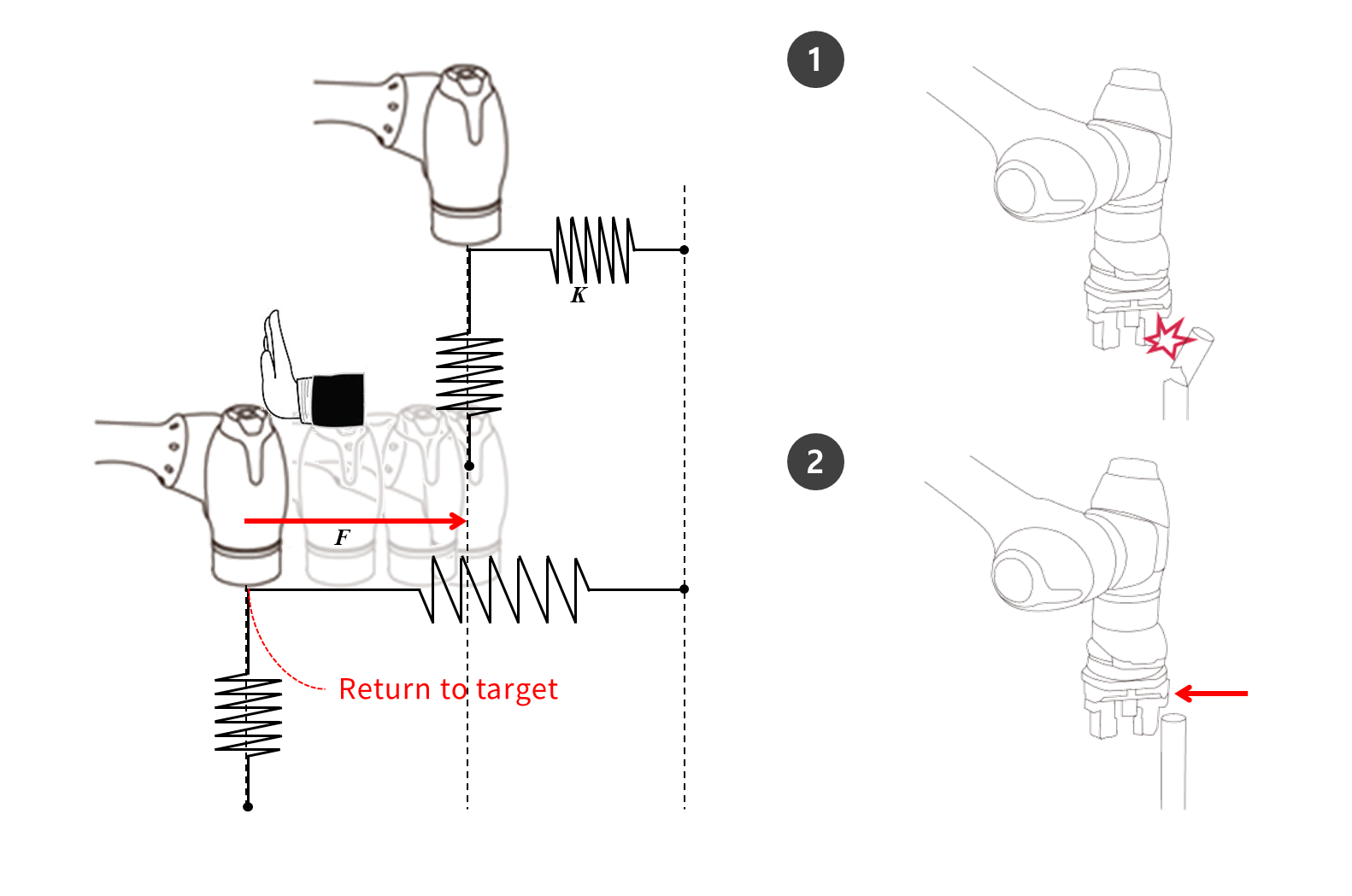
Ha az F külső erő, a K a merevség és az X a távolság, a következő képletek igazak.
- F = K * X
- K = F / X
- X = F / K
A fenti képletek alapján, ha a compliance-szabályozás merevsége 1000 N/m-re van állítva, és ha a robot 1 mm-t mozog, a keletkező külső erő 1N.
