
Az alhívás/alhívás áttekintése
A sub a subrutine rövidítése. Egy alrutin olyan folyamatra utal, amely minimalizálja a program lépéseinek számát a szükséges alkatrészek hívásával, amikor két vagy több ismétlődő rész van jelen.
A Doosan Robotics robotok CallSub parancsot adnak az alparancsok és a megfelelő albekezdés hívására.
A Python-ban definiált alparancsfüggvényeket.
Megjegyzés
Az albekezdést a MainSub-ban, a főbekezdés elején és az EndMainSub-ban, a főbekezdés végén kell hozzáadni.
Az ismétlésen kívül az Alparancs a Főbekezdés egyszerűsítésére is szolgál. Az Alparancs használata lehetővé teszi, hogy intuitív módon azonosítsa, hogy a Főbekezdés melyik feladata történik jelenleg.
Az alparancs használata lehetővé teszi az albekezdésegység tesztelését.
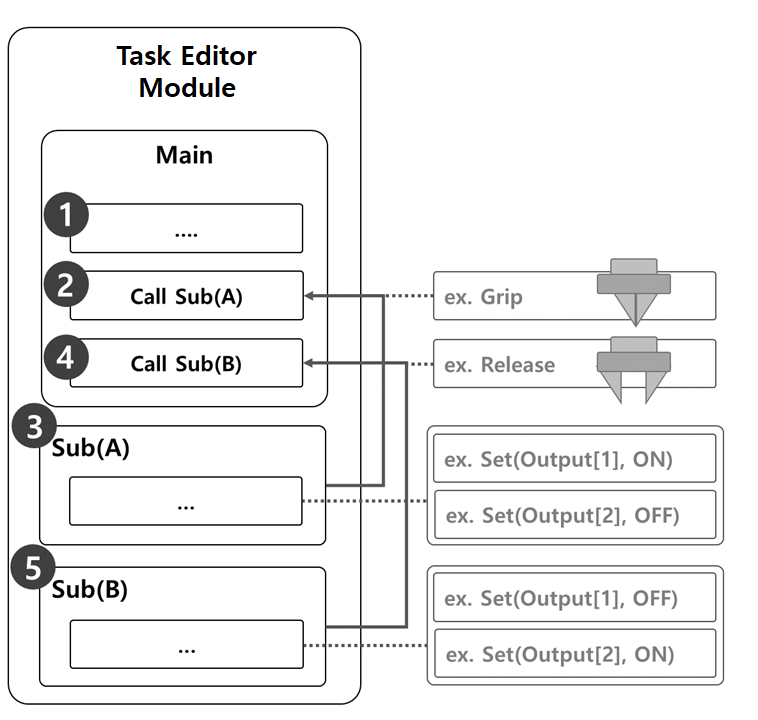
Az a minta, ahol egy alparancsot használnak a markolat végrehajtására és a robot megfogójának mozgásainak kioldására, a következőkből áll.
A Főbekezdés sorai az első sortól kezdve szekvenciális sorrendben hajtják végre a feladatprogramot.
Lépjen a Call Sub által hívott Sub(A)-ra.
Minta
Program: Hívja a Grip szubrutint.
Robot: Nincs mozgás
A(z) (A) végrehajtásra kerül. Minden albekezdéssor szekvenciális sorrendben kerül végrehajtásra, visszatér a főbekezdéshez, és végrehajtja a következő sort.
Minta
Program: Végezze el a Grip alrutin sorokat szekvenciális sorrendben. A Set (Beállítás) paranccsal állítsa be az Output (kimenet) [1] beállítást ON (BE), a Output (kimenet) [2] pedig OFF (ki)
Robot: A robot megfogója a markolat mozgását hajtja végre.
Lépjen a Call Sub által hívott Sub(B) pontra.
Minta
Program: Hívja a Release Subrutint.
Robot: Nincs mozgás
A(z) (B) végrehajtásra kerül. Minden albekezdéssor szekvenciális sorrendben kerül végrehajtásra, visszatér a főbekezdéshez, és végrehajtja a következő sort.
Minta
Program: Végezze el a Grip alrutin sorokat szekvenciális sorrendben. A Set (Beállítás) paranccsal állítsa be a Output (kimenet) [1] beállítást OFF (ki), a Output (kimenet) [2] pedig ON (BE)
Robot: A robot megfogó végrehajtja a kioldó mozgást.
