Térkorlát és zónák beállításai
Gyakori
Az effektív terület választható belső/külső területként.
Az Alakzat típusa Gömb, henger, mandzsetta, döntött mandzsetta vagy többsíkú doboz lehet. További információkért lásd: A hely korlátjának és a zóna beállításainak áttekintése.
Helyhatár beállítása
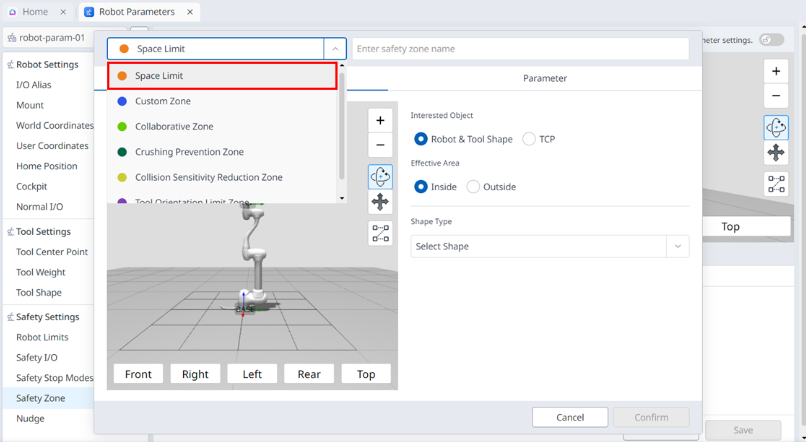
A Space Limit egy olyan funkció, amely virtuális kerítést állít be a robot legkülső területén. A robotot a helykorlát beállítása nélkül is működtetheti, de a biztonságos használat érdekében javasolt helykorlátozást beállítani.
A beállítást a Robot Parameters > Safety Zone > Add > az előugró ablak bal felső sarkában található „Space Limit” (Térkorlát) kiválasztásával állíthatja be.
Kiválaszthatja a Robot & Tool Shape/TCP (Robot & Tool alakzat/TCP) egyikét az érdeklődő objektumhoz.
A robotnak a normál beállításra beállított térkorláton belül kell lennie.
Megjegyzés
A beállítástól függően a Space Expansion alapértelmezett értéke létezik.
Szerszám alakjának beállítása, amikor kiválasztja a 'TCP'-t az ellenőrzéshez, a TCP margó értéke 0 mm
Szerszám alakjának beállítása, amikor kiválasztja a „Robot & Tool Shape” (Robot & Tool Shape) lehetőséget az ellenőrzéshez, a TCP margin értéke 0 mm
Az eszköz alakzata nincs beállítva, amikor a 'TCP' lehetőséget választja ellenőrzésre, a TCP margó értéke 0 mm
A szerszám alakzata nincs beállítva, amikor kiválasztja a „Robot & Tool Shape” (Robot & Tool Shape) lehetőséget az ellenőrzéshez, a TCP margin értéke 60 mm
Az egyéni zóna beállítása
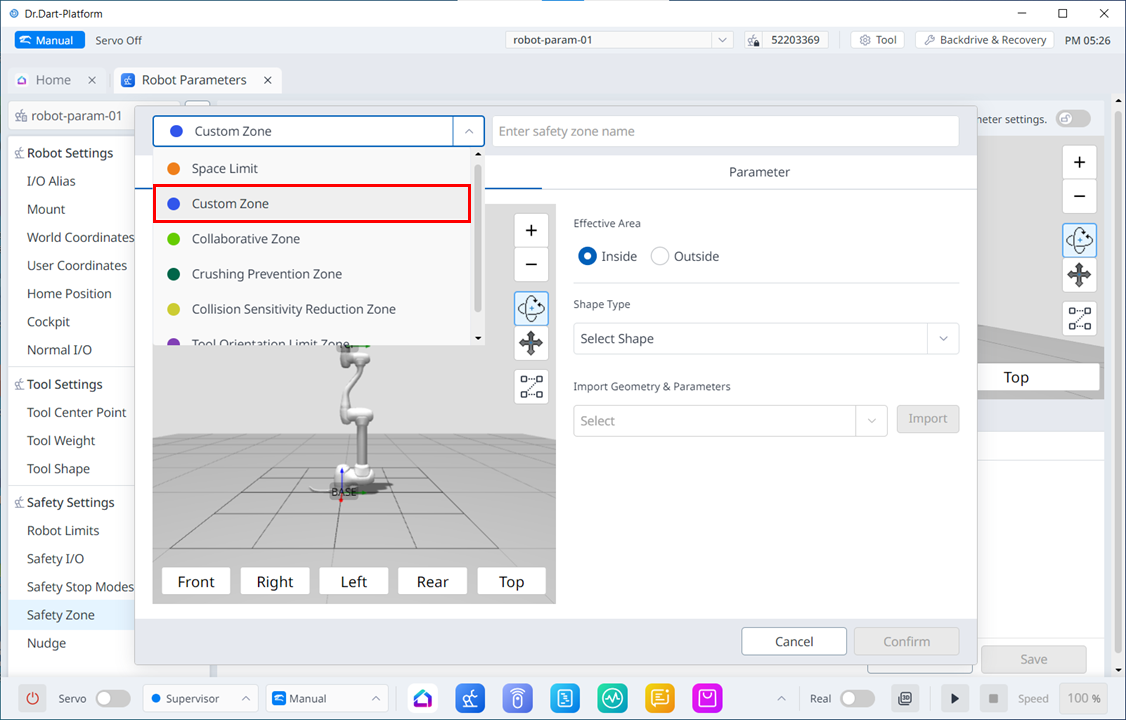
A Custom Zone a legrugalmasabb biztonsági zóna, ahol szabadon beállíthatja a biztonsági paramétereket. Az összes beállítást, például a robotkorlátokat, a biztonságos leállítás üzemmódot, a közös sebességet és a szöghatárokat az Ön igényeinek megfelelően konfigurálhatja.
Beállíthatja az „Egyéni zóna” lehetőséget a Robot Parameters > Safety Zone > Add > pop-up bal felső részén.
Megjegyzés
