
Igazítás cél alapján
Hasznos funkció munkadarab betanításhoz, ha a munkadarab a TCP-hez igazodik tengelyirányban. A tanításnak a póz rögzítése utáni elvégzéséhez használja a sík vagy vonal zárolt közvetlen tanítási funkciót a vezérlőpult gombokkal.
A robot TCP-nek a cél alapján történő igazításához kövesse az alábbi lépéseket:
- Válassza ki a Igazítsa fület és az Párhuzamos a célra fület.
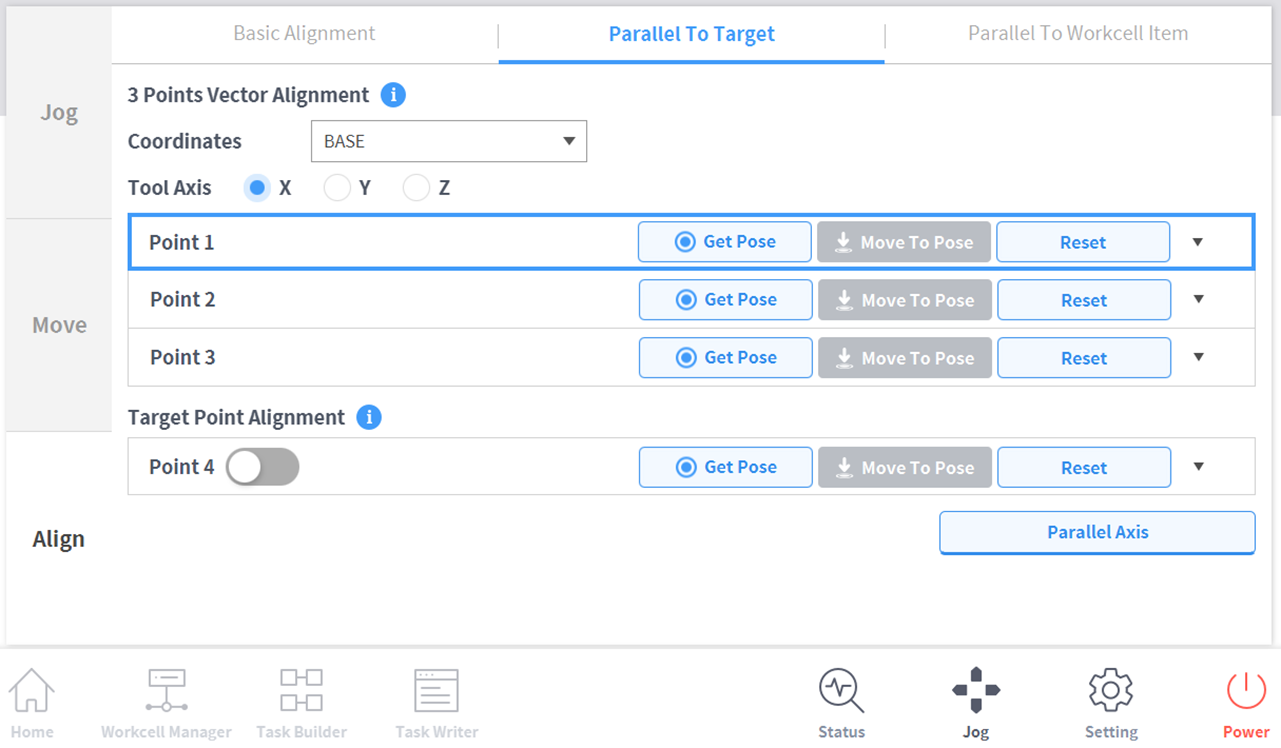
- Válassza ki a referencia koordinátákat az igazításhoz.

- Válassza ki a szerszám tengelyt az igazításhoz.

- Mozgassa a robotot a kívánt pozícióba, és érintse meg az 1 pont gombot.
- Érintse meg a Póz mentése gombot az 1 pont menüben.
- A 2 pont és 3. pont beállítása ugyanígy történik. A beállítások befejezésekor a három pont alapján beállítja a virtuális vektorteret.

- A 2 pont és 3. pont beállítása ugyanígy történik. A beállítások befejezésekor a három pont alapján beállítja a virtuális vektorteret.
- (Opcionális) A TCP irány és pozíció együttes beállításához nyomja meg a 4 pont „váltó” gombját, mozgassa a robotot a kívánt pozícióba, és érintse meg a „Póz mentése” gombot.
- Érintse meg és tartsa lenyomva a Tengely igazítása gombot a tengely igazításához.
- Helyezze a 6 tengelyes fejet 150 mm-rel a cél fölé a Z-tengely irányában.