A Feladatszerkesztő Robot Motion tulajdonságainak áttekintése
Ez a standard mozgások, a MoveJ és a MoveL parancsok tulajdonságképernyője. Más mozgások is hasonló tulajdonságokkal rendelkeznek.
Ha a mozgás minimális beállításokkal jön létre, csak a pózolási információkat (az alábbi ábrán 5) kell megadni.
Név | Leírás | |
|---|---|---|
1 | Megjegyzés | A feladat ablakban található parancs leírása vagy megjegyzése |
2 | Koordináták |
|
3 | Válassza ki a mozgás típusát |
|
4 | Változók kiválasztása | A változóként regisztrált adatok elhelyezése választható |
5 | Pozícióadatok | A Pose (Pozíció) információ be van adva
|
6 | Sebességbeállítás |
|
7 | TCP sebesség befogása | A MainSub tulajdonában, Ha a TCP Speed Befogási funkció engedélyezve van, ha a feladat lineáris sebessége meghaladja a globális sebességhatárt a Move J és Move JX parancsokban, a globális TCP sebesség automatikusan alkalmazásra kerül. A biztonsági sebesség és a helyi sebességkorlátozások azonban mindig elsőbbséget élveznek a globális sebességkorlátozással szemben. |
8 | Működési mód |
|
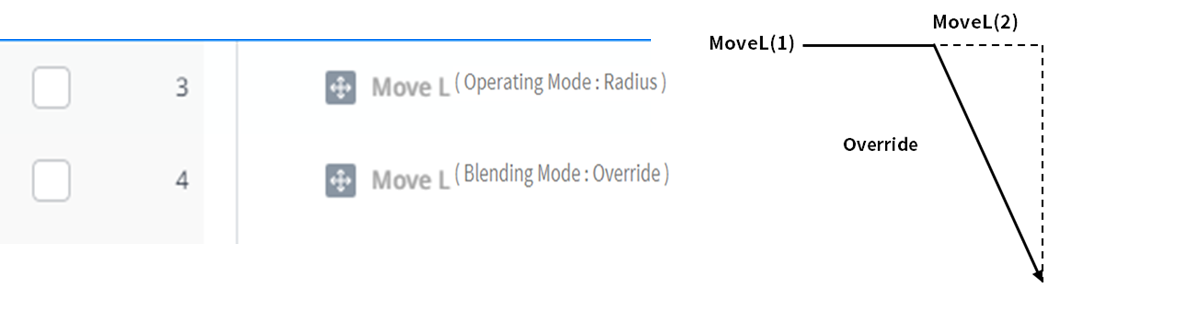
9 | Keverési mód | Az a lehetőség, amely meghatározza, hogy figyelmen kívül hagyja vagy felülírja-e az előző mozgást a következő mozgás keverési módjának megfelelően, ha a sugár az előző mozgás opciójaként van beállítva |
Üzemmód
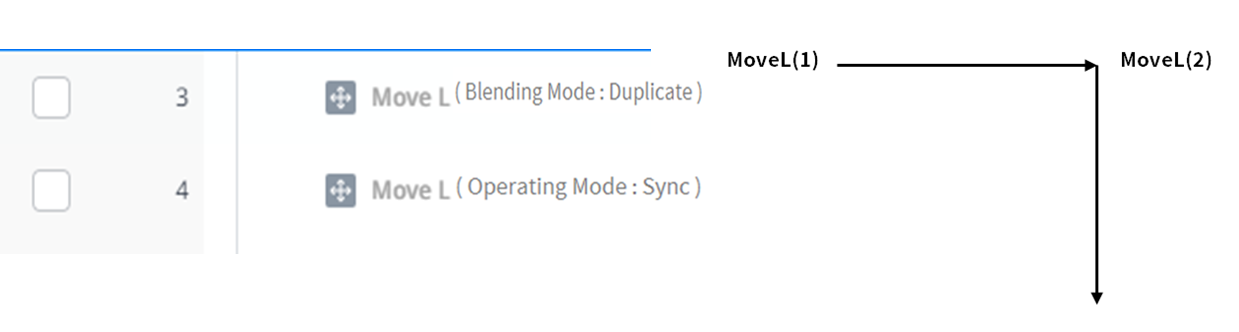
Szinkronizálás
A Sync paranccsal a következő parancsra léphet, amikor a folyamatban lévő parancs befejeződött. Alapértelmezettként van beállítva, és általános helyzetekben használják.
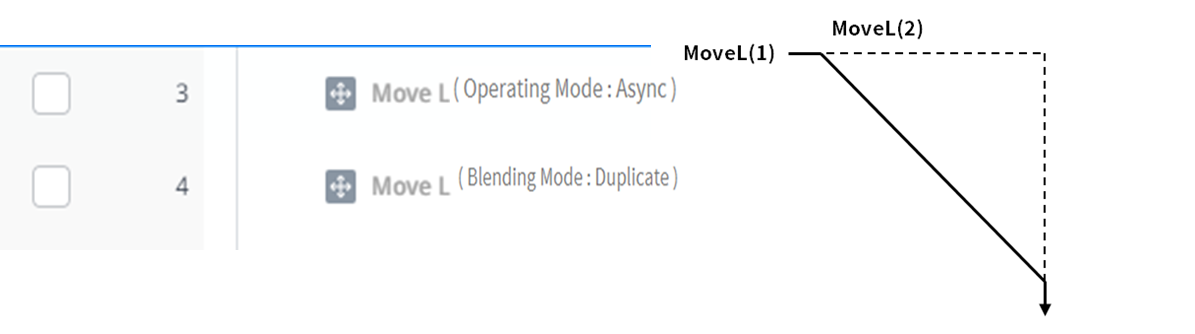
Aszinkron
Az async egyszerre indítja el a következő parancsot, amikor a mozgás parancs elkezdődik. A különböző mozgások zökkenőmentes összekapcsolására szolgál, és akkor is használható, ha a jelkimenet egyidejűleg be- és kikapcsol, amikor a mozgás elindul.
