
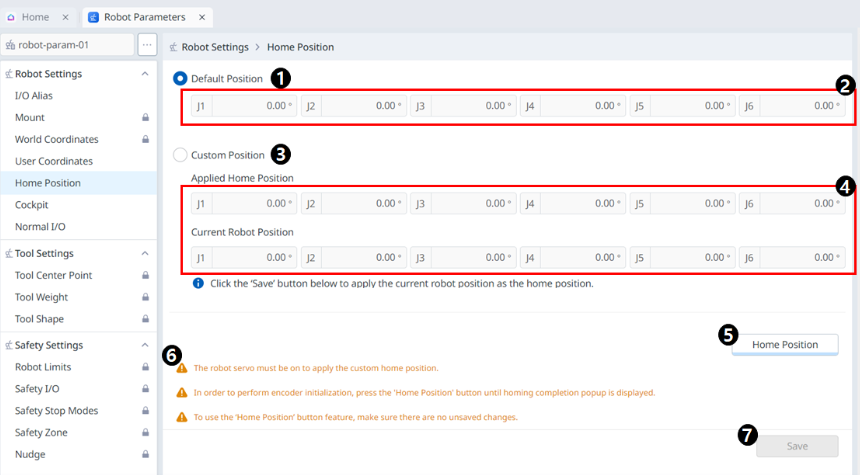
Home Position
Alaphelyzet
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Alapértelmezett pozíció opció | Ez az a rész, ahol kiválaszthatja az Alapértelmezett pozíció opciót. |
| 2 | Alapértelmezett pozíció érték | Ezek azok az értékek, amelyek megfelelnek az Alapértelmezett pozíciónak, amelyek mindegyike 0. |
| 3 | Egyéni pozíció opció | Ez lehetővé teszi az Egyéni pozíció opció kiválasztását. |
| 4 | Egyéni pozíció értéke | Ellenőrizheti az aktuálisan beállított egyedi pozíció értékét és a robot aktuális helyzetét. |
| 5 | Alaphelyzet | Ez a gomb lehetővé teszi az alapértelmezett pozíció vagy az egyéni pozíció beállítását, amelyet kezdőpozícióként állított be. |
| 6 | Figyelmeztető üzenet | Ennek beállításakor legyen óvatos. |
| 7 | Mentés | Ezzel a gombbal menthetők a beállítási értékek. |
Figyelmeztetés
Amikor egy robot vagy egy robot csatlakozása cserére kerül, az egyedi alaphelyzetet vissza kell állítani.
Cockpit
A közvetlen tanítást arra használják, hogy a robot végét a kezünkkel tartsuk, hogy a robotot a kívánt pozícióba toljuk és húzzuk, és a pózt az aktuálisan kiválasztott mozgásra alkalmazzuk. Két közvetlen tanítási módszer létezik.
Freedrive: Óránkénti időjárás előrejelzés Minden egyes ízület abba az irányba mozog, amerre a felhasználó erőt alkalmazott
Korlátozott mozgás: A robot végének mozgása vagy forgása csak a kényszerített mozgásban beállított irányban történik, még akkor is, ha az erő véletlenszerű irányból történik
Freedrive
A 1 gomb megnyomásakor a Freedrive mód aktiválódik, így a robot szabadon mozoghat. Minden egyes ízület abba az irányba mozog, amerre a felhasználó erőt alkalmazott. A robot nem mozgatható kézzel a gomb felengedése után.
A közvetlen tanítás során a robot LED ciánt villog.
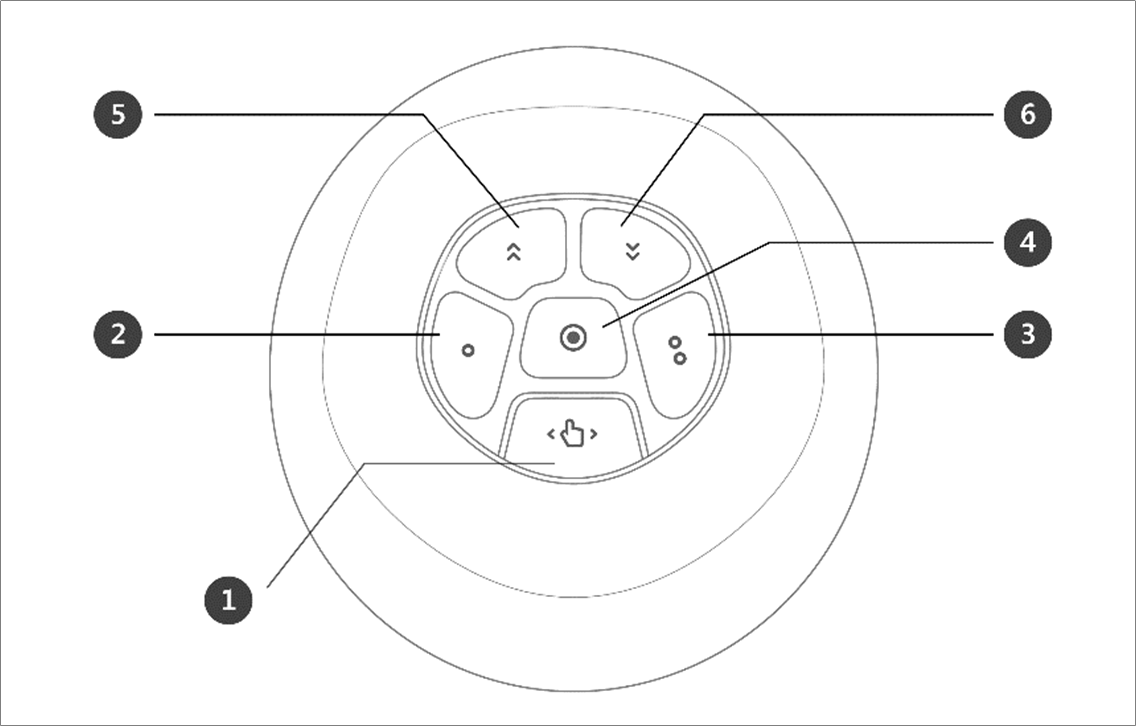
