
Próbálja ki a minta MoveJ/MoveL parancsokat
KÖTELEZŐ NORMÁL 20 PERC
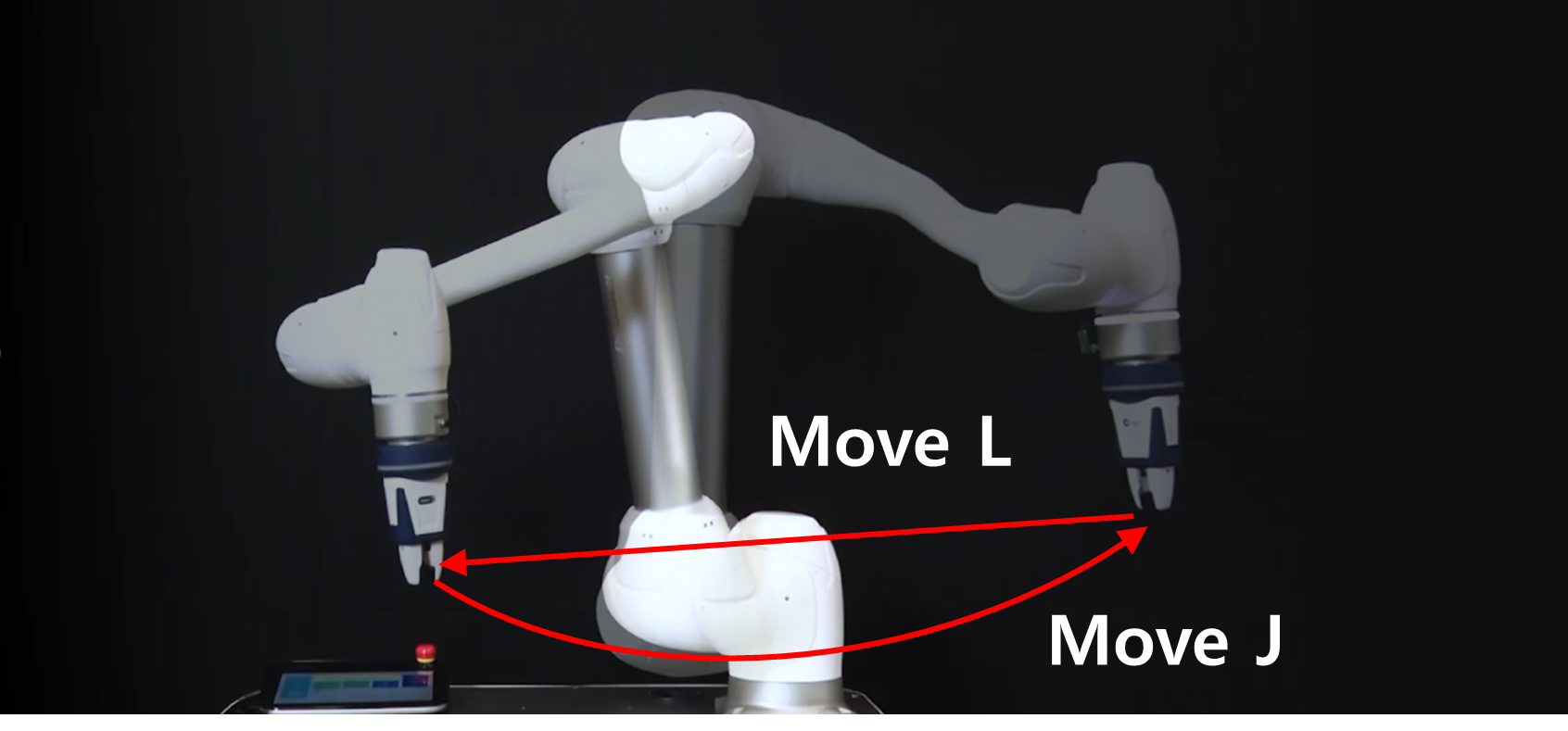
Ebben a mintában add MoveJ és MoveL parancsokat a Feladatszerkesztőben, hajtd végre őket, és hasonlítsd össze a két mozgás közötti különbséget.