- F=1000 N/m*0.001 m=1 N (0.001 m=1 mm)
Megjegyzés
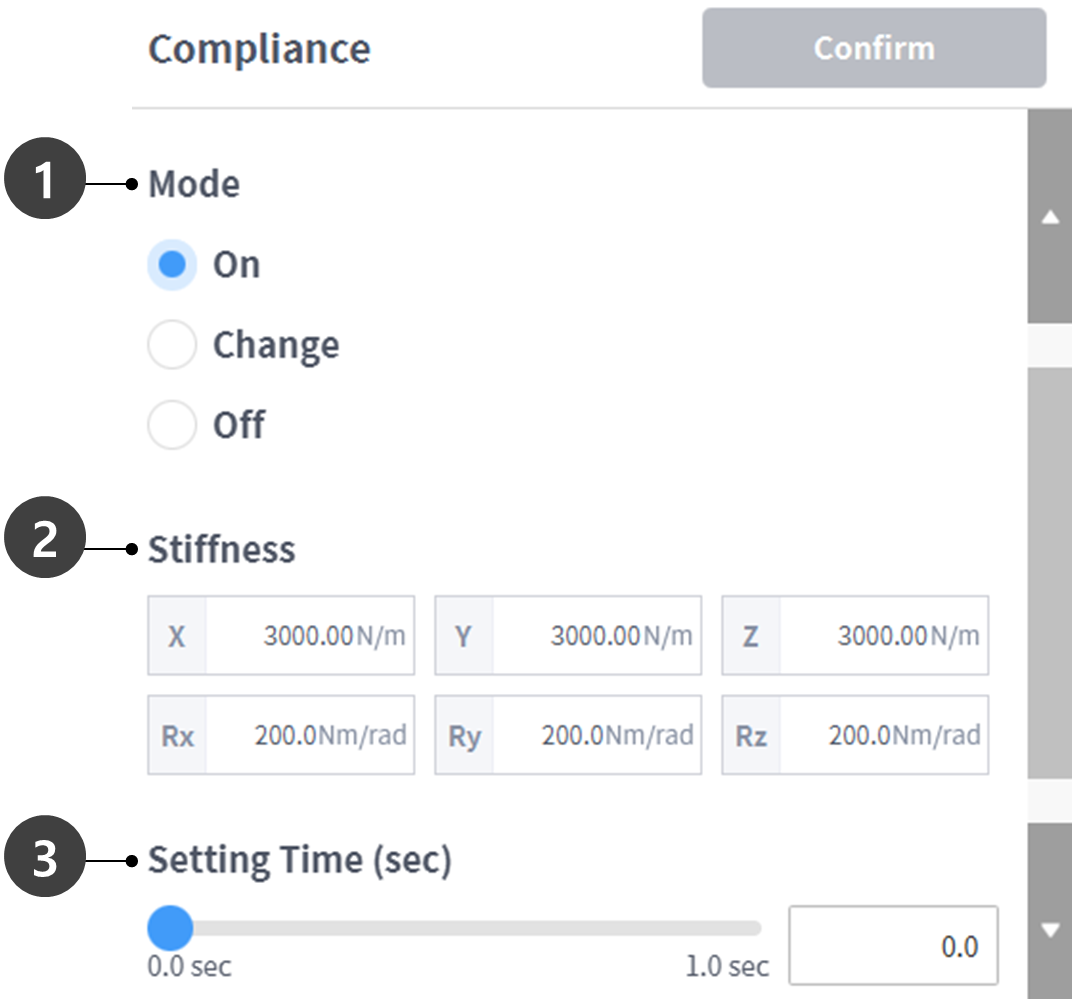
A Property of Compliance parancson a következő értékek állíthatóak be:
- Mode (üzemmód)
- Be: Lehetővé teszi a megfelelőség ellenőrzését
- Módosítás: Ha a megfelelőségi mód be van kapcsolva, akkor merevségre vált
- Ki: Letiltja a megfelelőség ellenőrzését
- Merevségi tartomány
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Az alacsonyabb merevségi értékek kíméletesebben reagálnak a külső erőre, és több időre van szükség a célponthoz való visszatéréshez
- Idő beállítása
- Az aktuális merevségi érték eléréséhez szükséges idő (0-1S)
Vigyázat
- A szerszám súlyát és a TCP-t (Tool Center Point) pontosan be kell állítani. A szerszám pontatlan súlya miatt a robot külső erőként érzékelheti a szerszám súlyát, és ha a compliance (megfelelőségi) parancsot be állítja, az helyzethibát generál.
- A ruha csomag feszültsége külső nyomatékot generálhat a roboton. Ezért legyen óvatos, amikor telepíti a ruha csomagot.
- A compliance nem kapcsolható be és ki az aszinkron mozgás vagy keverési mozgás végrehajtása közben.
- A compliance parancs bekapcsolása alatt csak lineáris mozgás engedélyezett. Közös mozgások, mint például a MoveJ és a MoveSJ, nem engedélyezettek.
- A(z) compliance parancson a(z) eszköz súlya vagy a TCP nem módosítható.
- A compliance parancs bekapcsolása során a mozgási végrehajtás során keletkező nyomaték megfelelősége miatt nem lehet pontosan elérni a célpontot. Ezért javasolt a célpont közelében bekapcsolni a megfelelőség ellenőrzését. Vagy, lehetséges, hogy minimalizálja pozíció hiba beállításával nagy merevségi érték.
