
A panel áthelyezése
Menü
Elemek | Leírás | |
|---|---|---|
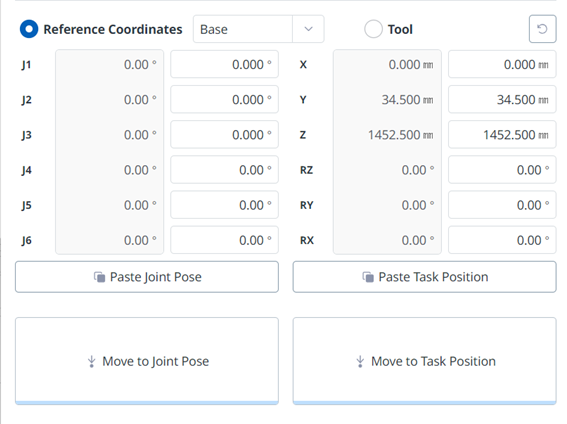
16 | Válassza ki a referencia koordináta-rendszert | Válassza ki a 18. Ábrán a feladat koordinátáihoz használandó referenciaszintet. Választhat Base, World vagy User Coordinates. |
17 | Közös testtartás | Megjeleníti a robot aktuális testtartását és a célcsukló testtartását. |
18 | Feladattartás | Megjeleníti a robot aktuális testtartását és a kiválasztott referenciaméret-rendszerhez illeszkedő célfeladat-testtartást. |
19 | Illessze be a közös testtartást | Illessze be a vágólapra másolt testtartás értékét az ízületi testtartás panelbe. |
20 | Feladat testtartás beillesztése | Illessze be a vágólapra másolt testtartás értékét a feladattartás panelbe. |
21 | Közös mozgatás gomb | Ezzel a gombbal a robot a célcsukló testhelyzetbe kerül. |
22 | Feladat áthelyezése gomb | Ezzel a gombbal a robot a cél feladattartásba kerül. |
Állítsa be a szöget a mozgáshoz
A robot meghatározott szögben történő mozgatásához kövesse az alábbi lépéseket:
Válassza az Áthelyezés fület.
Adja meg a robotcsukló célszögét. (A J4 le van tiltva a P sorozatú modelleknél)
Engedélyezze a valódi módot.
Érintse meg és tartsa lenyomva a Move to Related Joint Pose gombot a robotcsukló szögének beállításához.
Az alapreferencia-koordináták beállítása áthelyezésre
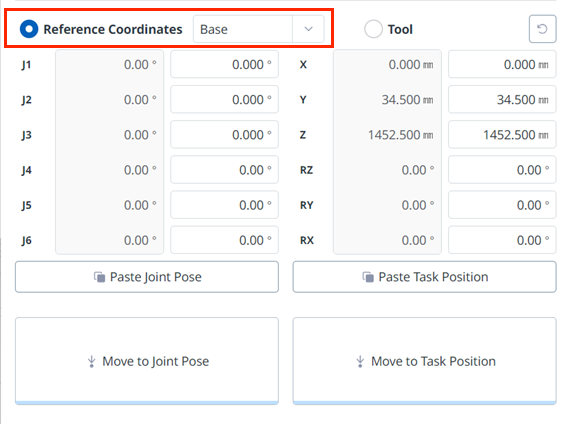
A robot alapkoordinátái alapján történő mozgatásához kövesse az alábbi lépéseket:
Válassza ki az Áthelyezés lapot és a referencia koordinátákat.
Válassza ki a kijelző koordinátáját alapként.
Érintse meg és tartsa lenyomva az Áthelyezés a megfelelő feladatpózra gombot a beállított koordináták eléréséhez.
A világkoordináták referencia koordinátáinak beállítása áthelyezésre
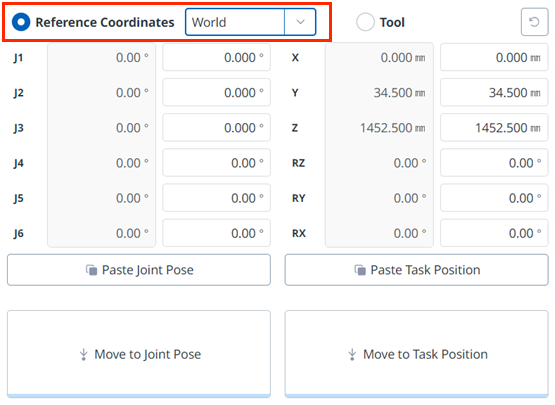
Ha a robotot a világkoordináták alapján szeretné mozgatni, kövesse az alábbi lépéseket:
Válassza ki az Áthelyezés lapot és a referencia koordinátákat.
Válassza a Világ lehetőséget a megjelenítési koordináták közül, és válassza a Világ lapot.
Állítsa be a pózt mozgatni a világ koordinátáira való hivatkozással.
Érintse meg és tartsa lenyomva az Áthelyezés a megfelelő feladatpózra gombot a beállított koordináták eléréséhez.
Koordináták beállítása az eszköz alapján történő mozgatáshoz
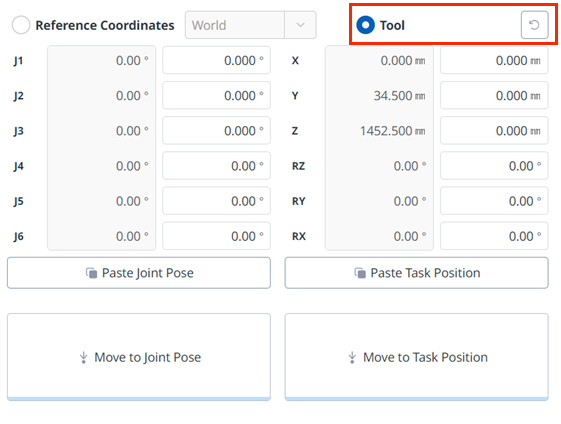
A robot szerszám koordinátái alapján történő mozgatásához kövesse az alábbi lépéseket:
Válassza az Áthelyezés fület, és válassza az Eszköz fület.
Állítsa be a pózt mozgatni az eszközre való hivatkozással.
Érintse meg és tartsa lenyomva az Áthelyezés a megfelelő feladatpózra gombot a beállított koordináták eléréséhez.