
Kézi működtetés - a jog használatának megismerése
KÖTELEZŐ NORMÁL 15 PERC
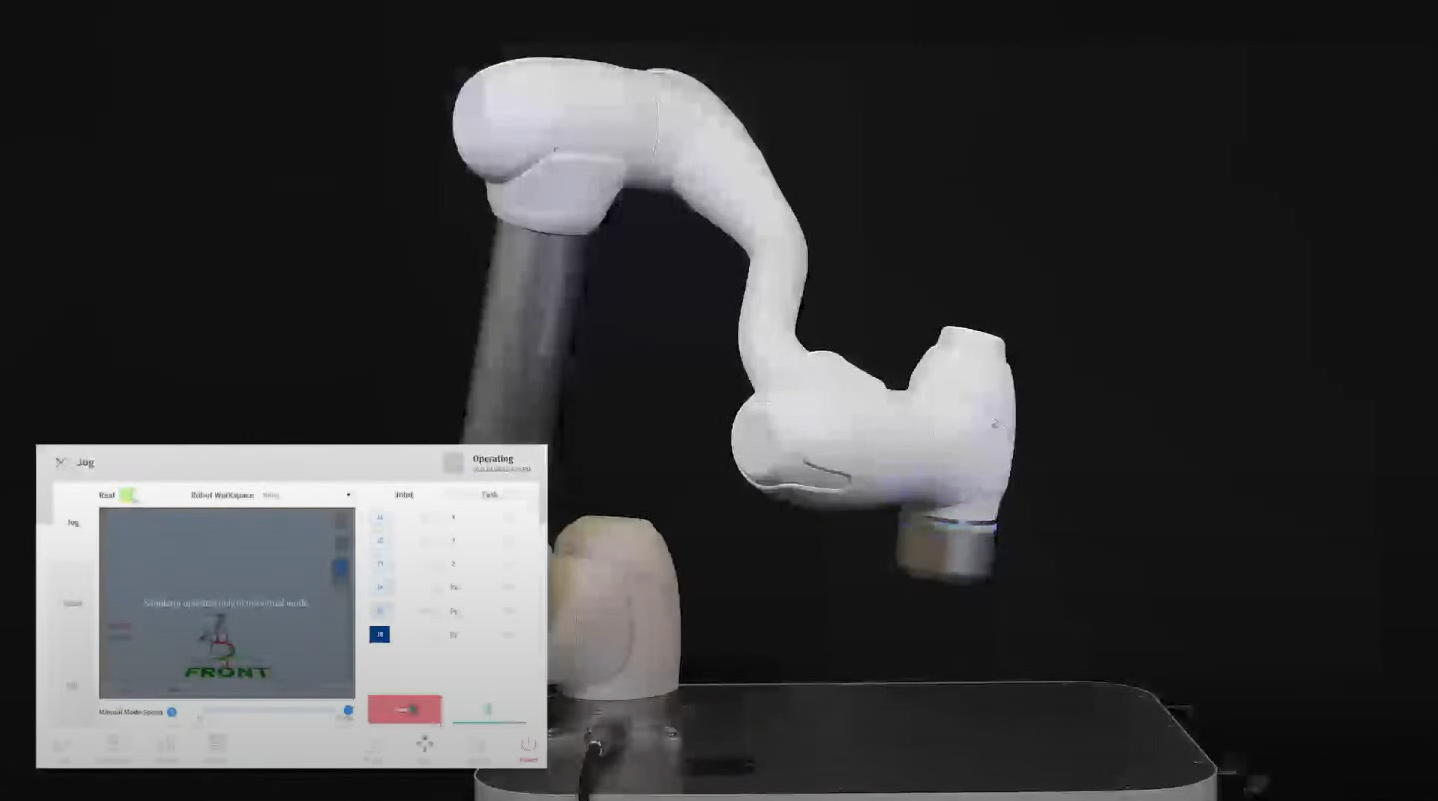
A felhasználó kiválaszthatja a manuális mozgatási módot a jog lapon. A léptetővel/mozgásra/igazítási lépéssel kapcsolatos további információkért lásd (2.11.0.1_temp-hu_HU) Léptetés funkció: .
- Léptetés: A robot illesztését vagy TCP-t a kiválasztott felhasználó által kiválasztott közös tengelyre vagy koordináta-tengelyre mozgatja
- Áthelyezés: A robot illesztését vagy TCP-t a felhasználó által megadott célpontra viszi
- Igazítás: A robot végét a felhasználó által kiválasztott síkra merőleges síkra viszi, és a robot végével párhuzamos koordináta-tengelyt
A robotmozgás két típusból áll.
