Mi az a robot?
Az egyes robotsorozatok funkcionális korlátai
A különböző robotsorozatok (A, as, e, M/H, P sorozat) az alábbiak szerint korlátozzák a funkciók használatát:
Aktuális alapú: Az egyes csatlakozásokon található motor áramerősségét használják.
FTS-alapú: A robot végén található FTS (erőnyomaték-érzékelő).
JTS-alapú: JTS (közös nyomatékérzékelő) található minden csukló.
Jellemzők | A/e sorozat (áramalapú) | A sorozat S (jelenlegi, FTS-alapú) | M sorozat (JTS-alapú) | H sorozat (JTS-alapú) | P sorozat (JTS-alapú) |
|---|---|---|---|---|---|
Közvetlen tanítás
| O | O (áramalapú) | O | O | O |
Közvetlen tanítás
| X | O (FTS alapú) | O | O | O |
Ütközésérzékelés | O | O (áramalapú) | O | O | O |
Telepítés Pose Measurement | X | O (FTS alapú) | O | X (a robot csak a padlóra szerelhető) | X (a robot csak a padlóra szerelhető) |
Szerszámsúly mérése | X | O (FTS alapú) | O | O | O |
Munkadarab súlymérés | X | O (FTS alapú) | O | O | O |
Kiegyenlítés funkció | X | X | O | O | O |
Erőszabályozás | O (a beállítás csak három fordítási irányban érhető el, a forgatás kivételével) | O (FTS alapú) | O | O | O |
Megfelelőségi ellenőrzés | O (a beállítás csak három fordítási irányban érhető el, a forgatás kivételével) | O (FTS alapú) | O | O | O |
Az erő-figyelés funkcionális korlátai minden Robot sorozat esetében
A Teach medál és a DART-Studio használható az erőadatok monitorozására. A DRL parancs (check_Force_Condition()) az erőadatok külső monitorozására is használható.
Ha a raklapozási mód „BE” értékre van állítva: A kikapcsolt állapotban rendelkezésre álló vezérlési/felügyeleti funkciók a H, P sorozatú robotok kivételével rendelkezésre állnak.
Jellemzők | A/e sorozat (áramalapú) | A Series S (áramalapú és FTS-alapú) | M sorozat (JTS-alapú) | H sorozat (JTS-alapú) | P sorozat (JTS-alapú) |
|---|---|---|---|---|---|
Erőszabályozás | O (a beállítás csak három fordítási irányban érhető el, a forgatás kivételével) | O (FTS-alapú) | O | O | O |
O (ha a raklapozási mód „ON” (BE) értékre van állítva: Erőszabályozás kimenet korlátozott (alap Rx, Ry orientáció) 1) | O (ha a raklapozási mód „ON” (BE) értékre van állítva: Erőszabályozás kimenet korlátozott (alap Rx, Ry orientáció) 1) | ||||
Megfelelőségi ellenőrzés | O (a beállítás csak három fordítási irányban érhető el, a forgatás kivételével) | O (FTS-alapú) | O | O | O |
O (ha a raklapozási mód „ON” (BE) értékre van állítva: Megfelelőség-szabályozás kimenete korlátozott (alap Rx, RY orientáció) 1) | O (ha a raklapozási mód „ON” (BE) értékre van állítva: Megfelelőség-szabályozás kimenete korlátozott (alap Rx, RY orientáció) 1) | ||||
Kényszerített monitorozás (Tanítás medál) | X | O (FTS-alapú) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) |
O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) | O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) | ||||
Kényszerített monitorozás (DART-Studio) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (FTS-alapú) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) |
O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) | O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) | ||||
Kényszerített monitorozás (DRL parancsok használatakor: | O (a szingularitási szakasznál a „0” erő értéke látható) | O (FTS-alapú) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) | O (a szingularitási szakasznál a „0” erő értéke látható) |
O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) | O (ha a raklapozási mód „ON” (BE) értékre van állítva: 4-fokos szabadság az alapnak (x, y, z, Rz)) |
Vezérlési kimeneti határérték (alap Rx, RY tájolás): Az alap Rx, ry orientációnak megfelelő erő- vagy megfelelőség-ellenőrzési értékeknek megfelelő erő- vagy megfelelőség-ellenőrzési értékek nem kerülnek kibocsátásra. Az adott tengely (Rx alap, RY) erő- vagy megfelelőség-ellenőrzési értékének megadása figyelmen kívül lesz hagyva, mint „0”.
