
A Feladatszerkesztő parancs compliance/Force Control koncepciójának áttekintése
Az erőszabályozás és a megfelelőség-ellenőrzés olyan funkciók, amelyek a robot erejét szabályozzák. Továbbá, a mozgás parancsok hozzáadásával az erő a mozgás készítésével egy időben vezérelhető. A Compliance Control és a Force Control a következő eltéréseket tartalmazza.
Megfelelőségi ellenőrzés
A Compliance Control esetében a robot megfelel a robot TCP végén lévő külső erőnek, és amikor a külső erőt eltávolítják, erőt generálnak, hogy a robotot vissza lehessen mozgatni oda, ahol lennie kell.
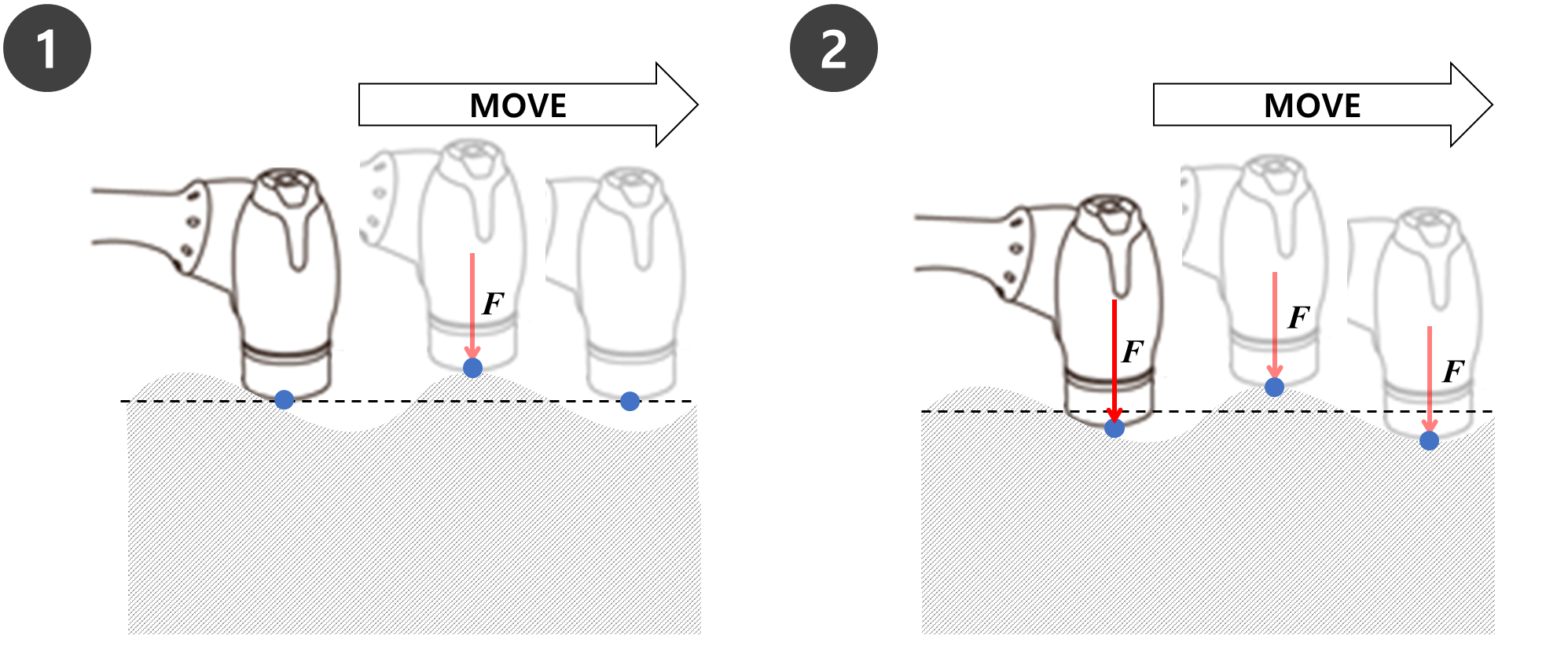
Ez a megközelítés akkor alkalmazható, ha egy robot egyenes vonalban mozog egy rögös felületen, és biztosítani szeretné, hogy a robot anélkül mozogjon, hogy kárt okozna magának vagy a felületnek. Ez a munkadarabok közelében bekövetkező váratlan ütközések megelőzésére is használható.
