Próbálja ki a Force Command mintákat
OPCIONÁLIS NORMÁL 20 PERC

Ezt a mintát a Feladatíróba hozza létre. Ez a minta szinte ugyanúgy kipróbálható a Feladatszerkesztőn.
Vigyázat
- Mielőtt megpróbálná a mintát, mindenképpen olvassa el és kövesse a következőt Használatra vonatkozó óvintézkedések: . További információkért lásd 1. RÉSZ. Biztonsági kézikönyv: .
- Ehhez a mintához a alkalmazásban létrehozott Feladatíró fájlra van szükség Próbálja ki a compliance parancsmintákat.
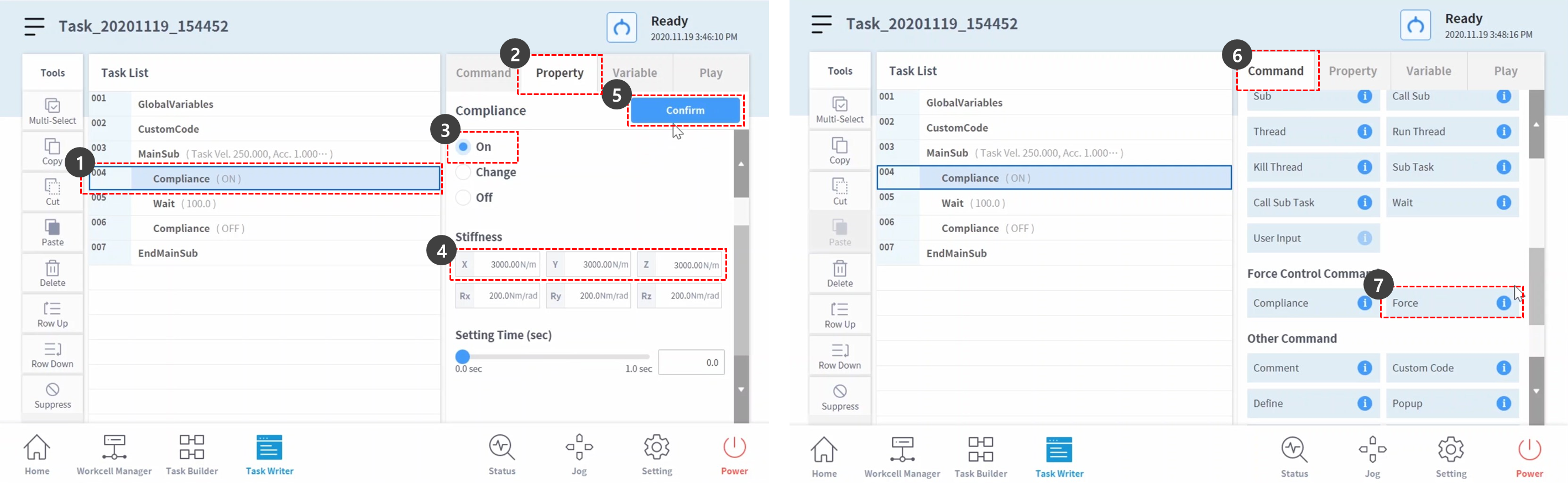
- Próbálja ki a compliance parancsmintákat Nyissa meg a létrehozott Feladatíró fájlt, és válassza ki a compliance parancsot a feladatlista negyedik sorában.
- Válassza ki a tulajdonság lapot.
- Állítsa be az üzemmódot a következők szerint: A bekapcsolt üzemmód lehetővé teszi a megfelelőség ellenőrzését. A Force parancs csak akkor érhető el, ha a compliance vezérlés engedélyezve van.
- Üzemmód: Be
- Állítsa be az alapértelmezett merevségi értéket a következők szerint:
- X, Y, Z: 3000 N/m (alapértelmezett)
- RX, Ry, RZ: 200 Nm/rad (alapértelmezett)
- Nyomja meg a jóváhagyás gombot.
- Válassza ki a Command (parancs) fület.
- Adjon hozzá egy Force parancsot. Ez a parancs a tervek szerint az erőszabályozás engedélyezéséhez használható.