A szingularitás áttekintése
A többcsuklós robot szingularitása olyan pozícióra utal (vagy egy többcsuklós robot pontja olyan pozícióra (vagy pontra) utal, ahol a robot nehezen tudja kiszámítani a következő pozícióját mozgás közben. A többcsuklós robotok minden egyes csuklószöget kiszámítanak mozgás közben a robot végétől függően
Például, az ábra. 1 az alábbiakban, amikor a robot a piros pontig mozog, a robot nem tudja meghatározni, hogy az ízületeit mozgatja-e A pózhoz vagy A B pózhoz, amint az ábrán látható. 2. Ezt a pozíciót (vagy pontot) szingularitásnak nevezzük.
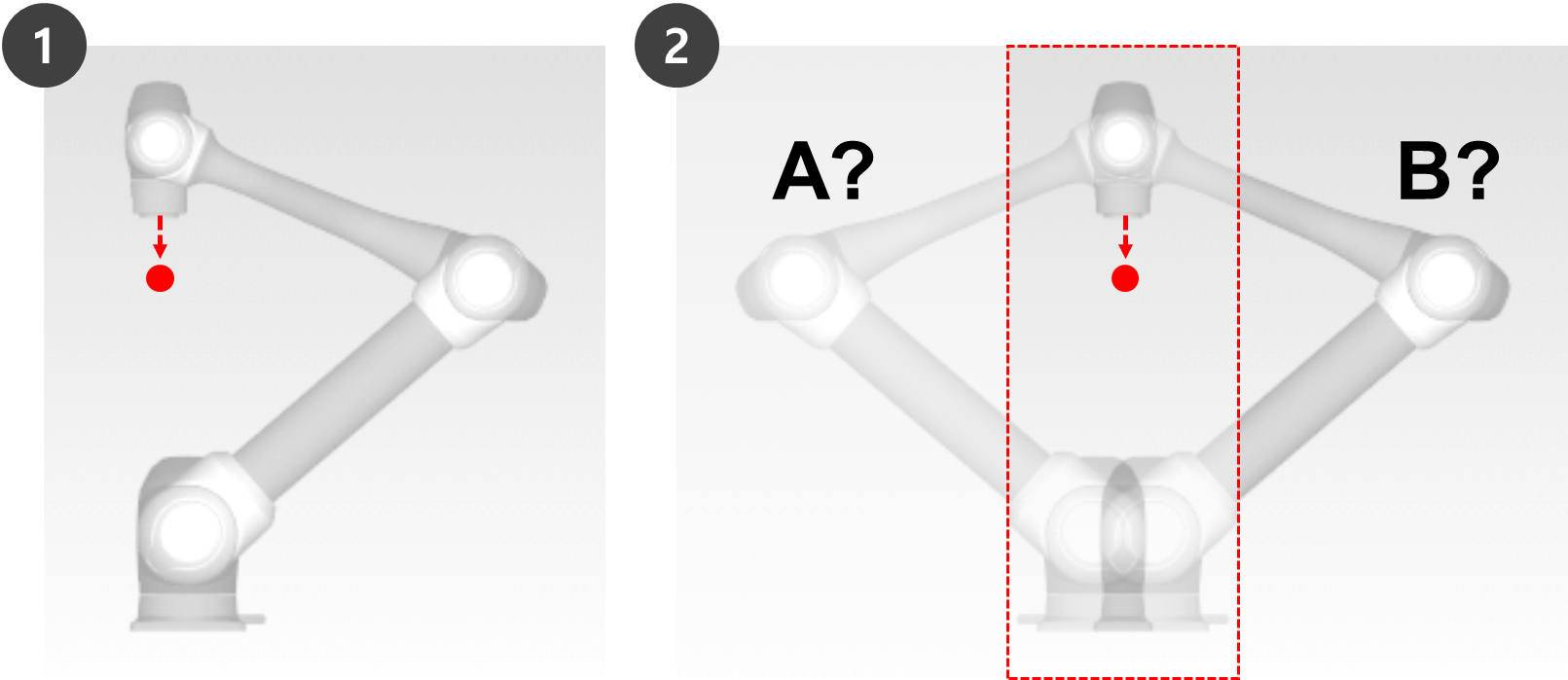
Szingularitás mellett a robot mozgása sík, pont és vonal szempontjából nem folyékony, a robot végének lineáris mozgása nem tartható fenn, és a vezérlési pozíció hibája fokozódhat. A szingularitás 3 esetben fordul elő, amint az a következő ábrán látható, beleértve azt is, amikor a robot csatlakozásai vonalat alkotnak.