Erőszabályozás
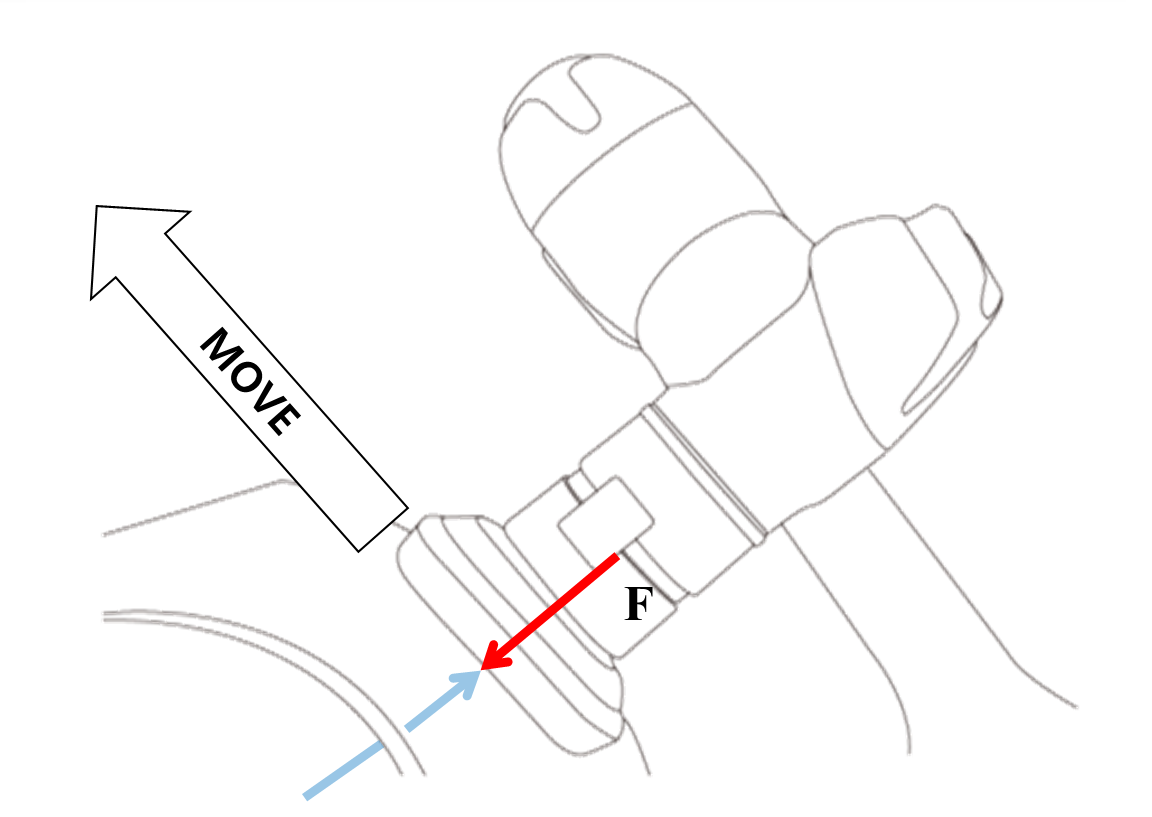
Erő-szabályozás esetén az erő a robot végén a TCP-re kerül. A gyorsulás abban az irányban keletkezik, amelyben az erő keletkezik, ami a robot egyidejűleg mozog az erő irányába a mozgás iránya mellett.
Amikor a robot érintkezésbe kerül egy objektummal, az erő addig hatol az objektumra, amíg a beállított erő és az objektum taszító ereje egyensúlyban van
Ez a megközelítés akkor alkalmazható, ha egy robot egyenes vonalban mozog egy rögös felületen, és biztosítani szeretné, hogy állandó erő kerüljön a felületre. Ez olyan feladatokhoz is használható, amelyek állandó erővel, azaz polírozással történő nyomást igényelnek a robottól.
