
Igazítsa a panelt
Menü
Elemek | Leírás | |
|---|---|---|
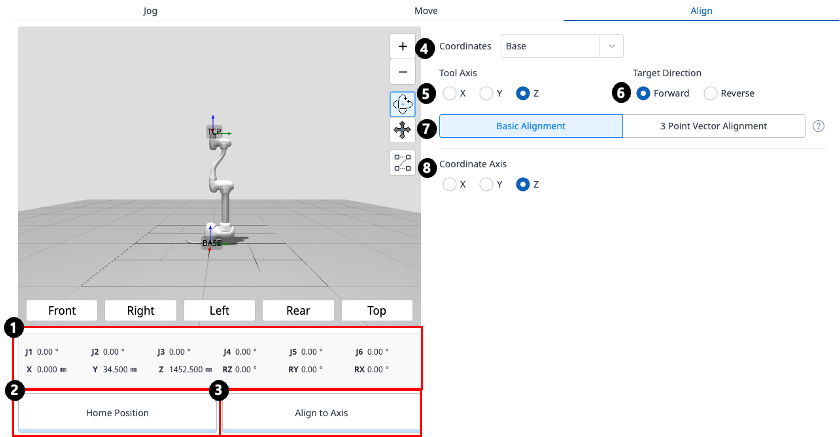
1 | Robot testtartás | Megjeleníti az aktuális robot csuklóhelyzetét és feladatpozícióját. |
2 | Alaphelyzet gomb | A robotot alaphelyzetbe mozgatja, amikor rákattint. |
3 | Igazítás gomb | Rákattintáskor igazítja a robotot. |
4 | Válassza a Reference Coordinate System | Válassza ki a pozicionáláshoz a referencia koordináta-rendszert. |
5 | Szerszámtengely | Válassza ki, hogy a TCP melyik tengelyét kívánja összehangolni. |
6 | Célirány | Válassza ki azt az irányt, amellyel a TCP-t összhangba kívánja hozni. |
7 | Igazítási módszer | Válassza ki az igazítási módszert. |
8 | Koordináta tengely | Válassza ki, hogy a koordináta-rendszer melyik tengelyéhez kíván igazodni. |
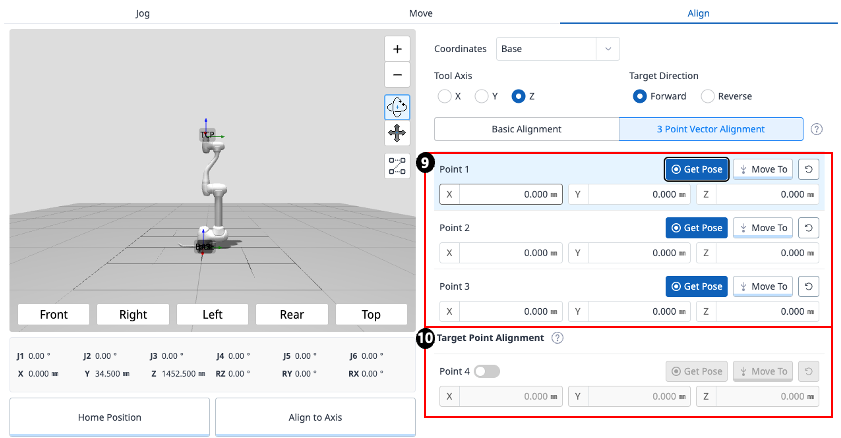
9 | Válassza ki a Points on a Plane | Válasszon ki három pontot, amelyek meghatározzák a síkot. 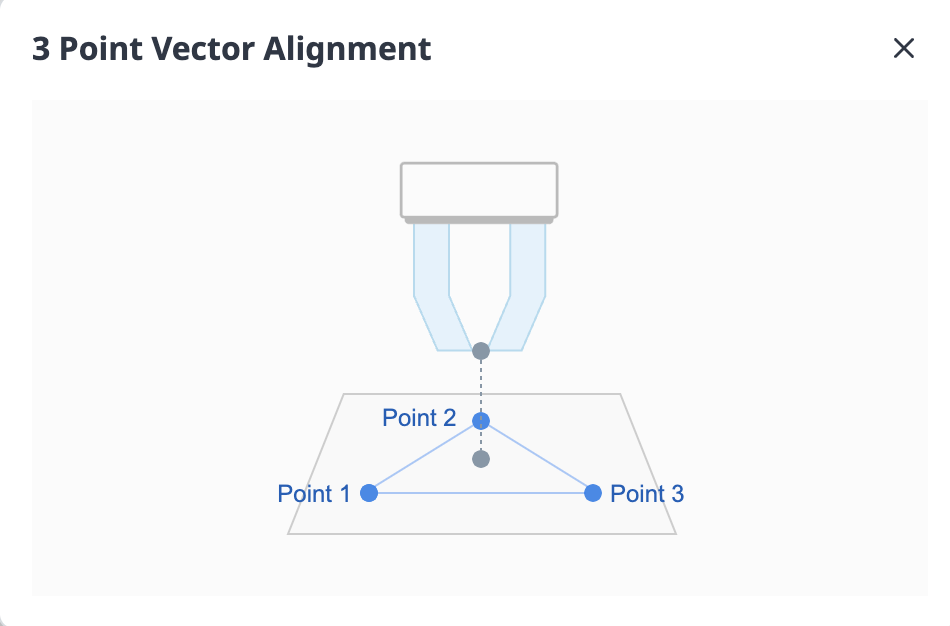 |
10 | Célpont igazítása | Válasszon ki egy pontot a TCP pozicionálásához. |