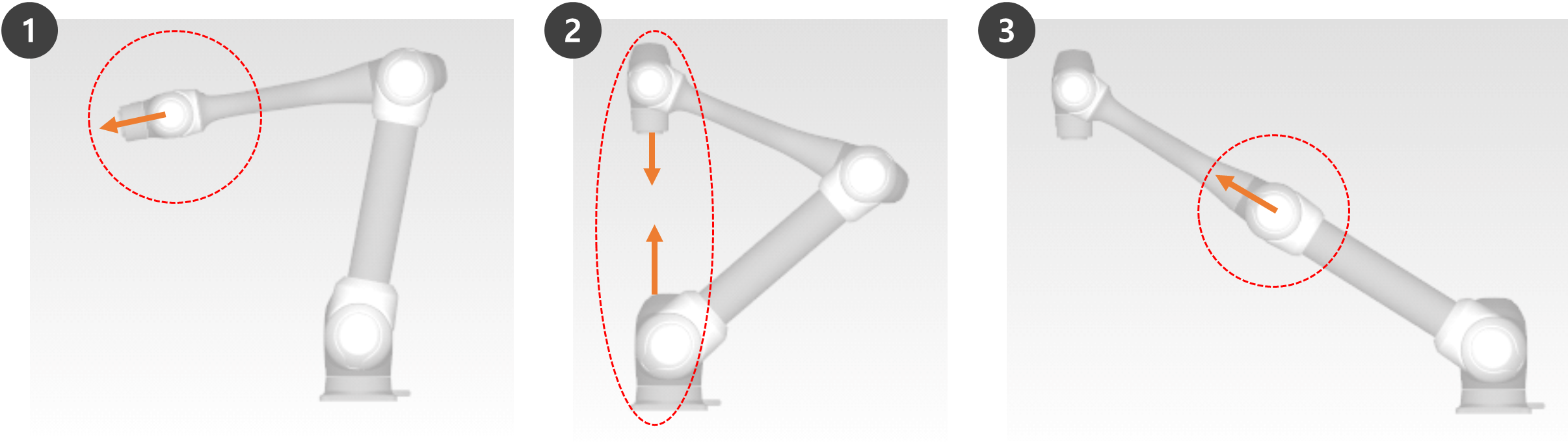
Csukló szingularitás: Amikor a robot csuklója egy vonalat képez, ahogy az 5. Tengely közeledik
Az emberi karhoz képest a 4., 5. És 6. Tengely a csuklócsuklónak felel meg.
Váll szingularitás: Ha az 1. És a 6. Tengely ugyanazon a vonalon van
Az emberi karhoz képest a 1. És 2. Tengely a vállízületnek felel meg.
Könyök Singularity: Amikor a robot egy vonalat alkot, ahogy a 3. Tengely közeledik
Emberi karhoz képest a 3. Tengely a könyöknek felel meg.
Vigyázat
A csukló forgásával járó manuális és automatikus műveleteket nem befolyásolja a szingularitás.
Feladat mozgás, MoveL parancs, stb.
A szingularitás csak manuális és automatikus működtetés esetén fordul elő, ahol a robot lineáris mozgást végez.
Közös mozgás, MoveJ parancsok, stb.
A szingularitási zónában az erőszabályozás vagy a megfelelőség ellenőrzése nem érhető el.