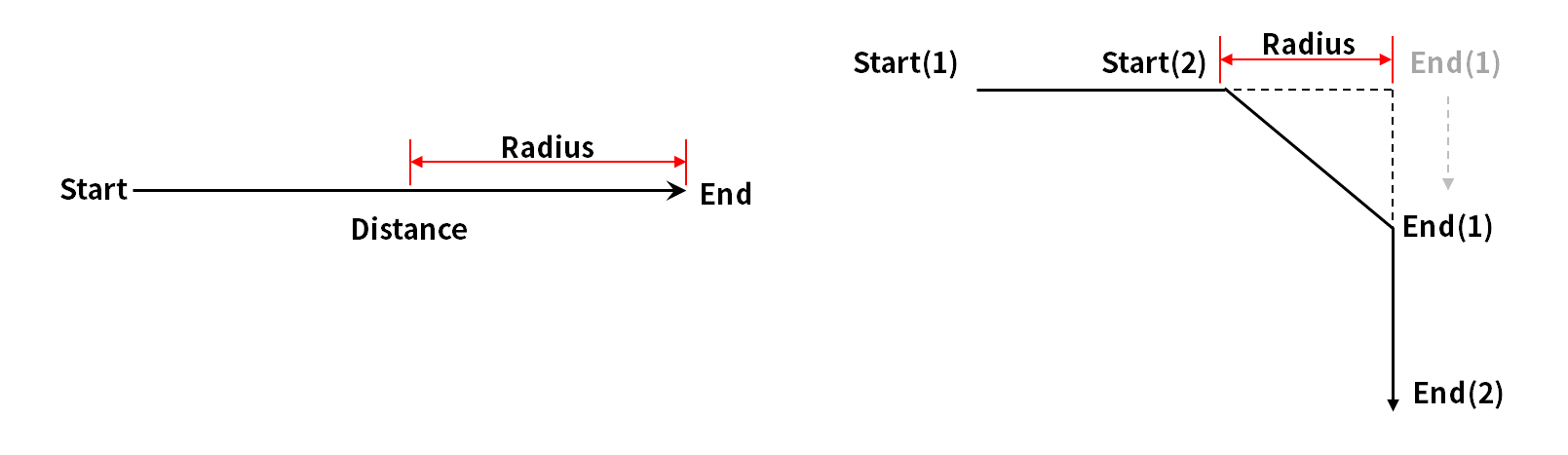
Radius
A Radius (Sugár) opció aktiválja az aszinkron funkciót a Radius (Sugár) szakaszban, mielőtt a mozgás parancs eléri a célpontját. Ezzel az opcióval zökkenőmentesen kapcsolódhat a következő mozgásparancshoz anélkül, hogy leállítaná az aktuális mozgásparancsot. A sugár alapbeállításként 0 mm-re van beállítva.
Vigyázat
A Radius opciónak a következő jellemzői és korlátai vannak:
A Radius funkció csak szinkron módban használható.
A feltételek és számítások a sugáron belüli aszinkron szakaszban végezhetők.
A sugár nem haladhatja meg az aktuális és a célhely közötti teljes távolság 1/2-át a mozgás végrehajtása előtt.
ex. Ha a mozgási távolság 100 mm, a rendelkezésre álló maximális sugár 50 mm.
A mozgások közötti keverést nem alkalmazó mozgási parancsok a következők: A keverés már alkalmazásra került ezekben a parancsokban, így a sugár alkalmazása ezekre a parancsokra és végrehajtása hibákat okoz. A parancsok, például a WaitMotion és a StopMotion használata segíthet a hibák elkerülésében.
MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
Keverési mód
Ez az opció határozza meg, hogy figyelmen kívül hagyja-e vagy felülírja-e az előző mozgást a következő mozgás keverési módjának megfelelően, ha a sugár az előző mozgás opciójaként van beállítva.
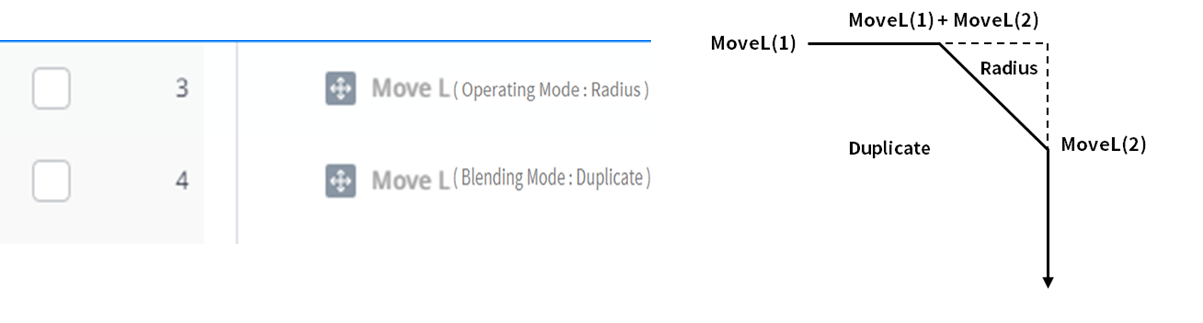
Ismétlődés
A Duplicate (Duplikáció) olyan mód, amely fenntartja az előző mozgást, hogy a következő mozgás átfedésben legyen az előző mozgással.
Hatálytalanítás
Az Override (Felülbírálás) olyan mód, amelyben a mozgás követését az előző mozgás figyelmen kívül hagyásával és felülírásával végzik.