Megjegyzés
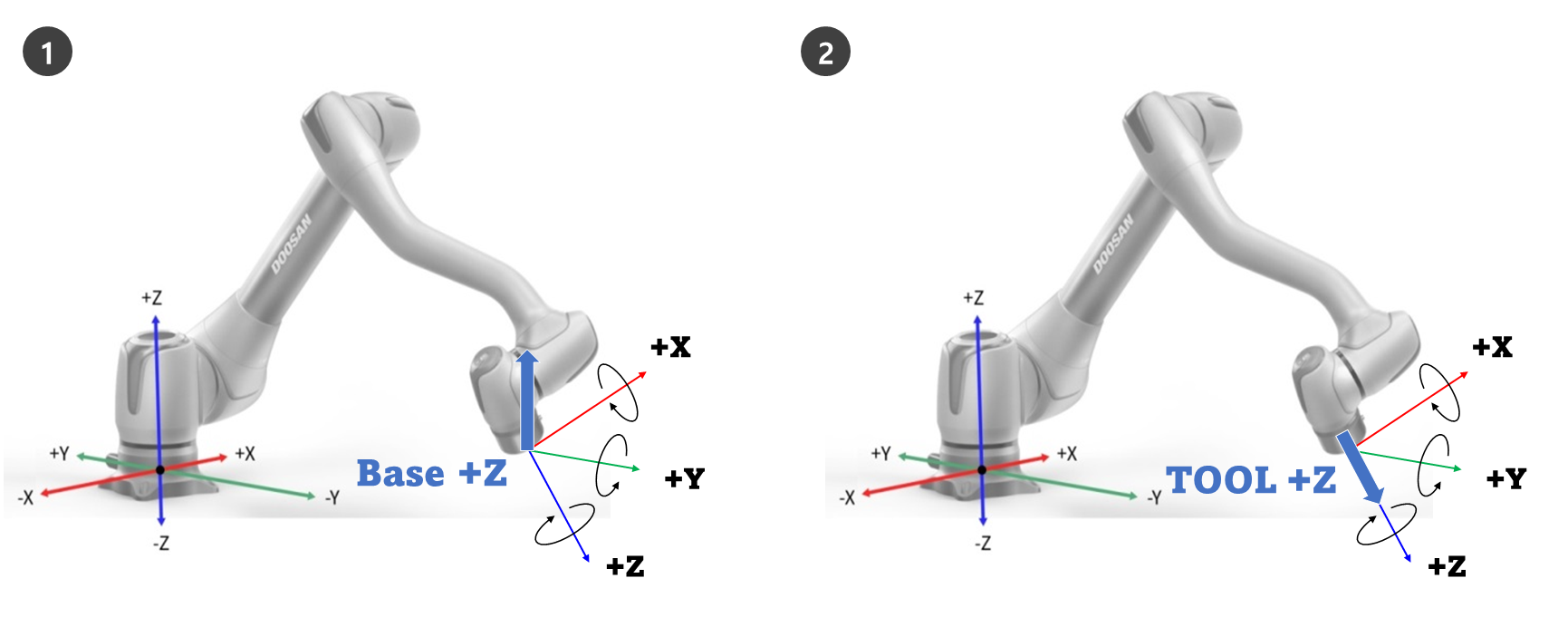
A Compliance és Force parancsok végrehajtása az aktuális koordináták alapján történik. Egy feladat alapértelmezett koordinátája a Base coordinates (Alap koordináták), és a koordináták a Set paranccsal módosíthatók.
Ábra A 1 az a működési irány, amikor a +z irányú erő-/megfelelőség-szabályozást alkalmazzák az alapkoordinátákon.
Ábra A 2 az a működési irány, amikor a szerszám koordinátáira a +z irányú erő-/megfelelőség-szabályozást alkalmazzák.