Mivel egyes tengelyek forgási sebessége gyorsan növekszik, amikor a lineáris mozgás áthalad egy szingularitáson, lehetséges, hogy a közös sebességhatár megsértése vagy a közös szöghatár megsértése következik be.
Hogyan kerüljük el a szingularitást
A Doosan Robotics robotok lehetőséget nyújtanak a szingularitások elkerülésére a mozgásvezérlés során. Javasoljuk azonban, hogy olyan feladatot konfiguráljon, amely nem hoz létre kivételeket közös mozgási parancsokkal, például a MoveJ-vel a szingularitási zónákban.
Itt vannak a Doosan Robot által biztosított szingularitás elkerülési lehetőségek:
Automatikus elkerülés: Mozgást hajt végre a szingularitások elkerülésével. A robot mozgása azonban eltérhet a várt útvonaltól.
Útvonal-prioritás: Fenntartja az útvonalat és a sebességet, de leállhat egy szingularitás körüli hiba miatt.
Változtatható sebesség: Fenntartja az utat, de lassul a szingularitás közelében.
Az Euler-szög áttekintése
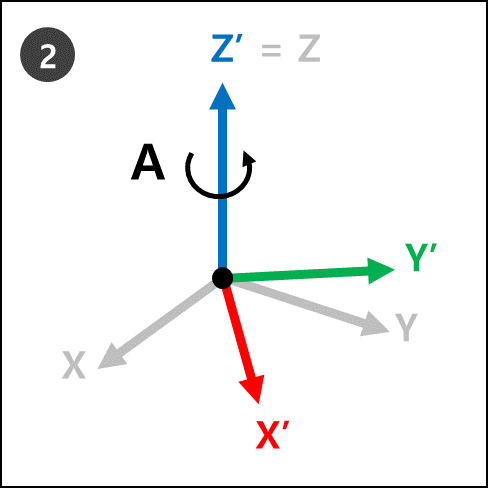
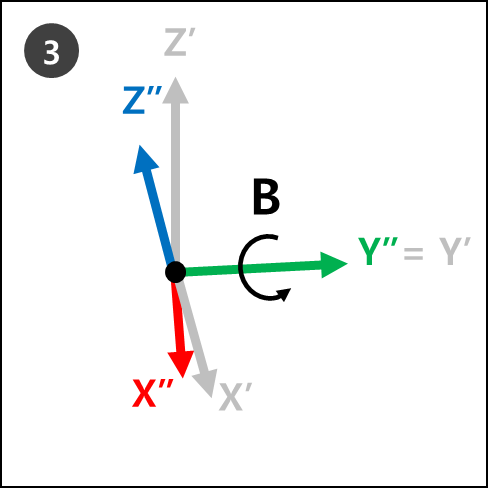
Az Euler-szög az X, Y és z tengely szögeinek kifejezésére szolgál, amelyek a tárgy irányában merőlegesek egymás között. A, B és C a szekvenciális forgatási szögekre vonatkozik. Minden robotgyártó másképp határozza meg ezt a A, B és C forgási rendet, mint például az Rz-Rz, Rz-Ry-Rx vagy Rx-Rz.
Például Rz-Ry-Rx. Itt az Rz a z-tengely forgását jelenti, az ry az Y-tengely forgását, az Rx pedig az X-tengely forgását. Az RZ A szögben, az RY B szögben, az Rx C szögben fejezhető ki, jelezve az objektum aktuális forgási irányát. Ne feledje, hogy ha a forgás z-tengely irányban történik a koordinátáktól, a forgások az új koordináták alapján történnek.
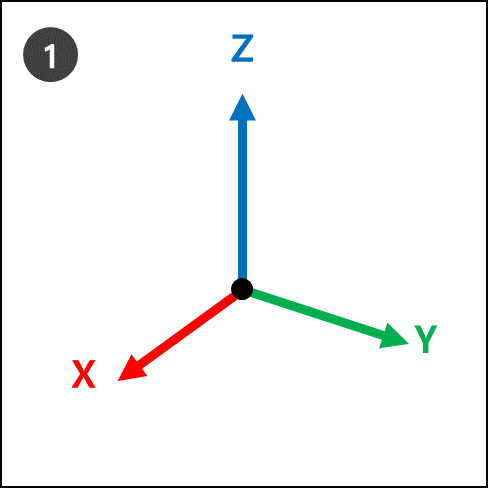
Ez a 1-4. Lépésekkel jeleníthető meg.
