
A kezelői beavatkozás funkciója
Ha probléma lép fel a robot működése közben, vagy a felhasználó parancsot ad ki, a robot leáll, és egy felugró üzenetet jelenít meg, amely lehetővé teszi a kezelőnek, hogy beavatkozzon és megoldja a helyzetet. Miután a felhasználó megoldotta a problémát, a feladat azon a programsorban folytatódik, ahol a probléma előfordult.
Jegyzet
A dolgozói beavatkozás funkció használatához el kell végeznie az alábbi beállítások egyikét.
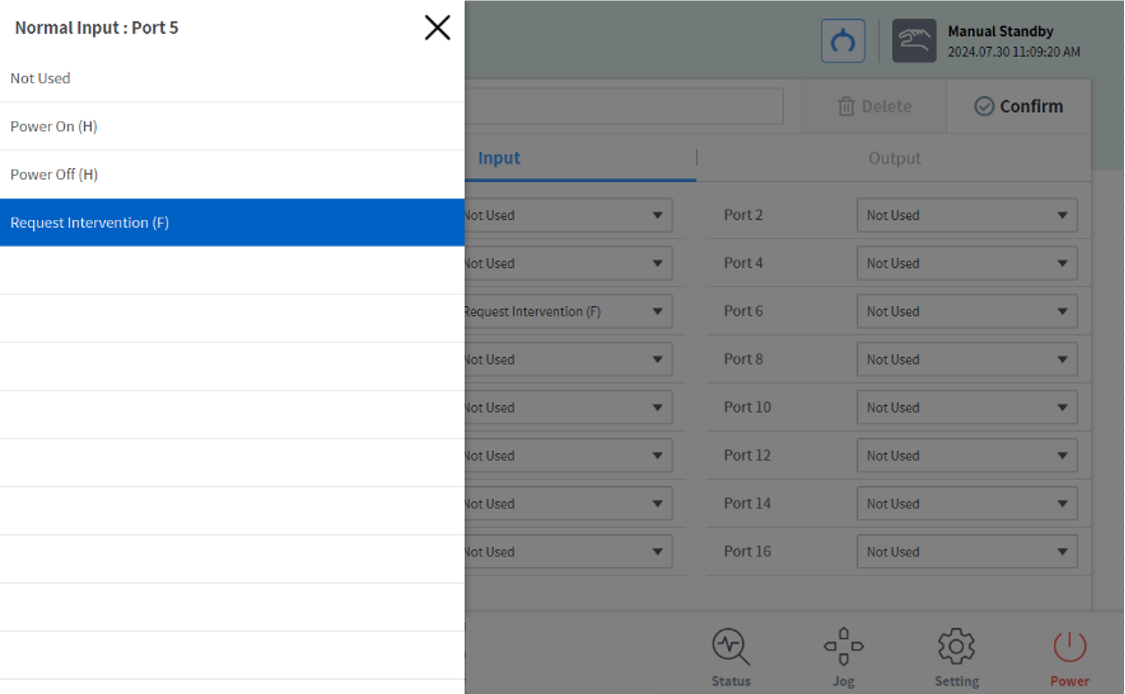