Vigyázat
- Mielőtt megpróbálná a mintát, mindenképpen olvassa el és kövesse a következőt Használatra vonatkozó óvintézkedések: . További információkért lásd 1. RÉSZ. Biztonsági kézikönyv: .
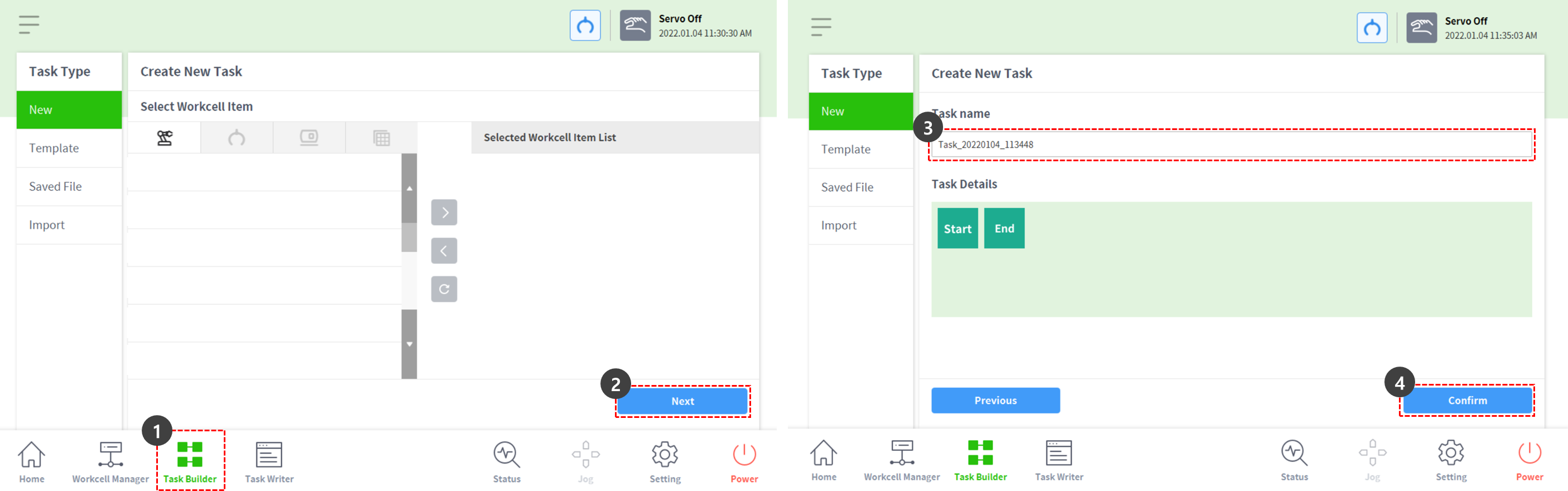
- Válassza ki a Feladatszerkesztőt a képernyő alján található sávból.
- A Feladatírói programozási módszer majdnem megegyezik a Feladatszerkesztővel.
- Nyomja meg a tovább gombot.
- Regisztrált munkacella-elemeket tartalmazó program, például befogók létrehozásához hozzá kell adni egy munkacella-elemet.
- Ebben a mintában nyomja meg a Next (következő) gombot anélkül, hogy kiválasztaná a Workcell (Munkasejt) elemeket és készségeket.
- Adjon meg egy feladatnevet.
- Nyomja meg a jóváhagyás gombot.