 |
 |
 |
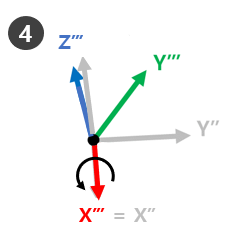 |
A 4. Lépés új koordinátái (z’’’’, Y’’’’, X’’’’’’’’’’’ A robot aktuális forgására vonatkoznak, amikor az Euler A, B és C szögeit alkalmazzák.
Ez könnyen megjeleníthető a jobb kezével. Tegye a következő pózt a jobb kezével. Ezt jobb oldali szabálynak nevezik, és ha a hüvelykujj (X-tengely), az indexujj (Y-tengely) és a középső ujj (z-tengely) egymásra merőlegesek, akkor X, Y és z tengelyekből álló koordinátákat hoz létre.
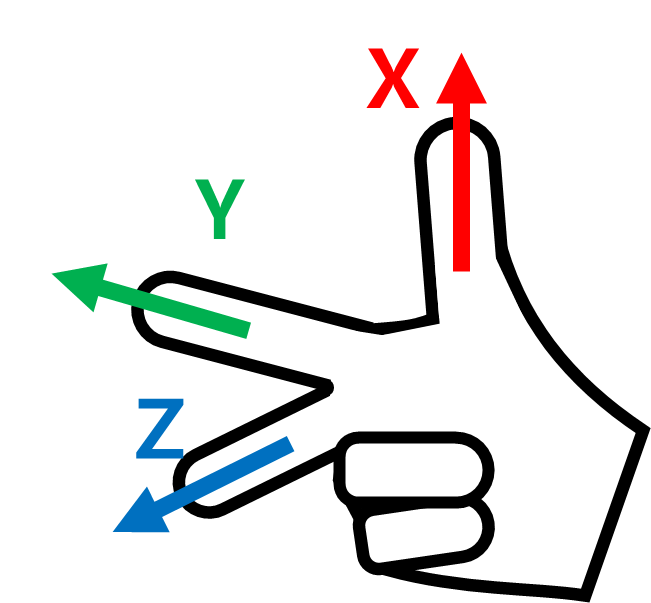
Ezután végezze el a jobb oldali szabály Cartesian Pose és forgatások Rz, Ry és Rx szekvenciális sorrendben.
RZ: Forgassa el a középső ujját (z-tengely) fokkal.
Ry: Forgassa el az indexujjat (Y-tengely) B fokkal.
Rx: Forgassa el a hüvelykujját (X-tengely) C fokkal.
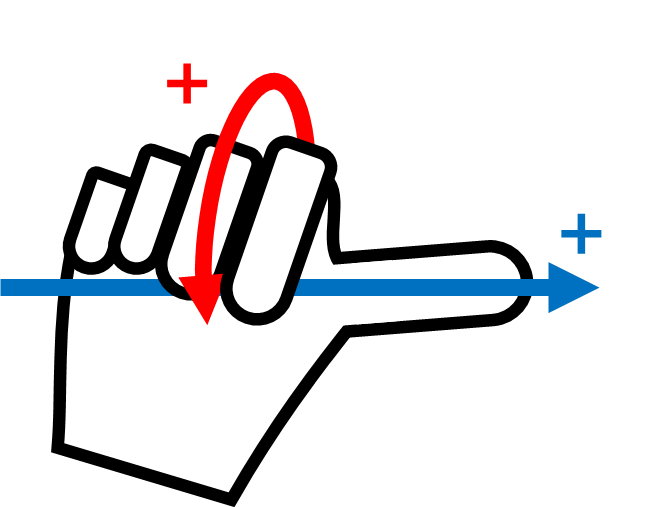
Megjegyzés
Az A, B és C + forgási irányának + forgási iránya a hüvelykujj kivételével négy ujj iránya, amikor a hüvelykujj a + irányba mutat, és a négy ujj be van szorítva. Ezt nevezik az óramutató járásával megegyező csavar törvényének.