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(A részletes beállításokat lásd a Welding Techinical Note.)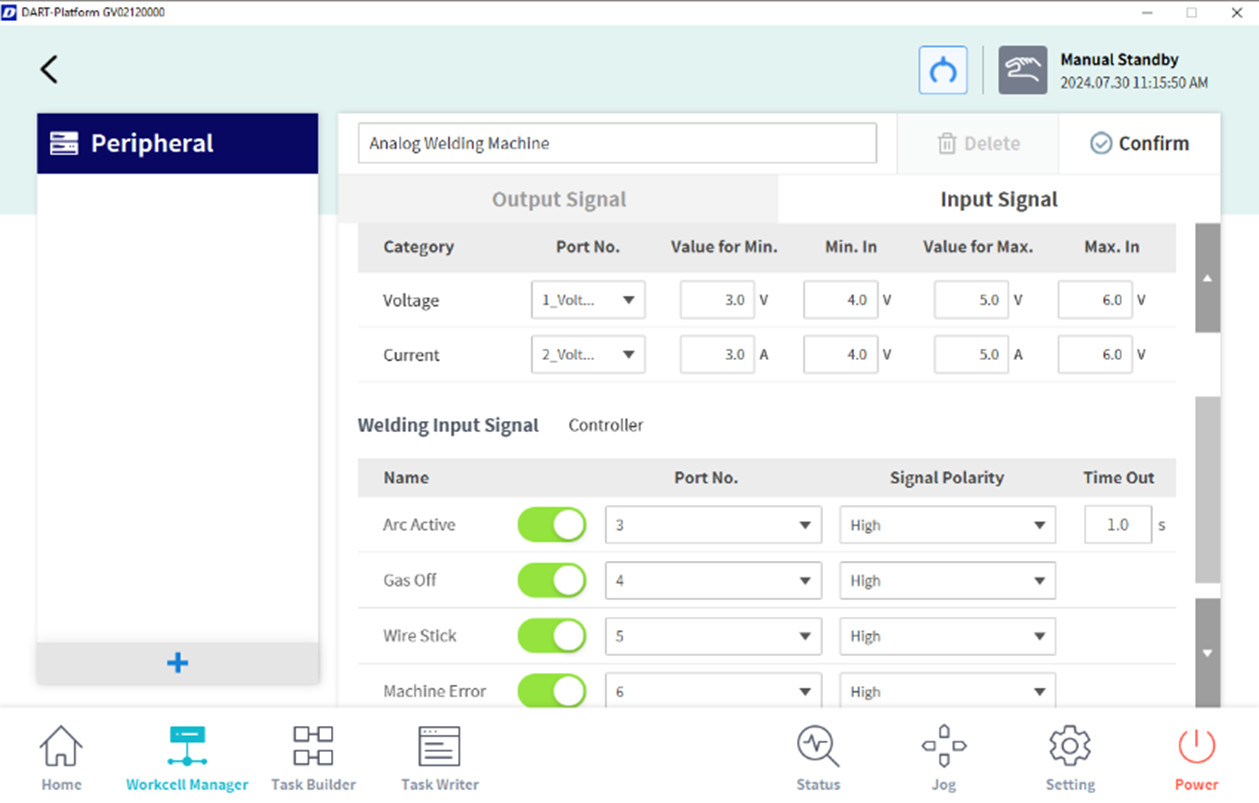
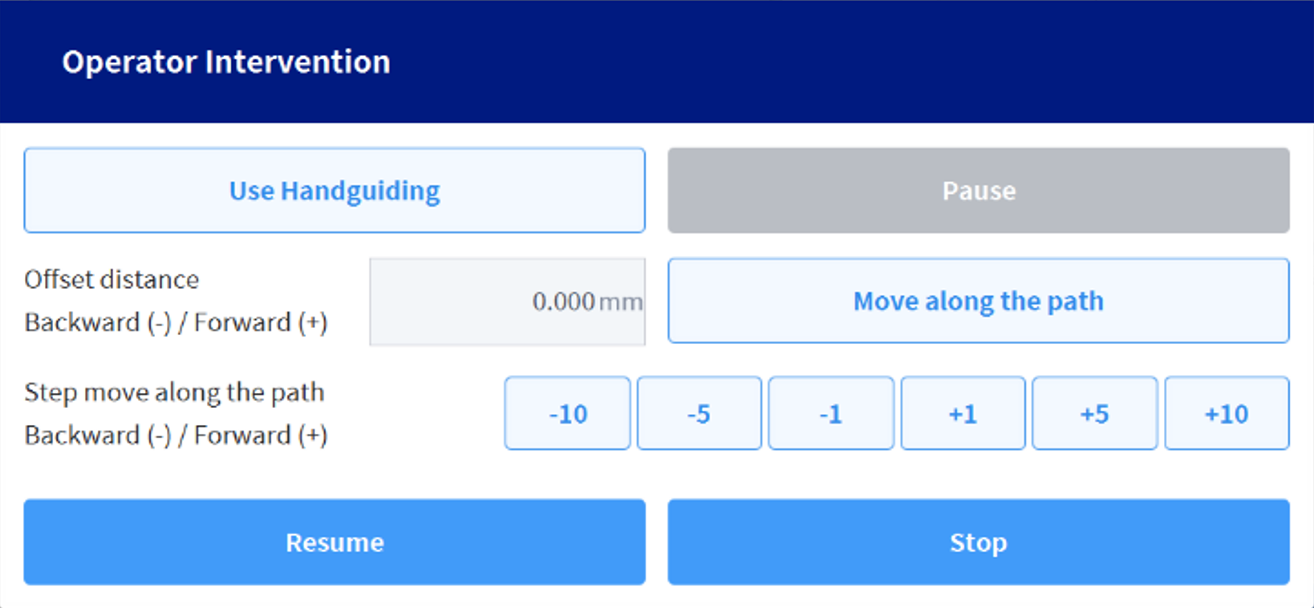
A „Mozgás az útvonalon gomb” és a „Lépésmozgatás gomb (-10,-5,-1,+1,+5,+10)” ugyanazt a műveletet hajtja végre. Azonban az előbbi a referenciapozíciótól előre vagy hátra mozog egy kézzel bevitt eltolás segítségével, míg az utóbbi előre vagy hátra egy pontot céloz meg egy előre beállított Lépéseltolás segítségével. Miután végrehajtott egy műveletet a fenti gombokkal, egy további gomb megnyomása az aktuális pozíciót az Eltolás értékével elmozdítja.