Ha a TCP olyan helyzetben van, ahol több terület átfedi egymást, az alábbi szabályok minden egyes biztonsági funkcióra külön-külön érvényesek.
Normál üzemmód
Ha egyetlen zóna sem van magas prioritású zónára állítva, az átfedő zónák legkorlátozottabb biztonsági határértéke az ellenőrzés referenciaértéke.
Ha egy zóna magas prioritású zónaként van beállítva, akkor az adott zóna határértéke az ellenőrzés referenciaértéke.
Ha több mint két zóna van beállítva magas prioritású zónaként, akkor a zónák legnyugodtabb biztonsági határértéke az ellenőrzési kritériumok.
Csökkentési mód
Ha egyetlen zóna sem van magas prioritású zónára állítva, az átfedő zónák legkorlátozottabb biztonsági határértéke az ellenőrzés referenciaértéke.
Ha egy zóna magas prioritású zónára van beállítva, akkor az adott zóna felülbírálása opció határozza meg az ellenőrzés referenciaértékét.
Ha a felülbírálási opció nincs bejelölve, a legmagasabb prioritású zóna és a globális csökkentett határérték közötti legkorlátozottabb biztonsági határérték az ellenőrzés referenciaértéke lesz.
Ha a felülbírálási opció be van jelölve, a magas prioritású zóna az ellenőrzés referenciaértéke.
Ha egynél több zóna van beállítva magas prioritású zónára, akkor az adott zóna felülbírálása opció határozza meg az ellenőrzés referenciaértékét.
Ha a felülbírálási opció nincs bejelölve a magas prioritású zónák egyikénél sem , akkor a legmagasabb prioritású zóna, ahol a felülbírálási opció nincs bejelölve, és a Globális csökkentett határérték legkorlátozottabb biztonsági határértéke az ellenőrzés referenciaértéke lesz.
Ha az összes magas prioritású zóna felülbírálási opcióját bejelölik, a legmagasabb prioritású zónák közül a legnyugodtabb biztonsági határérték az ellenőrzési kritériumok.
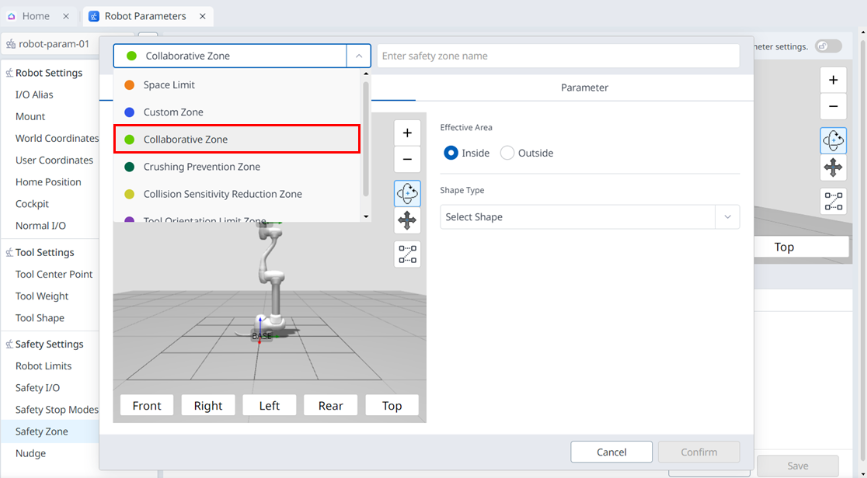
Az együttműködési zóna beállítása
Az együttműködési zóna egy olyan zóna, amelyet úgy terveztek, hogy biztonságosan működjön a robotokkal. Ez biztosítja a robot korlátait, például a közeli munkavégzéshez szükséges lassítási sebességet és a biztonságos leállítási mód beállításait.