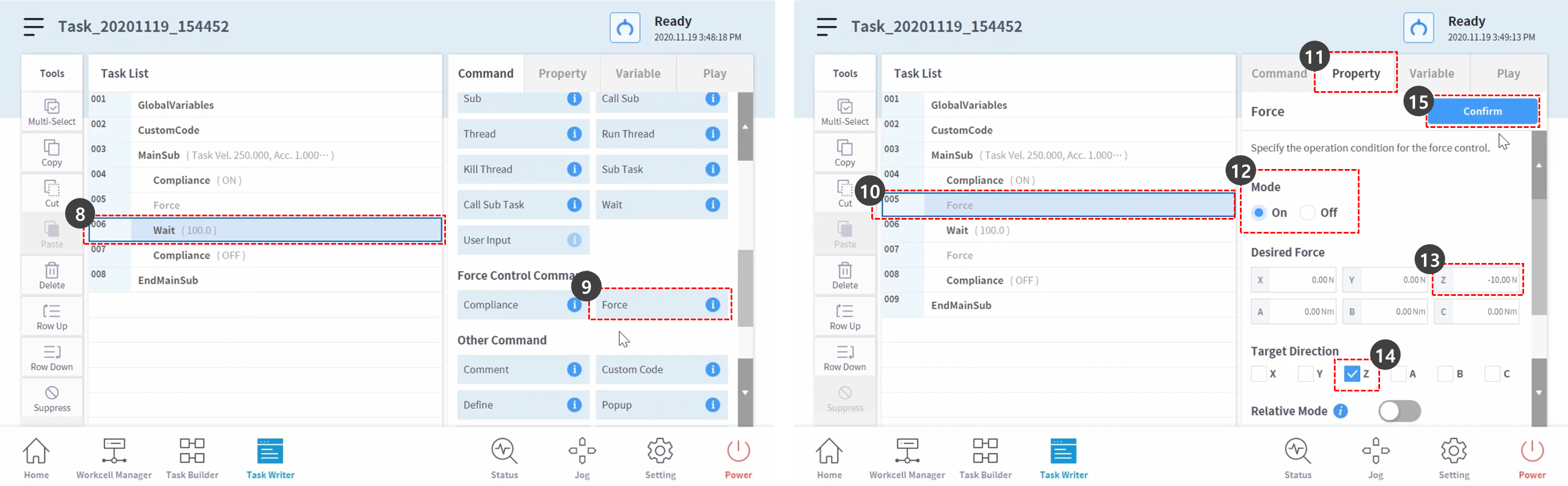
- Válassza ki a feladatlista hatodik sorát.
- Adjon hozzá egy Force parancsot. Ez a parancs az erőszabályozás letiltására szolgál.
- Válassza ki a Force parancsot a feladatlista ötödik sorában.
- Válassza ki a tulajdonság lapot.
- Állítsa be az üzemmódot a következők szerint: A bekapcsolt üzemmód engedélyezi az erőszabályozást.
- Üzemmód: Be
- Állítsa be a kívánt erőt a következők szerint:
- X: 0 N (alapértelmezett)
- Y: 0 N (alapértelmezett)
- Z: -10 N
- RX, Ry, RZ: 200 Nm/rad (alapértelmezett)
- Csak a Z-tengelyt ellenőrizze a célirányban.
- Nyomja meg a jóváhagyás gombot.
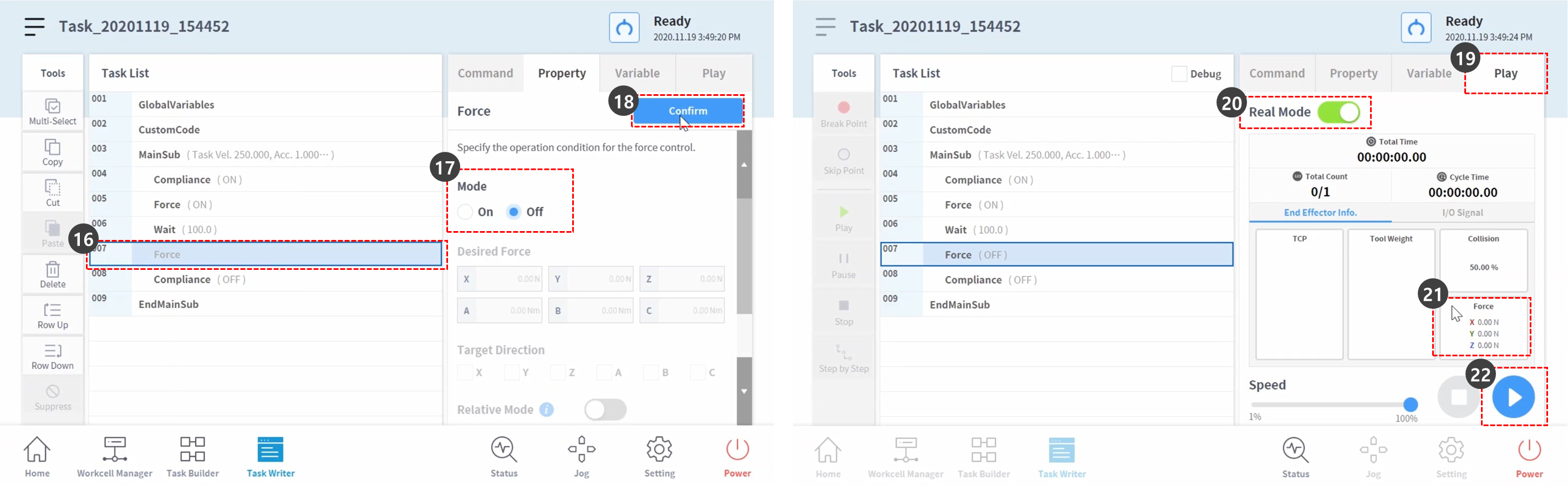
- Válassza ki a Force parancsot a feladatlista hetedik sorában.