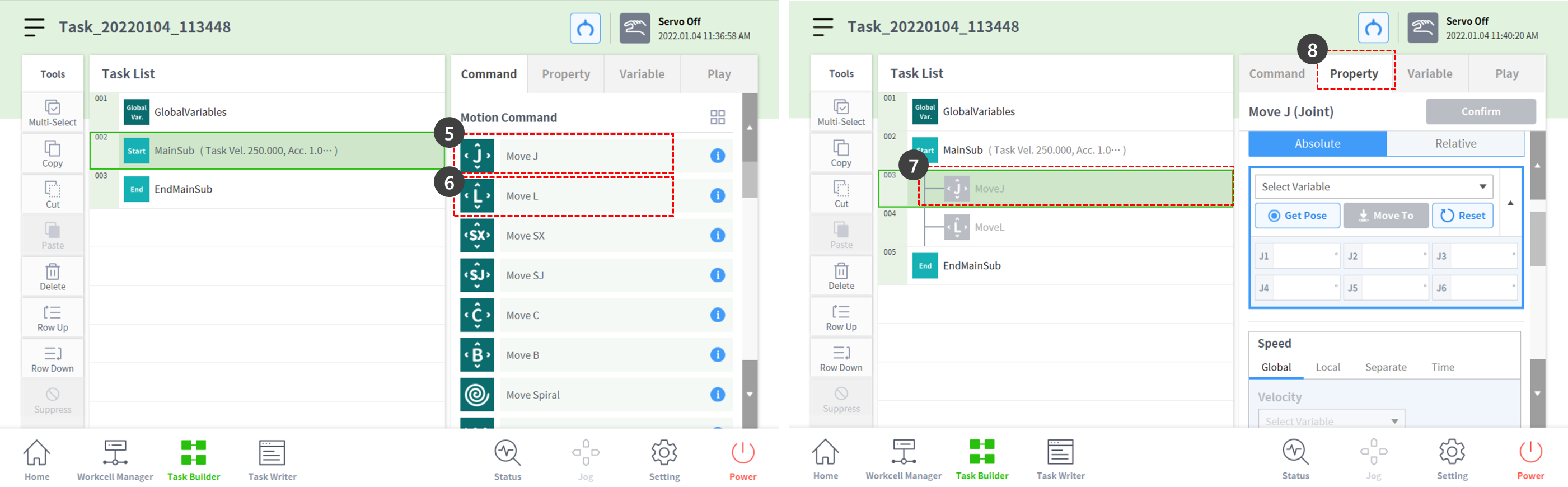
- Ha a MainSub (MainSub) lehetőséget választotta a második sorban, nyomja meg a MoveJ gombot a ModeJ parancs feladatlistához történő hozzáadásához.
- A parancs a kiválasztott sor következő sorához kerül.
- Nyomja meg a MoveL gombot az MoveL parancs feladatlistához történő hozzáadásához.
- A feladatlista harmadik sorában válassza a MoveJ lehetőséget.
- Válassza ki a tulajdonság fület a jobb felső sarokban. A parancs tulajdonságértékei a tulajdonság lapon állíthatóak be.