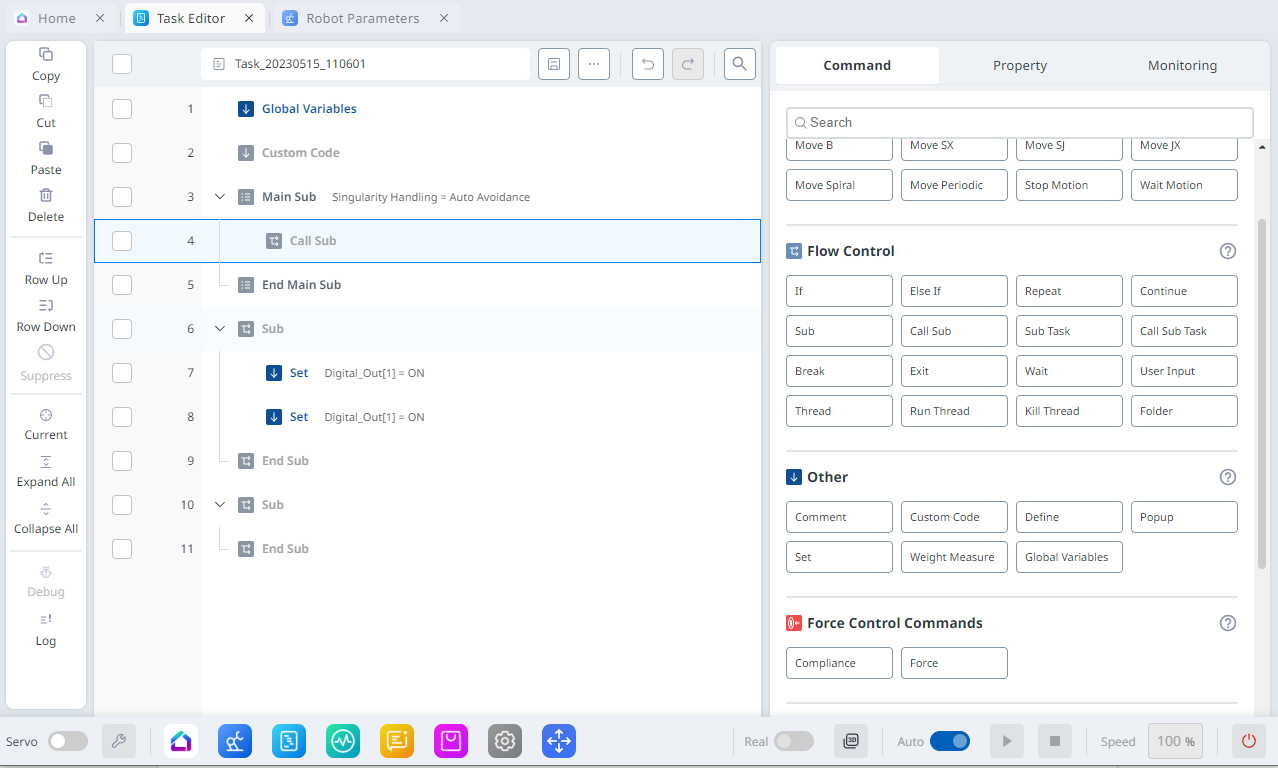
Alparancs hozzáadása
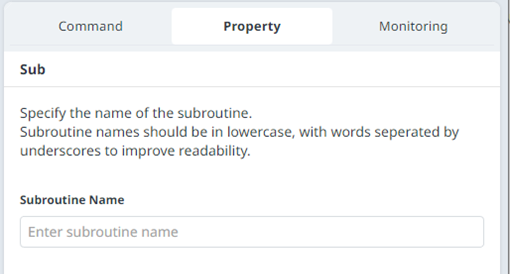
A Feladatszerkesztő modulban, a jobb oldali parancs menü Áramlásszabályozás szakaszában adjon hozzá egy alparancsot.
Adja meg az alrutin nevét.
Add CallSub parancs
A Feladatszerkesztő modulban, a jobb oldali parancs menü Áramlásszabályozás szakaszában adjon hozzá egy Hívásalparancsot.
Válassza ki az Alparanccsal regisztrált alrutinnevet.
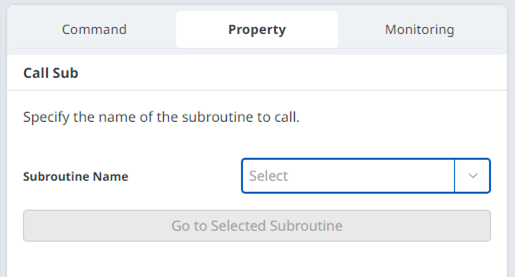
Megjegyzés
Ha a sorok száma növekszik a feladatprogramban, akkor nehéz lehet megtalálni a szubrutinokat. Ebben az esetben érintse meg a Go to Selected alrutint a CallSub tulajdonságában a fókusz áthelyezéséhez a megfelelő Alparancssorba.