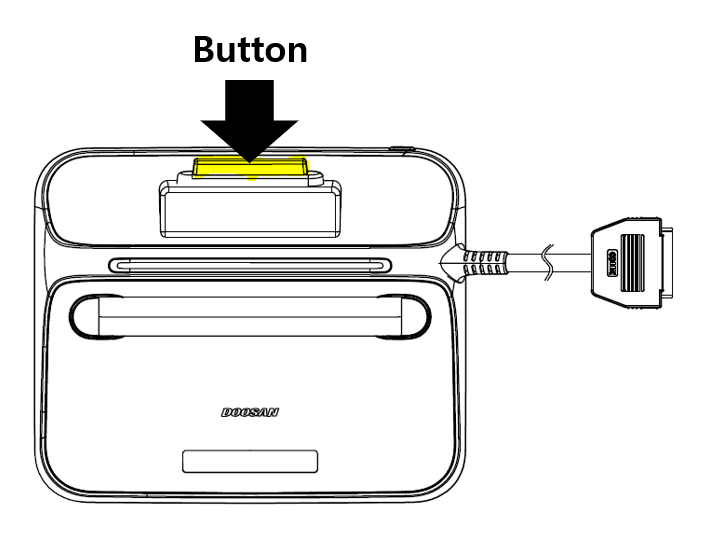
A tanítási medál hátoldalán található kézivezérlő gomb megnyomásával aktiválható a Freedrive mód, akárcsak a 1 gomb megnyomása, és a robot szabadon mozgatható.
Korlátozott mozgás
A 2. És a 3. Gomb megnyomásakor a robot vége csak a kényszer feltételének megfelelő irányba mozog, még akkor is, ha véletlenszerű irányból erőt fejtenek ki. A kényszerfeltétel a következő ábrán szereplő feltételek közül 2-vel állítható be: 4. Z-tengely kényszerített, sík fix kényszerített, felület korlátozott és irány korlátozott.
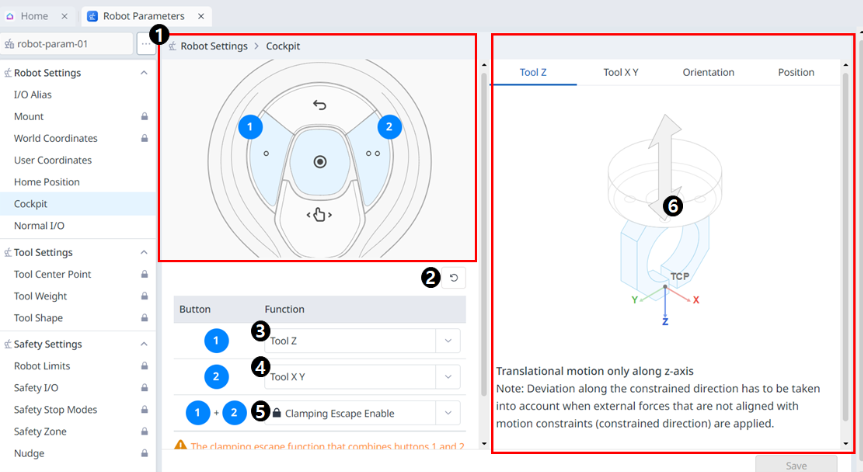
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Cockpit kép | Ez egy kép a Cockpit beállításokhoz. |
| 2 | Visszaállítás | Ezzel a gombbal inicializálhatja a beállított értékeket. |
| 3 | 1 gomb beállítása | Ez az a rész, ahol kiválaszthatja a 1 gombhoz beállítani kívánt funkciót. |
| 4 | 2 gomb beállítása | Ez az a rész, ahol kiválaszthatja a 2 gombhoz beállítani kívánt funkciót. |
| 5 | 1+2 gomb beállítása | Ez az a rész, ahol kiválaszthatja, hogy engedélyezi-e a 1+2 gombok rögzítését. |
| 6 | Irányító kép | Irányadó kép a pilótafülke-beállítási elemekhez. |
A Cockpit gomb állapotának megszerzése
A felhasználó tájékoztatást kaphat arról, hogy a Cockpit gombot megnyomták-e vagy felengedték-e.
A robot biztosítja a Cockpit gomb vezérlését, lehetővé téve a különböző alkalmazásokban való használatot.
A kommunikációs API-ban található „Monitoring Data” (Monitorozási adatok) a Cockpit gombbal kapcsolatos információkat tartalmazza.
Ha megnyomja a robot Cockpit gombját, vagy fordítva, a DRL API-n keresztül észlelheti.
DRL API: Get_cockpit_input (Kérjük, olvassa el a programozási kézikönyvet.)
Paraméterek: (int) index
Visszaküldés: (int) 1: Megnyomva (a gombot megnyomva), 0: Felengedve (a gombot nem nyomja meg)