
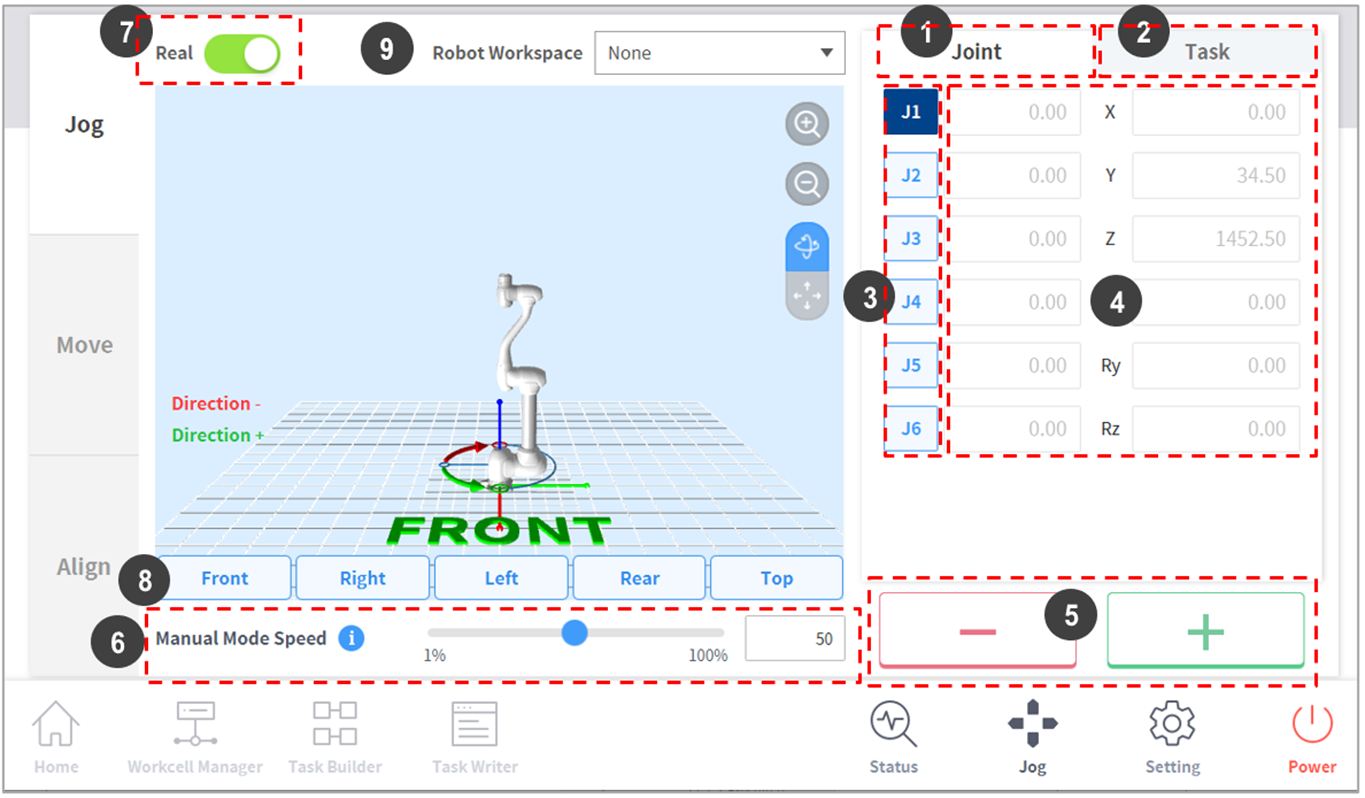
Léptetés képernyő
A robot a léptetés képernyőn a jelenlegi pozíciója alapján navigálható
Sz. | Elem | Leírás |
|---|---|---|
1 | Joint | A csuklót konfigurálja a léptetés üzemmód referencia koordinátájának. |
2 | Task | A feladatot konfigurálja a léptetés üzemmód referencia koordinátájánka. |
3 | Select Axis | Válassza ki a léptetés módban mozgatni kívánt tengelyt.
|
4 | Coordinate Display | A jelenleg Léptetésüzemmódban működtetett robot koordinátái jelennek meg. Ha az irány gomb megnyomásával változik a robot pozíciója, a koordináta is változik. |
5 | Direction | A robotot a + vagy - irányba mozgatja a kiválasztott tengelyen. |
6 | Manual Mode Speed | A robot mozgási sebességét konfigurálja kézi üzemmódban. A sebesség a csúszkamutató húzásával módosítható. Ha a csúszkamutató 100%-nál van, a hozzá tartozó csuklósebesség a Léptetés fülön 30 fok/s, és a feladat maximális sebessége 250 mm/s. Ez a sebesség határozza meg a léptetés és mozgás gombok által szabályozott sebességet. |
7 | Real Mode | Konfigurálja, hogy a robot valós üzemmódban működjön-e, miközben léptetés üzemmódban van.
|
8 | Simulator Alignment | Kiválasztja a robotnak a szimulátorban megjelenő igazítási irányát. Az egyes irány gombok megnyomása a megfelelő irányba igazítja a robotot. |
9 | Robot Workspace | Megjeleníti a robotnak a léptetés szimulátorban a Workcell Manager képernyőn regisztrált munkatér információit. Nyomja meg a legördülő menüt a megjelenítendő munkatér kiválasztására. |


Megjegyzés
- TCP sebesség határérték: A léptetés és mozgás gomb működtetése során a legnagyobb működési sebesség 250 mm/s-ra van korlátozva a biztonsági előírások szerint.
- Ha a robot a léptetés üzemmódban történő mozgatás közben leáll, mert eléri a csukló határértéket vagy ütközést detektál, akkor állítsa be a biztonság helyreállítása üzemmódot és mozgassa a robotot a csuklószög határértékén belülre. További információkért a Biztonság helyreállítása üzemmódról lásd „(2.12-hu_HU) Biztonság helyreállítása üzemmód”