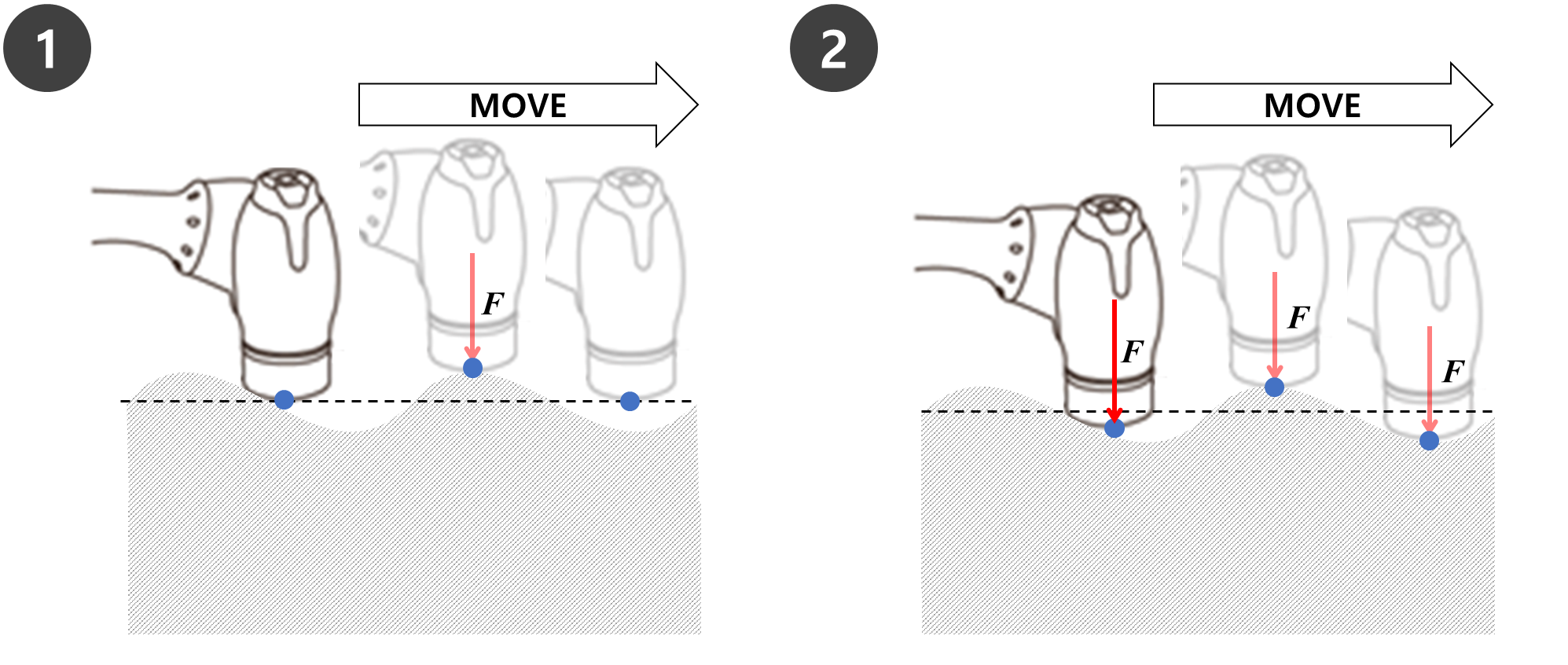
Erőszabályozás

Az erőszabályozás olyan funkció, amely erőt alkalmaz az erőszabályozás irányában, amíg a beállított erő és a taszító erő egyensúlyt nem alkot
- A robotot a beállított erőirányba mozgatja, és ha valamilyen tárgyhoz ér, megtartja a megadott erőt (N)
- Állandó erő alkalmazása mellett képes az erőiránytól eltérő irányba történő mozgásvezérlésre
- A minimális beállítás +/- 10N, és 0,2N felbontással finomítható
- Az erőszabályozás nem érhető el a szingularitás zónában
- A megfelelőség-ellenőrzést általában az erőszabályozással együtt használják, hogy az erőszabályozás megfeleljen a külső erőnek
Megjegyzés
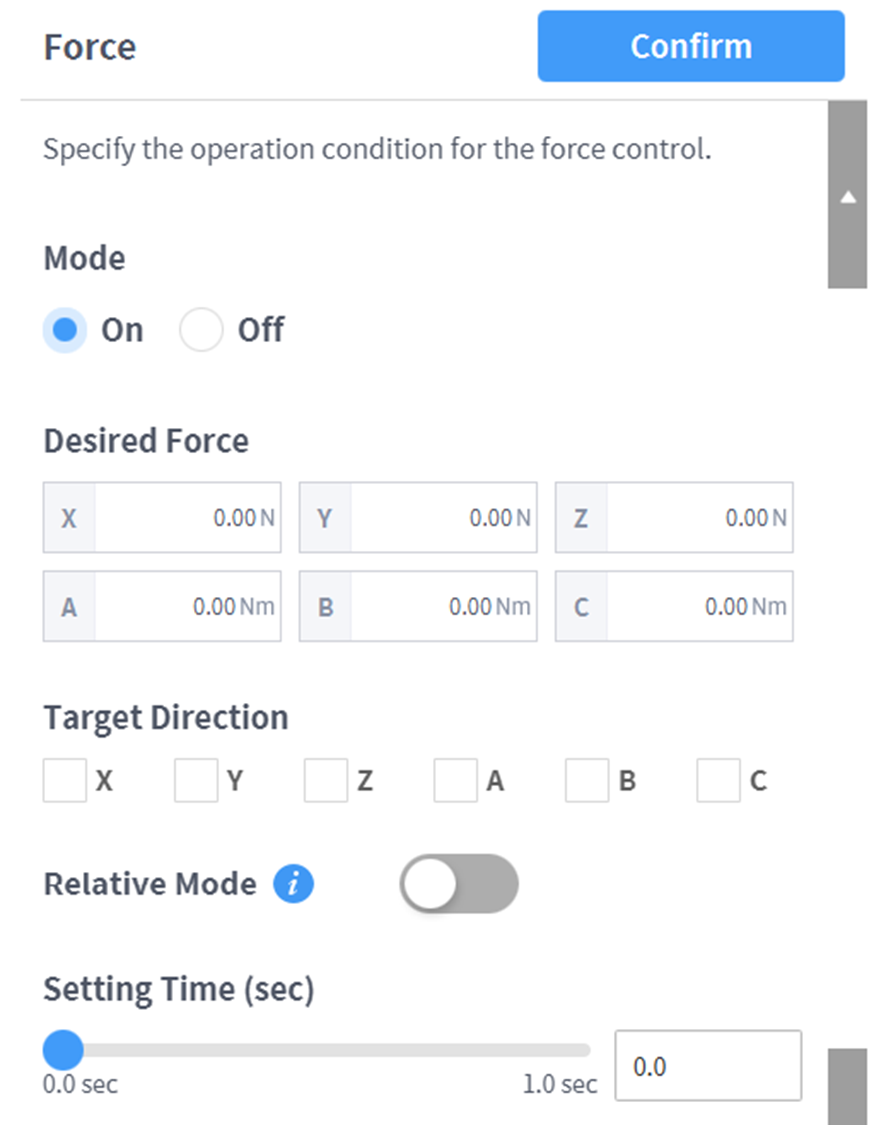
A Force parancs tulajdonságából a következő értékek állíthatóak be.
- Mode (üzemmód)
- Be: Az erőszabályozás engedélyezése
- Ki: Letiltja a kényszerített vezérlést
- Kívánt erőtartomány
- X, Y, Z: 10 - (minden robot maximális) N
- A, B, C: 5 - (minden robot maximális) Nm
- A maximális erővel kapcsolatos további információkért lásd (2.11.0.1_temp-hu_HU) Biztonsági paraméterek felső/alsó küszöb tartományai és alapértelmezett értékei: .
