
Készen áll a robot telepítésére
A robot javítása
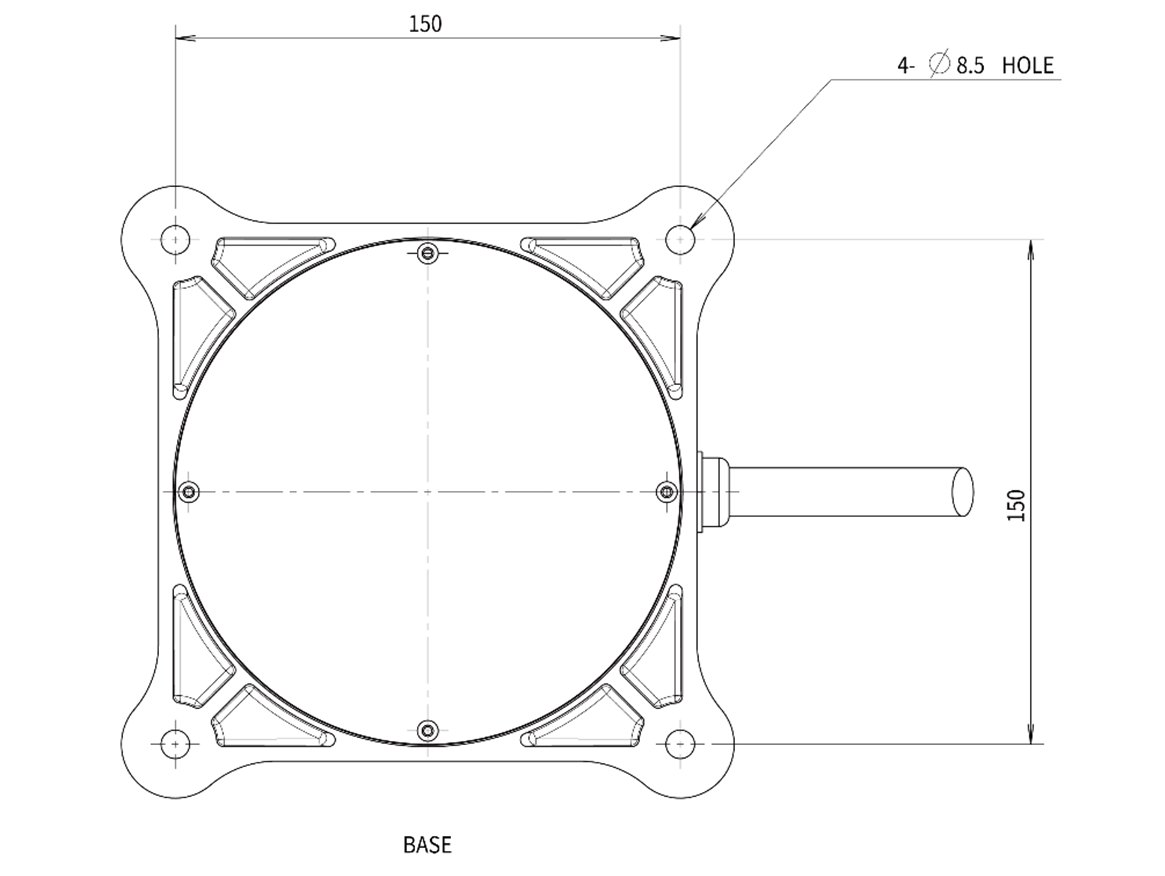
A robot rögzítéséhez használjon M8 csavart a manipulátor alapján lévő négy 8,5 mm-es furatban.
A csavarok meghúzásához ajánlott 20 Nm meghúzási nyomatékot használni. Használjon alátéteket (rugó-lapos), hogy megakadályozza a rezgés általi meglazulást.
A Φ5 segítségével helyezze el a jelölő csapokat a robot rögzített helyre történő pontos beszereléséhez.
A manipulátor alaprajzát és négy M8 csavart használja, egység [mm]
Figyelmeztetés
Húzza meg teljesen a csavarokat, hogy a manipulátor működése közben ne lazuljon meg.