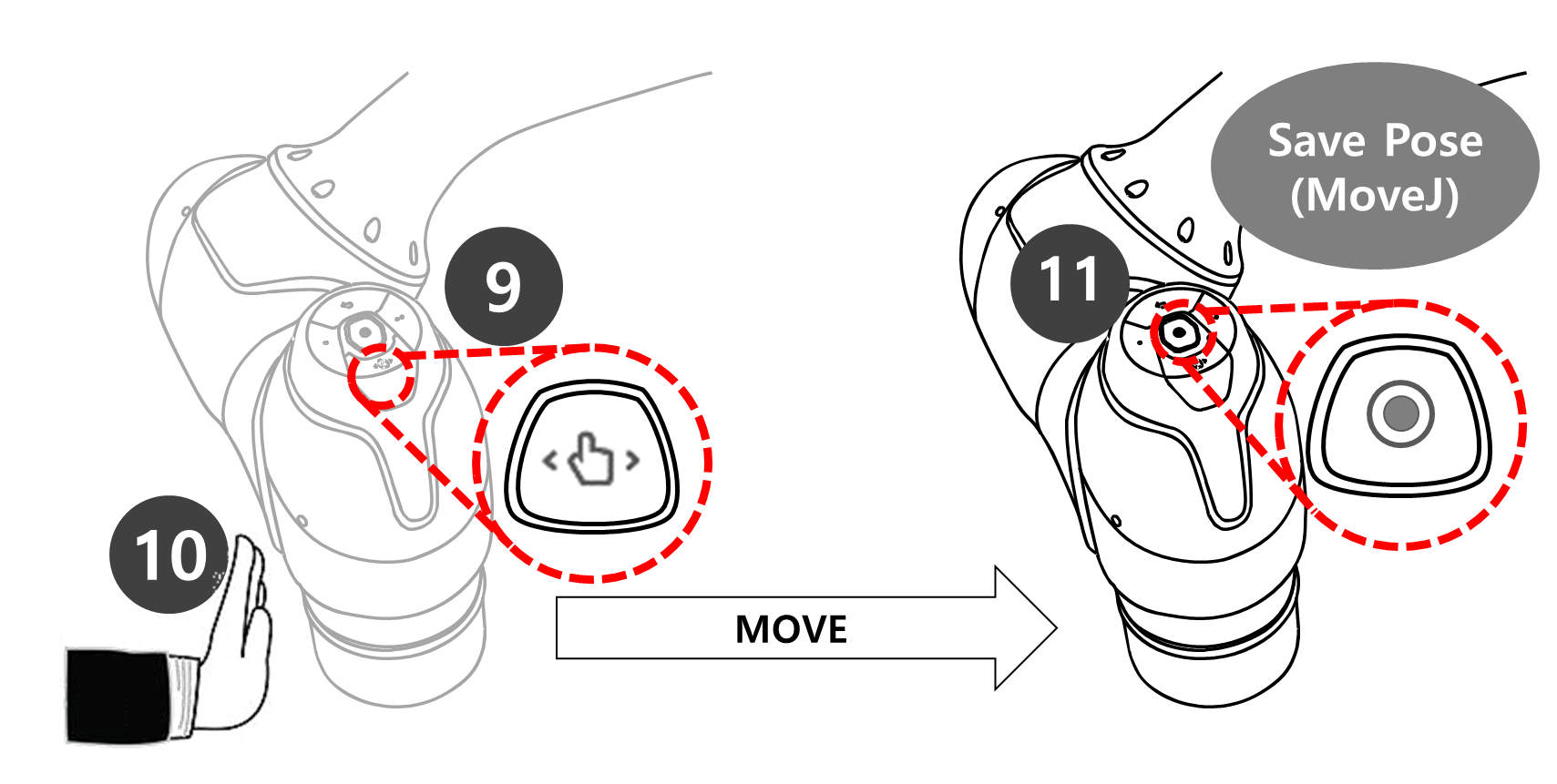
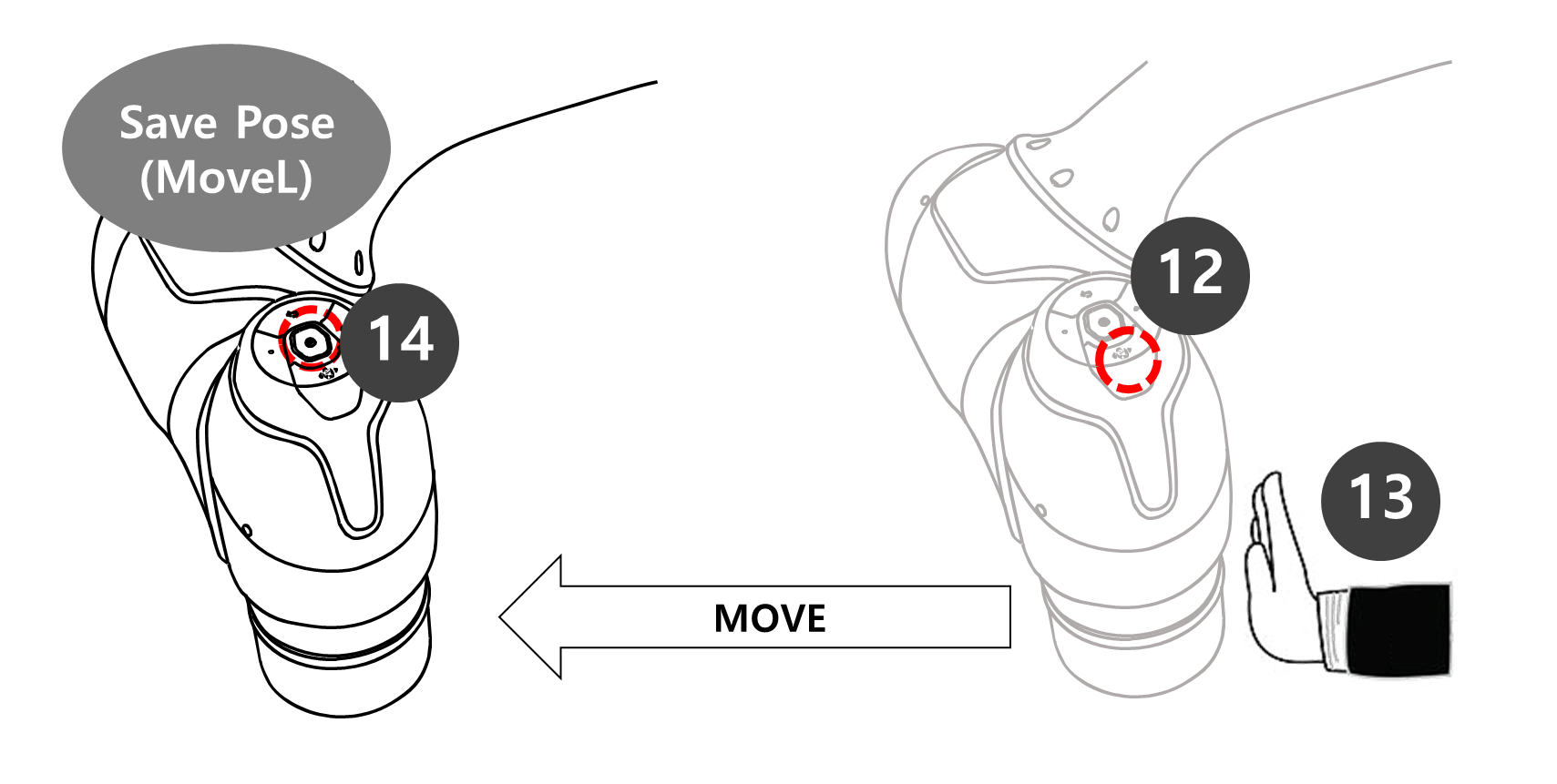
- Az egyik kezével nyomja meg és tartsa lenyomva a robotvég tetején lévő pilótafülkében található kézi vezetésű gombot A 11-9. Lépés menti a ModeJ pózát.
- A pilótafülkében nem használható robotok esetében ellenőrizze az alábbi „megjegyzést”.
- A másik kezével tolja a robotot biztonságos helyre.
- Engedje fel a kezet vezérlő gombot, és nyomja meg a Pose mentése gombot.
- Az egyik kezével nyomja meg és tartsa lenyomva a robotvég tetején lévő pilótafülkében található kézi vezetésű gombot A 14-12. Lépés menti a MoveL pózát.
- A feladatlista MoveL elemét nem kell kiválasztani. Ha megnyomja a Pose mentése gombot, a feladatlista automatikusan a feladatsorra kerül.
- A másik kezével tolja a robotot biztonságos helyre.
- Engedje fel a kezet vezérlő gombot, és nyomja meg a Pose mentése gombot.