- Célirány
- Az egyes irányokhoz tartozó kiválasztott célértékre áll be.
- Több lehetőség is választható.
- Az erőszabályozás csak az erőbeállítás után hajtható végre az irány beállításával.
- Ha a több kiválasztott irány egyike eléri a célerőt, akkor tovább halad, amíg el nem éri a célértéket a másik irányba.
- Relatív mód
- Ha ez az üzemmód be van kapcsolva, kalibrálja a robotra kifejtett külső erőt 0-ra az erőszabályozás pontosságának javítása érdekében.
- Ha a relatív üzemmód le van tiltva, a céltárgyra ható tényleges erő megegyezik a beállított erő és a külső erő összegével.
- Ha a relatív mód be van kapcsolva, a célon alkalmazott tényleges erő megegyezik a beállított erővel.
- Az erőszabályozás során eltérés léphet fel a póztól vagy a külső erőtől függően.
- Az erőszabályozás során nem lehet elérni a pontos célpontot. Ezért javasolt az erőszabályozás engedélyezése a célpont közelében.
- Ha ez az üzemmód be van kapcsolva, kalibrálja a robotra kifejtett külső erőt 0-ra az erőszabályozás pontosságának javítása érdekében.
- Idő beállítása
- Ez az idő szükséges ahhoz, hogy az aktuális erőérték elérje a beállított erőértéket (0-1S)