- Állítsa be az üzemmódot a következők szerint: A kikapcsolt üzemmód letiltja az erőszabályozást.
- Üzemmód: Ki
- Nyomja meg a jóváhagyás gombot.
- Válassza a Lejátszás fület.
- Engedélyezze a Real Mode (valós mód) váltógombot.
- A váltógomb bekapcsolása után a gomb zölden világít.
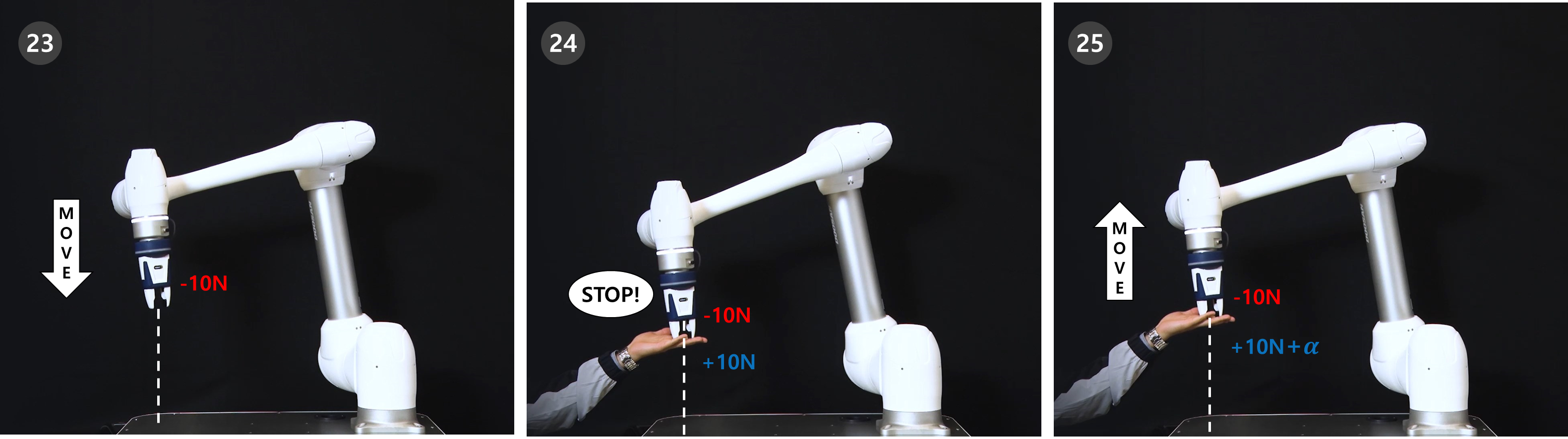
- Ellenőrizze, hogy az egyes tengelyek TCP ereje 0-e. Ez az erőérték a robot végi TCP-n jelenleg alkalmazott külső erő mérete.
- Nyomja meg a lejátszás gombot.
- -10N erő kerül alkalmazásra a robot végén TCP okozza a robot lassan mozog a Z-tengely irányába.
- A robot vége taszítja a robot mozgását +Z-tengely irányban, a robot mozgási irányával ellentétes irányban. Amikor a robotot mozgató erő és a robotmozgást taszító erő eléri az egyensúlyt, a robot úgy tartja a helyzetét, mintha megállt volna.
- Ha a robotra +10N-nél nagyobb erőt alkalmaznak, a robot megfelel a robotra kifejtett erőnek, és az erő irányába mozdul el.