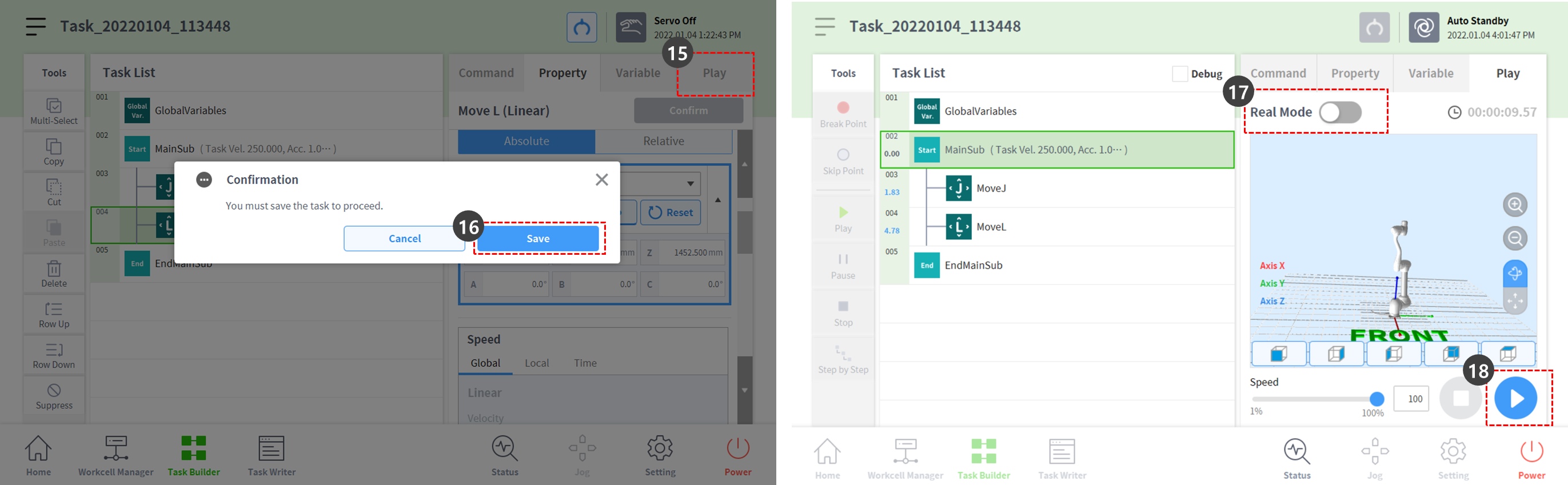
- A feladat végrehajtásához nyomja meg a Lejátszás fület.
- Mivel a feladat nincs elmentve, egy felugró ablak jelenik meg, amely a feladat mentését kéri. Nyomja meg a Mentés gombot.
- Állítsa a Real mode (valós mód) váltógombot Disabled (Letiltva) állapotba (szürke).
- Ha a valós mód le van tiltva, a robot nem mozog, és csak a virtuális robot mozog a képernyő-szimulátorban.
- A feladat végrehajtása előtt ajánlott a feladatot ebben a szimulációs módban tesztelni.
- Nyomja meg a lejátszás gombot a jobb alsó sarokban.
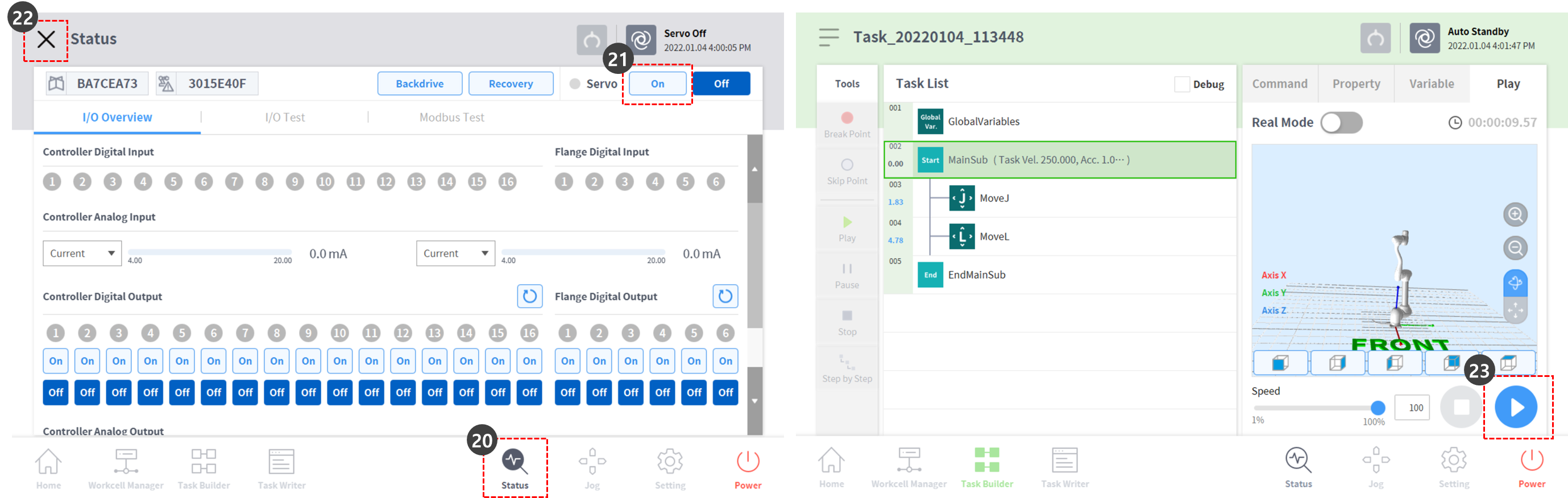
- Megjelenik egy hibaüzenet, amely azt jelzi, hogy a robot nem áll készen. A felugró ablak bezárásához nyomja meg az X gombot.