Beállíthatja úgy, hogy kiválasztja az „Együttműködő zóna” lehetőséget a Robot Parameters > Safety Zone > Add > popup bal felső részén.
A Zúzódás-megelőzési zóna beállítása
A Zúzásmegelőzési zóna egy olyan zóna, amely megakadályozza a robot és más tárgyak közötti zúzódásokat. Ebben a zónában, amikor az ütközés és a külső erő határértéke megsérül, a biztonsági stop mód RS1-re (Reflex Stop) van rögzítve, és az ütközési érzékenység 100%-ra van állítva, így ütközés észlelésekor a robot a lehető legérzékenyebben reagál a külső erőre, majd biztonságosan megáll a lebegő reakcióval.
Beállíthatja úgy, hogy a Robot Parameters > Safety Zone > Add > popup bal felső részén a „Zúzás-megelőzési zóna” lehetőséget választja.
Az ütközési érzékenység csökkentési zónájának beállítása
Az ütközésérzékenység-csökkentési zóna egy olyan zóna, amely különböző anyagokkal vagy felületekkel végzett munka esetén módosítja a robot ütközésérzékelő érzékenységét. Erő- és ütközésérzékenységi beállításokat biztosít.
Beállíthatja úgy, hogy kiválasztja az „Ütközésérzékenység-csökkentési zóna” lehetőséget a Robot Parameters > Safety Zone > Add > Top Left (Robot paraméterek > Biztonsági zóna > Hozzáadás > Felugró ablak bal felső része) menüpontban.
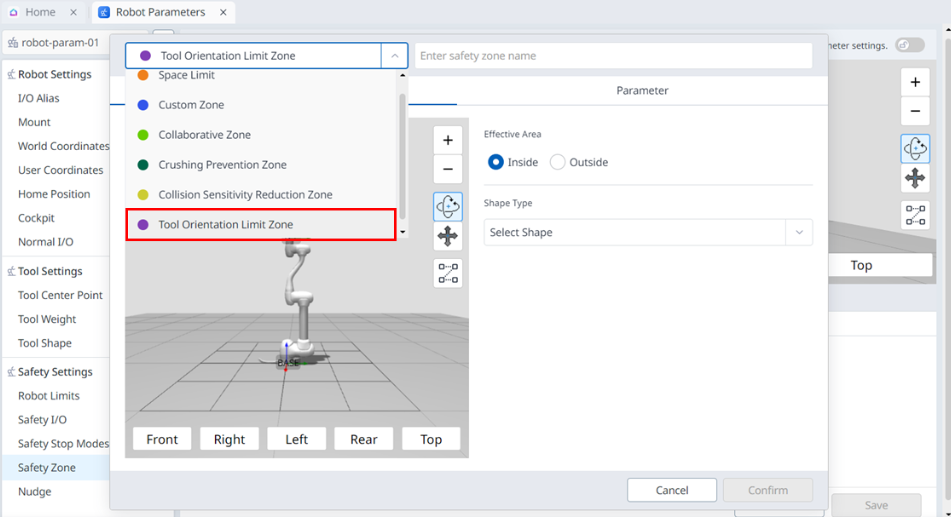
Az eszköz orientációs határterületének beállítása
Az Eszközorientációs határzóna a TCP orientációját korlátozó zóna. Biztosítja, hogy a TCP egy adott irányba nézzen, és megakadályozza, hogy egy nem biztonságos irányba nézzen az irány és a szög margójának meghatározásával.
Beállíthatja úgy, hogy a „Tool Orientation Limit Zone” (Eszközorientációs határzóna) lehetőséget választja a Robot Parameters (Robot paraméterek) > Safe Zone (Biztonságos zóna) > Add (Hozzáadás) > Top Left (bal felső)