
Jog panel
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Válassza ki a panel típusát | Kiválaszthatja az áthelyezés gomb helyét. |
| 2 | 3D szimuláció | Ez a 3D-s megjelenítő, ahol láthatja, hogyan néz ki a robot. |
| 3 | Szimulátor beállítása | Ezt a részt használhatja a szimulátor irányítására. |
| 4 | Használja a növekményt | Ezzel a gombbal engedélyezheti a szög- vagy pozíciónövekményeket. |
| 5 | Szögnövelés | Ebben a szakaszban állítható be a szögnövelés a kiválasztott tengelyen. |
| 6 | Pozíció növekmény | Ebben a szakaszban van beállítva a kiválasztott tengely pozíciónövekménye. |
| 7 | Ütközés | Ez a mező az, ahol a robot ütközését állítja be. |
| 8 | Kényszerített monitorozás | Ebben a részben az X, Y és z tengelyekben az erőket a Base, Tool, World, Reference és egyebek alapján állíthatja be. |
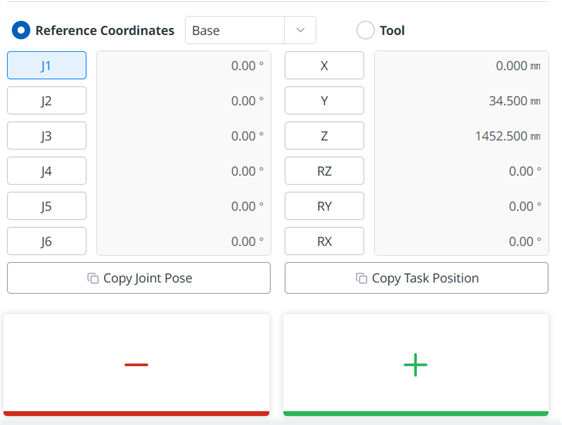
| 9 | Válassza ki a referencia koordináta-rendszert | Válassza ki a 11. Ábrán a feladat koordinátáihoz használandó referenciaszintet. Választhat Base, World vagy User Coordinates. |
| 10 | Közös panel | Kiválaszthatja a léptetőtengelyt. |
| 11 | Feladatpanel | Kiválaszthatja a kocogni kívánt tevékenységtengelyt. |
| 12 | Másolás pózolás J gomb | Ez a gomb lehetővé teszi, hogy másolja a pózt J.. |
| 13 | Másolás Pose X gomb | Ez a gomb lehetővé teszi a Pose X másolását |
| 14 | Move - gomb | A robot minden tengely alapján a - irányban mozoghat. Ebben az időben a bal oldalon a 3D szimuláció - és + irányát is meghatározhatja. |
| 15 | Mozgatás + gomb | A robotot minden tengely alapján + irányban mozgathatja. Ebben az időben a bal oldalon a 3D szimuláció - és + irányát is meghatározhatja. |
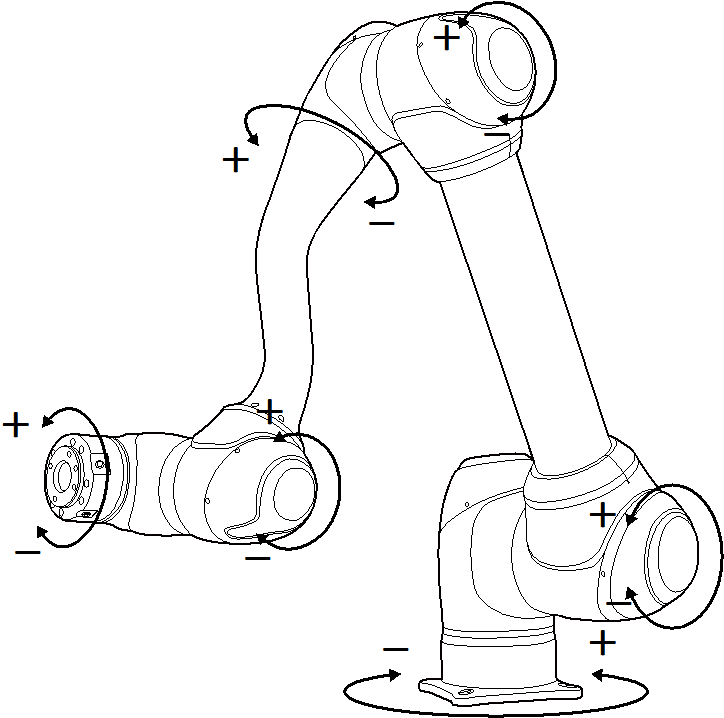
Robot Joint alapján
A szögnek a robotcsukló alapján történő beállításához kövesse az alábbi lépéseket:
Válassza ki a tengelyt (J1-J6) a szögnek a közös panelentörténő beállításához.
Nyomja meg és tartsa lenyomva az iránygombokat (
 ,
,  ) a megfelelő tengely szögének beállításához.
) a megfelelő tengely szögének beállításához.
Robot Base alapján

A robot alapkoordinátái alapján történő mozgatásához kövesse az alábbi lépéseket:
Válassza ki a bázist referenciaméret-rendszerként.
A feladatpanelenválassza ki azt a tengelyt (X~RX), amelyhez a szöget be szeretné állítani.
Nyomja meg és tartsa lenyomva az iránygombot (+,-) a megfelelő tengely mozgatásához.
Világkoordináták alapján történő végrehajtás

Ha a robotot a világkoordináták alapján szeretné mozgatni, kövesse az alábbi lépéseket:
Válassza ki a Világot referenciaként koordináta-rendszerként.
A feladatpanelenválassza ki azt a tengelyt (X~RX), amelyhez a szöget be szeretné állítani.
Nyomja meg és tartsa lenyomva az iránygombot (+,-) a megfelelő tengely mozgatásához.
Robot Tool alapú végrehajtás

A robot eszköz alapján történő mozgatásához kövesse az alábbi lépéseket:
Válassza ki az eszközt referenciaméret-rendszerként.
A feladatpanelenválassza ki azt a tengelyt (X~RX), amelyhez a szöget be szeretné állítani.
Nyomja meg és tartsa lenyomva az iránygombot (+,-) a megfelelő tengely mozgatásához.
Megjegyzés
A biztonsági terület virtuális módban nem érvényes.
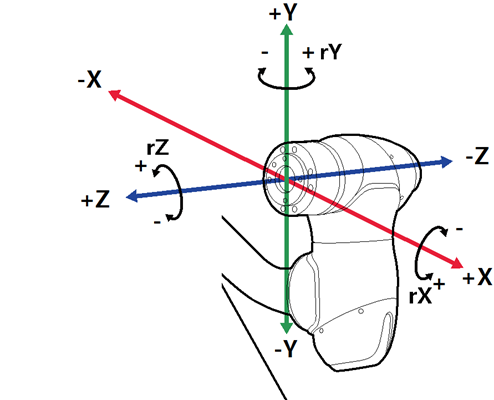
Az Rx, az RY és az Rz a TCP (szerszámközpont helyzete) szerint kerül végrehajtásra.