- A robot csak Servo ON (szervo be) állapotban tud mozogni.
- A robot szervo be- és kikapcsolása a Status > Servo menün keresztül kapcsolható be és ki .
- A robot üzemkész állapotba való beállításához a robotot Servo ON (szervo be) állapotba kell állítani. Válassza ki a Status (állapot) elemet az alsó sávon.
- Nyomja meg a szervo be gombot.
- Az állapot ablak bezárásához érintse meg a bal felső sarokban található X gombot.
- Nyomja meg ismét a lejátszás gombot a jobb alsó sarokban. A robot sikeresen mozog a szimulátorban.
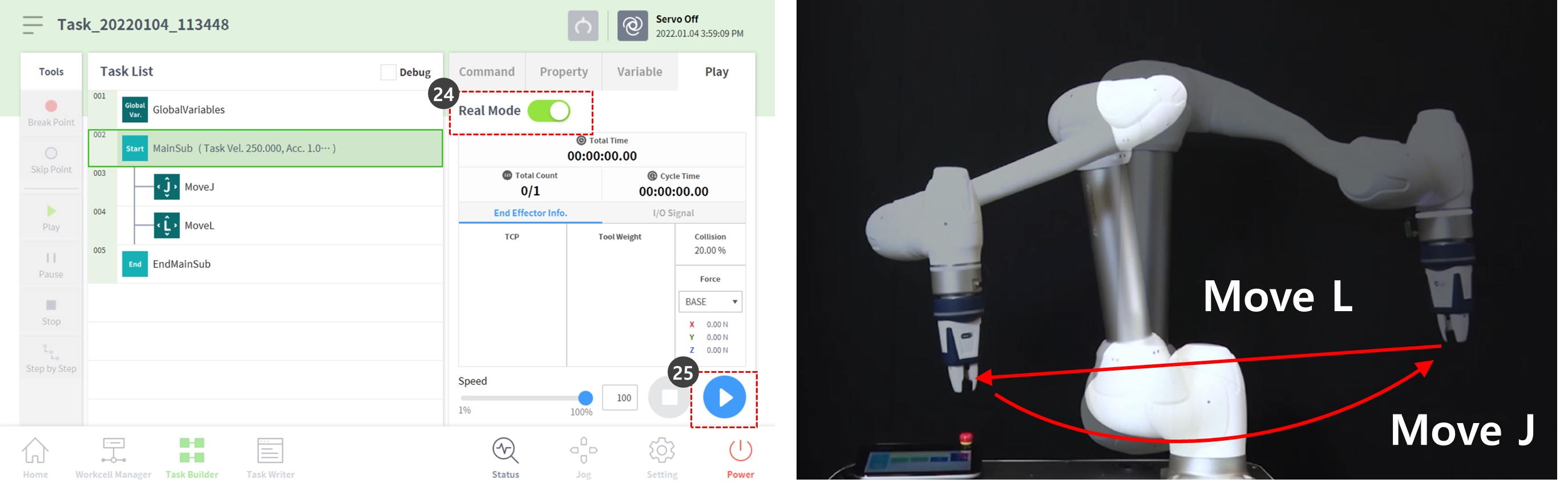
- Állítsa a valós mód váltógombját az állapot (zöld) engedélyezéséhez az aktuális robot működtetéséhez.