A „Kézvezetés gomb használata” csak akkor aktiválódik, ha be van állítva egy együttműködési zóna, és a robot állapota Kézvezetés állapotra vált, amely lehetővé teszi a közvetlen tanítást a zónán belül. Ezt követően a pilótafülke hátulján található gomb vagy a Teaching medál megnyomásával aktiválhatja a közvetlen tanítást.
Kézvezetés módban a „Kézvezetés gomb használata” a „Kézvezetés befejezése gomb”-ra változik.
Ha megnyomja az „End Handguiding” gombot, a kézvezetési állapot véget ér. Ekkor biztonsági okokból a robot aktuális pozíciója, szöge és a megállási pont értékei (az első felbukkanás időpontja) összehasonlításra kerülnek, így előugró ablak jön létre. Ha a következő tartalmú felugró ablak jelenik meg, ismét közvetlenül meg kell tanítania a robot helyzetének és testtartásának korrigálását, és újra kell próbálkoznia.
Ha az aktuális TCP-pozíció és a TCP-pont közötti egyenes távolság több mint 20 cm-rel eltér
Ha az aktuális illesztési szög és a csatlakozási szög közötti különbség több mint 1-3 tengely (10 fok) / 4-5 tengely (30 fok) / 6 tengely (60 fok) különbséggel tér el
Ez a funkció csak a MoveL / MoveC / MoveB műveletek során támogatott.
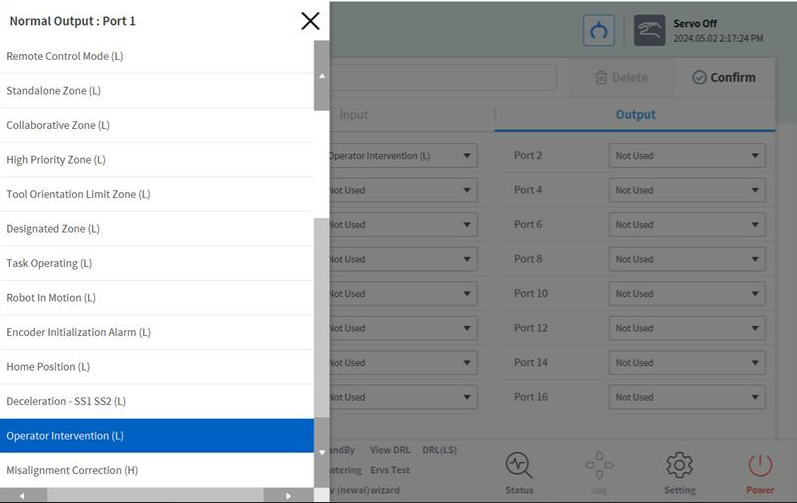
A Normál kimenet funkcióval jelezheti, hogy felugró ablak történt. A jel aktív marad, amíg a felugró ablak megjelenik, és deaktiválódik, amikor a felugró ablak véget ér.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Íme a használati forgatókönyv:
Digitális bemeneti jel fogadása a felhasználótól vagy a csatlakoztatott eszköztől a program futása közben.
A robot megáll, és megjelenik a kezelői beavatkozás előugró ablaka.
(Közvetlen tanítás esetén) Nyomja meg a Handguiding használata gombot, majd nyomja meg a pilótafülke vagy a tanítási függő hátoldalán található gombot a közvetlen tanítás aktiválásához. A közvetlen tanítási művelet befejezése után nyomja meg a Kézvezetés befejezése gombot.
Nyomja meg a Mozgás az útvonal mentén gombot a robot mozgatásához az ösvényen.
A robot tetszőleges mozgatása után nyomja meg a Folytatás gombot a robot feladatának folytatásához, és zárja be az előugró ablakot.