Megfelelőségi ellenőrzés
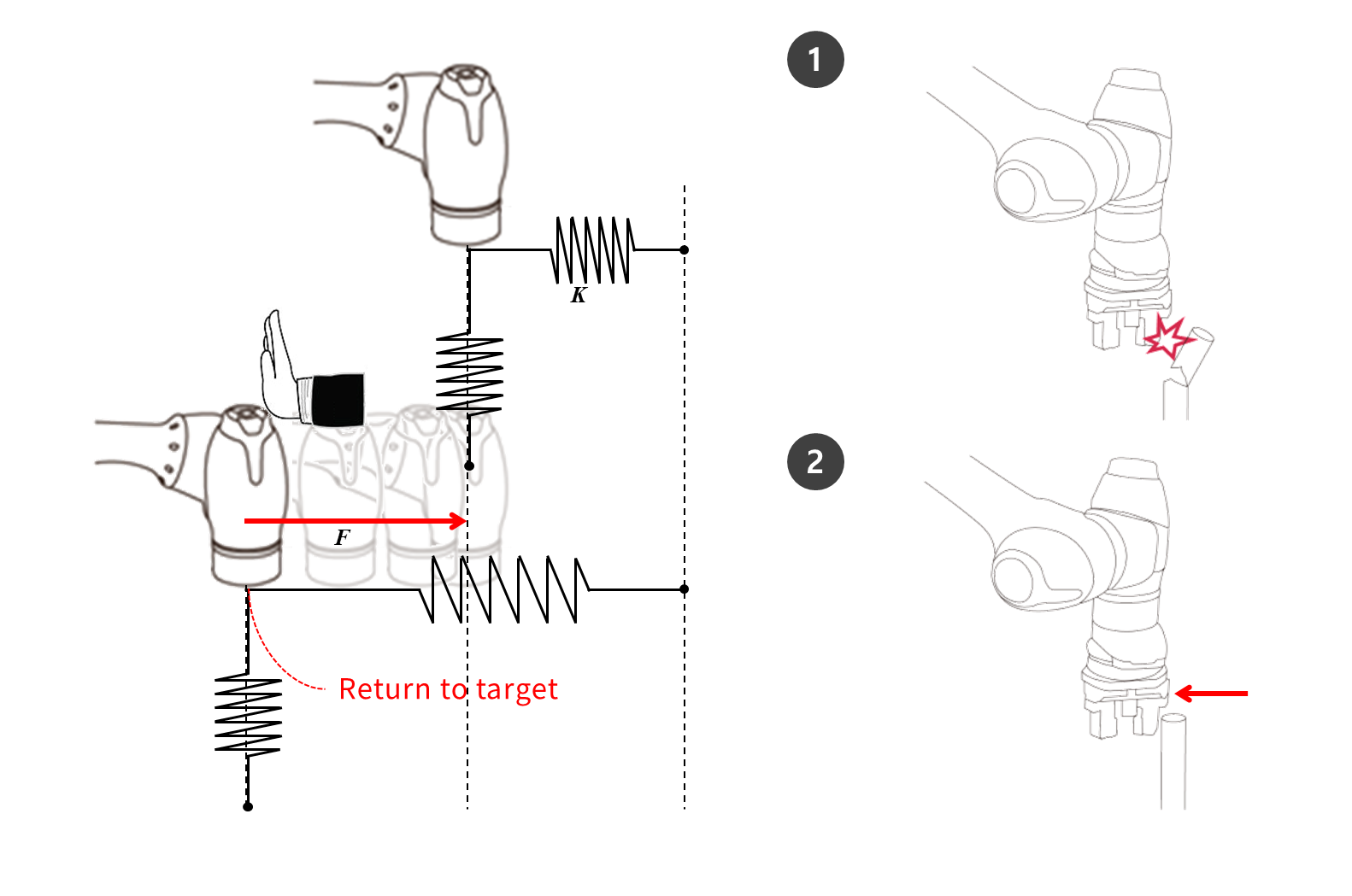
A megfelelőség-ellenőrzés az a funkció, amely megfelel a külső erőnek a beállított merevség szerint, amikor a robot végén erőt fejtenek ki a TCOP-ra. Kiegyensúlyozza az erőket a célponton, és ez egy olyan ellenőrzési módszer, amely taszító erőt generál, ha az elmozdulás a kiegyenlítő ponttól távol történik. A megfelelőség ellenőrzése során a robot vége rugóként pattan.
Ha ütközés történik, amikor a mozgásvezérlést egyedül használják, lehetséges, hogy az ütköző tárgy megsérül.
A Doosan Robotics robotok ütközéskor biztonságosan megállnak, de a felhasználói beállításoktól függően, mint például a Biztonsági határértékek > Ütközésérzékenység, a következő helyzetek fordulhatnak elő.