- Nyomja meg a lejátszás gombot a jobb alsó sarokban. Az aktuális robot sikeresen mozog.
Megjegyzés
A pilótafülke Save Pose (Pose mentése) gombja a következő funkciót a Teach függőlámpa képernyőjén azonos sorrendben hajtja végre.
- Nyomja meg a Property > Get Pose (tulajdonság > Pose lekérése ) gombot az aktuális Pose (Pose) információ
- A parancstulajdonság módosításainak mentéséhez nyomja meg a Megerősítés gombot.
- Válassza ki a következő parancsot.
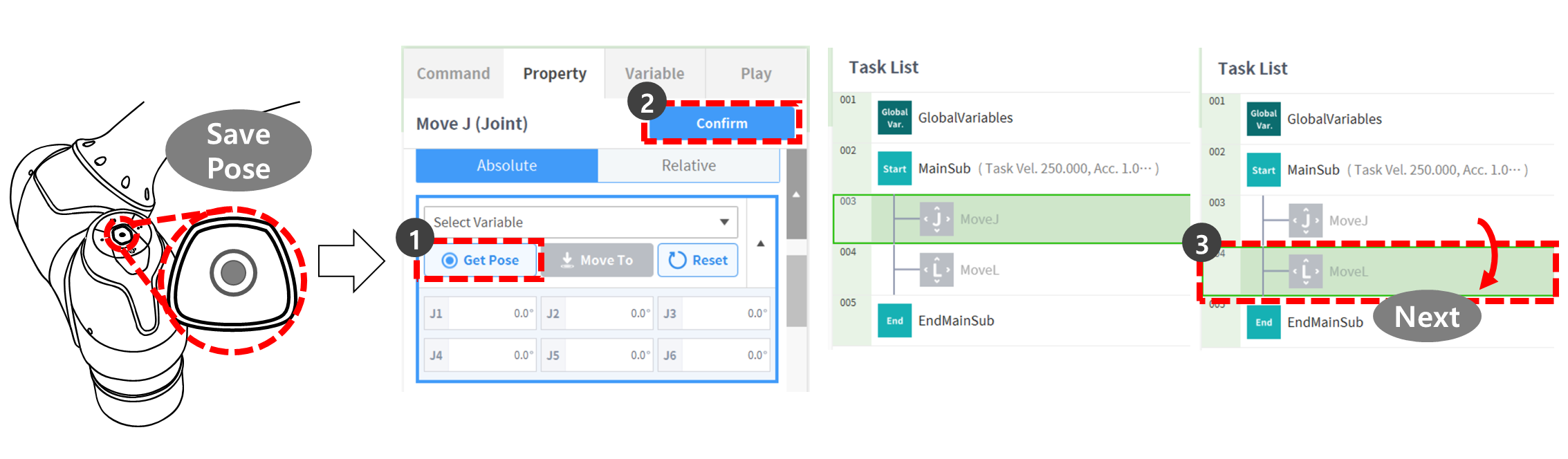
Ezzel lehetőség van a feladatok gyors programozására, ha egyszerre több mozgási parancsot ad a feladatlistához, a robotot mozgatva, miközben megnyomja a vezetőfülkében lévő kézi vezérlő gombot, és megnyomja a Pose gombot.