- Közös mozgás: Minden ízületet lineárisan, forgó mozgással mozog
- Feladat mozgás: A végpontot lineárisan a célponthoz viszi
A következő módszer a robot mozgatására a léptetőképernyőről történő közös mozgás segítségével:
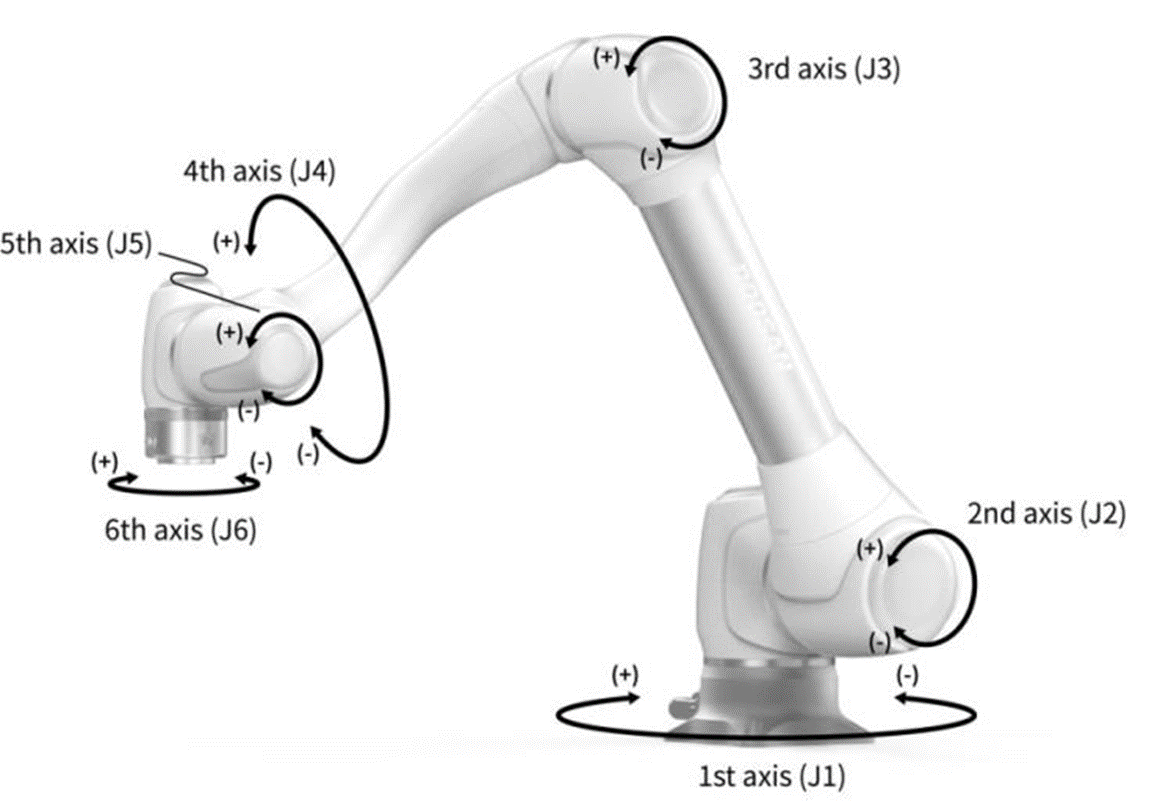
- Válassza ki a Joint (közös) fület.
- Válassza ki az elmozdulni kívánt tengelyt. Például kiválaszthatja a J1-et.
- A robot mozgatásához nyomja meg a +/- gombot. A robot a +/- gomb megnyomása közben mozog, és az aktuális hely valós időben jelenik meg a képernyőn.
A következő módszer a robot mozgatásának módja a feladatmozgás segítségével a léptetőképernyőn:
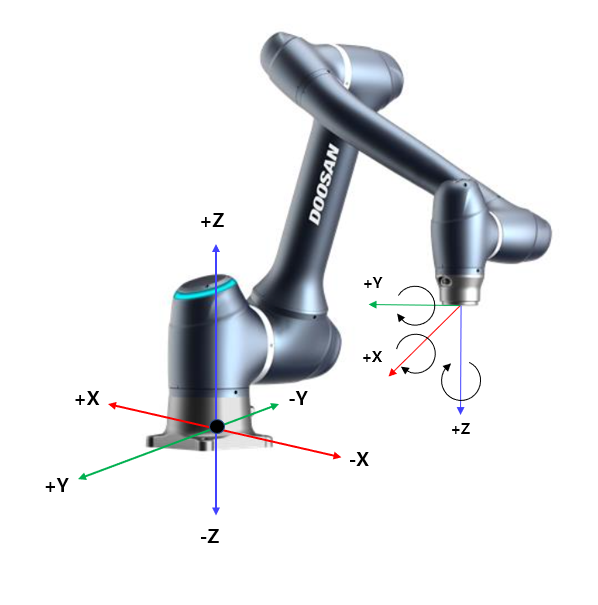
- Válassza ki az alapkoordinátákat. A robot az ALAPKOORDINÁTÁK vagy A SZERSZÁM koordinátái szerint mozgatható.
- Válassza ki a mozgás irányát. Például az X-tengely választható ki.
- A robot mozgatásához nyomja meg a +/- gombot. A robot a +/- gomb megnyomása közben mozog, és az aktuális hely valós időben jelenik meg a képernyőn.
A léptetőmozgással, mozgással és igazítási műveletekkel kapcsolatos további információkért lásd (2.11.0.1_temp-hu_HU) Léptetés képernyő: , (2.11.0.1_temp-hu_HU) Mozgás képernyő (2.11.0.1_temp-hu_HU) Igazítása Képernyő illetve.
Megjegyzés
- Ha az aktuális mód billenőkapcsolója a léptető képernyő bal felső részén ki van kapcsolva, a robot csak a léptető képernyő bal oldalán lévő virtuális képernyőn mozog. Az aktuális robot akkor mozog, ha az aktuális üzemmód billenőkapcsolója be van kapcsolva.