Szerelje fel a manipulátor alapot egy szilárd felületre, amely ellenáll a működés során keletkező terhelésnek (a maximális nyomaték 10-szerese és a robot súlyának ötszöröse).
A robot a manipulátor alaprezgését ütközésként értelmezi, és bekapcsolja a vészleállást. Ezért az automatikusan eltolódó pozíciójú telepítési helyeken ne szerelje fel a robotbázist nagy mozgású gyorsulással rendelkező helyre.
Szerelje fel a manipulátor karját egy adott helyre a megfelelő módszerekkel. A rögzítési felületnek szilárdnak kell lennie.
A manipulátor megsérül, ha hosszabb ideig érintkezik vízzel. Ne működtesse a robotot olyan körülmények között, amikor az nedves vagy víz alatt lehet.
Helyezze el a kábelt
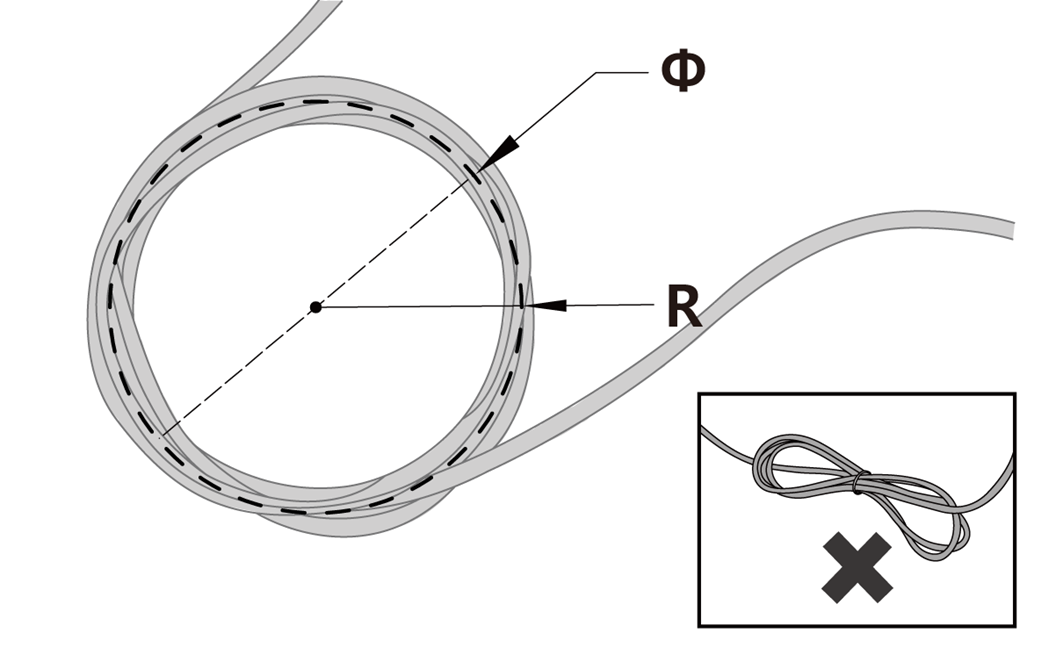
Ellenőrizze, hogy a kábelek görbülete nagyobb-e, mint a minimális görbületi sugár. Az egyes kábelek minimális görbületi sugara a következő:
Kábel | Minimális görbületi sugár (R) |
|---|---|
Tanítsa meg a függő kábelt | 120 mm |
Robot kábel | 120 mm |
Vigyázat
Győződjön meg arról, hogy a Teach medál kábel és a Teach medál csatlakozó közötti görbületi sugár nagyobb, mint a minimális görbületi sugár.
Ha a görbületi sugár kisebb, mint a minimális görbületi sugár, a kábel leválhat, vagy a termék károsodhat.
Olyan környezetben, ahol elektromágneses zaj fordulhat elő, a hibás működés elkerülése érdekében megfelelő kábeltelepítést kell végezni.