Ha a megfelelőség-ellenőrzés be van kapcsolva a mozgásvezérlés során, a robot mozog, miközben megfelel az ütköző tárgynak.
Ha F a külső erő, K a merevség és X a távolság, a következő képletek igazak.
F = K * X
K = F / X
X = F / K
A fenti képletek alapján, ha a megfelelőség-ellenőrzés merevsége 1000 N/m-re van állítva, és ha a robot 1 mm-re mozog, a generált külső erő 1N.
F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Megjegyzés
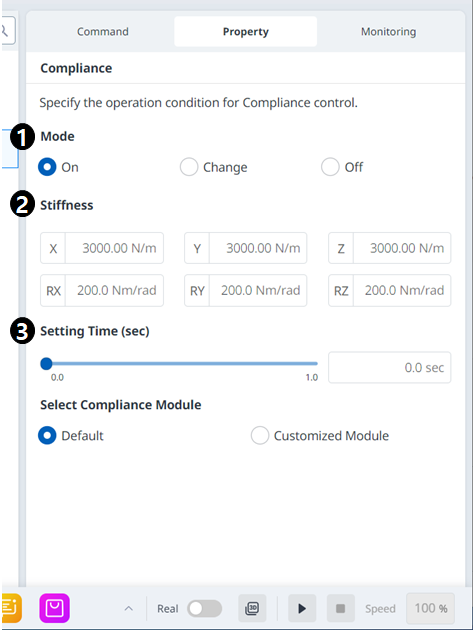
A Property of Compliance Command (Megfelelőségi parancs tulajdonságán) a következő értékek állíthatók be:
Mód
Be: Lehetővé teszi a megfelelőség ellenőrzését
Módosítás: Ha a compliance (Megfelelőségi) mód be van kapcsolva, az merevségre vált
Ki: Letiltja a megfelelőségi ellenőrzést
Merevségi tartomány
M/H sorozat: Fordítás (0 ~ 20000N / m), forgás (0 ~ 1000nm / rad)
A sorozat: Fordítás (0 ~ 10000N / m), forgás (0 ~ 300Nm / rad)
Az alacsonyabb merevségi értékek gyengédebben reagálnak a külső erőre, és több időt igényelnek a célpontra való visszatéréshez
Az idő beállítása
Az aktuális merevségi érték eléréséhez szükséges idő (0-1s)
Vigyázat
Az eszköz súlyát és a TCP-t (Tool Center Point) pontosan be kell állítani. A pontatlan szerszámsúly miatt a robot külső erőként érzékeli a szerszám súlyát, és a Compliance Command On (Megfelelőségi parancs be) beállítása helymeghatározási hibát eredményez.
A ruhacsomag feszessége külső nyomatékot eredményezhet a roboton. Ezért legyen óvatos, amikor behelyezi a ruhát.
A megfelelőség nem kapcsolható be vagy ki aszinkron mozgás vagy keverési mozgás közben.
A Compliance Command On (Megfelelőségi parancs be) alatt csak lineáris mozgás engedélyezett. Közös indítványok, mint például a MoveJ és a MoveSJ, nem megengedettek.
A Compliance Command On (Megfelelőségi parancs be) alatt az eszköz súlya vagy a TCP nem módosítható.
A Compliance Command On (Megfelelőségi parancs be) alatt lehetséges, hogy a mozgás végrehajtása során keletkező nyomaték betartása miatt nem lehet pontosan elérni a célpontot. Ezért ajánlott a célpont közelében bekapcsolni a megfelelőségi ellenőrzést. Vagy lehetőség van a pozícióhiba minimalizálására egy nagy merevségi érték beállításával.
Erőszabályozás
Az erőszabályozás egy olyan funkció, amely az erőszabályozás irányában erőt alkalmaz, amíg a beállított erő és a taszító erő egyensúlyba nem kerül
A robotot a beállított erő irányába mozgatja, és ha érintkezik egy tárggyal, fenntartja a bevitt erőt (N)
Képes az erő irányától eltérő irányban történő mozgásvezérlésre, állandó erő alkalmazása mellett
A minimális beállítás +/- 10N, és 0,2 N felbontással finomhangolható
Az erőszabályozás nem érhető el a szingularitási zónában
n Általában a Compliance Control az erőszabályozással együtt használatos, így az erőszabályozás megfelel a külső erőnek
Megjegyzés
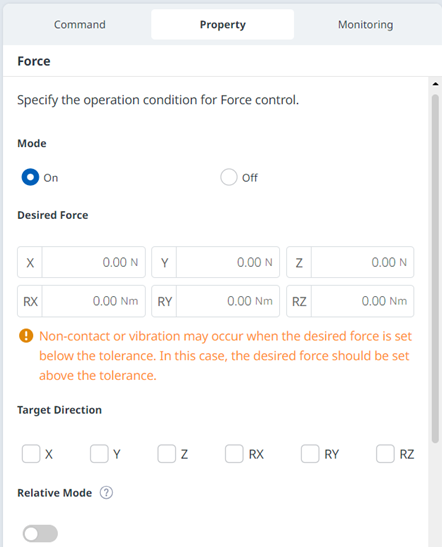
A Force Command tulajdonságból a következő értékek állíthatók be.
Mód
Be: Engedélyezi az erőszabályozást
Ki: Az erőszabályozás letiltása
A kívánt erőtartomány
X, Y, Z: 10 - (minden robot maximális) N
A, B, C: 5 - (minden robot maximális) Nm
A maximális erőkifejtéssel kapcsolatos további információkért tekintse meg a Biztonsági paraméterek felső/alsó küszöbértéke és alapértelmezett értéke című részt.
Célirány
Az egyes irányok kiválasztott célértékére lép.
Többszörös kiválasztás végezhető.
Az erőszabályozás csak az erőbeállítás utáni iránybeállítással hajtható végre.
Ha a több kiválasztott irány egyike eléri a célerőt, akkor addig mozog, amíg a másik irányba el nem éri a célértéket.
Relatív mód
Ha ez az üzemmód engedélyezve van, akkor a robotra ható külső erőt 0-ra kalibrálja, hogy javítsa az erőszabályozás pontosságát.
Ha a relatív mód le van tiltva, a célpontra ható tényleges erő megegyezik a beállított erő és a külső erő összegével.
Ha a relatív mód engedélyezve van, a célpontra ható tényleges erő megegyezik a beállított erővel.
Az erőszabályozás során a póztól vagy a külső erőtől függően eltérés léphet fel.
Az erőszabályozás során lehetséges, hogy nem éri el a pontos célpontot. Ezért ajánlott a célpont közelében az erőszabályozás engedélyezése.
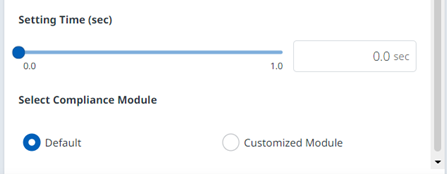
Az idő beállítása
Az aktuális erőérték eléréséhez szükséges idő (0-1s)
Menetparancs
A témakörök létrehozhatók és végrehajthatók a feladatszerkesztőben.
Megjegyzés
A szálakra vonatkozó korlátozások a következők:
A szál neve nem kezdődhet számmal, és csak kisbetűket, számokat és aláhúzásokat tartalmazhat. A név nem haladhatja meg a 30 karaktert, vagy egy másik Thread névvel kell duplikálni.
A feladatszerkesztő képernyőn, amikor rákattint a menet parancsra, mind a menet parancs, mind az End Thread parancs hozzáadódik a feladatlista panelhez. Feladatonként legfeljebb négy szál engedélyezett.
A következő parancsokat nem lehet egyedül konfigurálni, és feltételes utasításokon belül kell végrehajtani:
Mozgatás, L mozgatás, J mozgatás, SX mozgatása, SJ mozgatása, C mozgatása, Mozgás B, Mozgás Spirál, Mozgás periodikus, Mozgás JX
Define, Set, Sub, Thread, Break, Súlymérés
Erőszabályozás parancsok (compliance, Force)
Jelparancsok (jel hozzáadása, jel beállítása, jel felvétele, jel törlése)
Speciális parancsok (kézi útmutató, kiegyenlítés)
Felhasználói parancsok