A robot korlátai és biztonsága
A robot korlátozza a beállítást
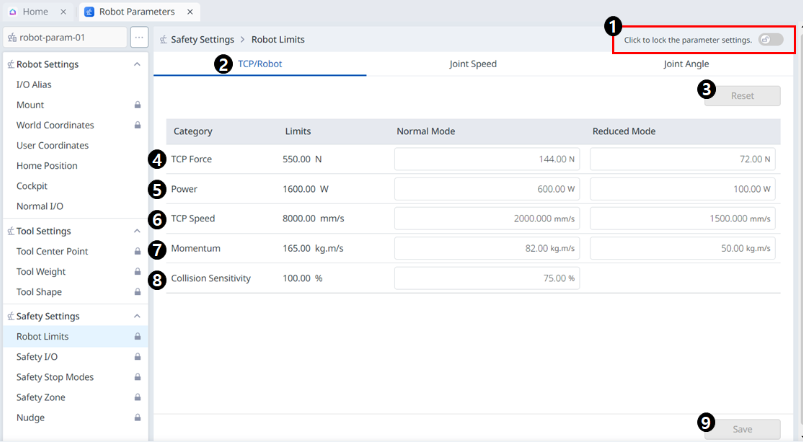
A Robot Limits-ben a robothoz kapcsolódó különböző korlátok állíthatók be. Ezek a határértékek biztosítják, hogy a robot biztonságosan működjön a beállított határértékeken belül.
A robot határértékei a Robot Paraméter > Biztonsági beállítások > Robot Limits menüpontban állíthatókbe.
Az egyes határértékek részletes leírását lásd a Robot Limits című részben.
A robotok korlátai nagyrészt 3 kategóriára oszlanak. Minden kategória a következő képernyőket és funkciókat tartalmazza.
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | TCP/robot | A robot határainak nagy osztályozása. |
| 3 | Visszaállítás | A beállítások visszaállítására szolgál. |
| 4 | Erő | Az erő beállításához használják. |
| 5 | Tápellátás | A hatalom beállításához használják. |
| 6 | Sebesség | A sebesség beállítására szolgál. |
| 7 | Momentum | A lendület megteremtésére használják. |
| 8 | Ütközés | Az ütközés beállításához használatos. |
| 9 | Mentés | A vonatkozó beállítás mentésére szolgál. |
Menü
Elemek | Leírás | |
|---|---|---|
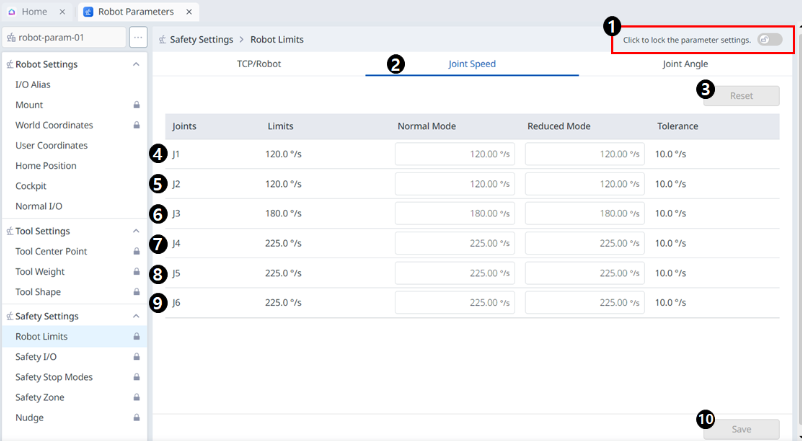
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | Csatlakozási sebesség | A robot határainak nagy osztályozása. |
| 3 | Visszaállítás | A beállítások visszaállítására szolgál. |
| 4 | J1 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 5 | J2 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 6 | J3 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 7 | J4 (a P sorozatú típusok esetében inaktív) | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 8 | J5 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 9 | J6 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 10 | Mentés | A vonatkozó beállítás mentésére szolgál. |
Menü
Elemek | Leírás | |
|---|---|---|
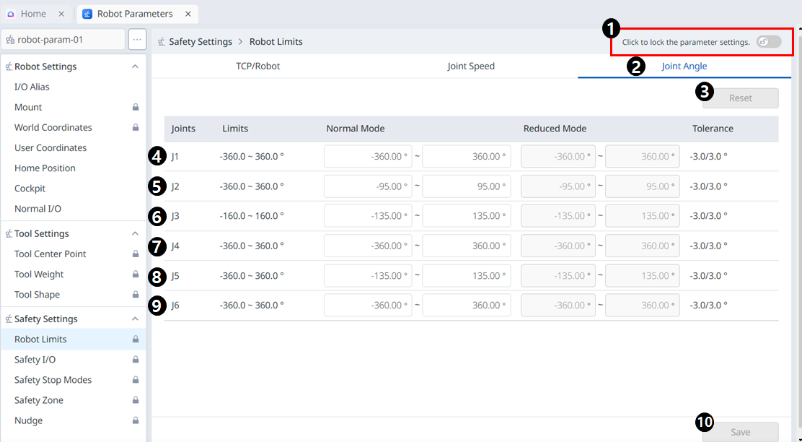
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | Csukló szöge | A robot határainak nagy osztályozása. |
| 3 | Visszaállítás | A beállítások visszaállítására szolgál. |
| 4 | J1 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 5 | J2 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 6 | J3 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 7 | J4 (a P sorozatú típusok esetében inaktív) | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 8 | J5 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 9 | J6 | A normál és csökkentett üzemmód beállításainak megadására szolgál. |
| 10 | Mentés | A vonatkozó beállítás mentésére szolgál. |
Biztonsági I/O
Ez a funkció a redundáns csatlakozókhoz érkező, biztonsággal kapcsolatos jelek bevitelére/kibocsátására szolgál. Ha a rendszer a biztonsági bemeneti/kimeneti jelek bármelyikét eltérő redundáns jelnek érzékeli, akkor az áramköri szakadást vagy hardverhibát állapít meg, és STO stop módban leállítja a robotot.
A biztonsági I/O beállításához válassza a Robot Parameters > Safety Settings > Safety I/O lehetőséget.
További információkért tekintse meg a Biztonsági jel I/O című részt.
Bemenet
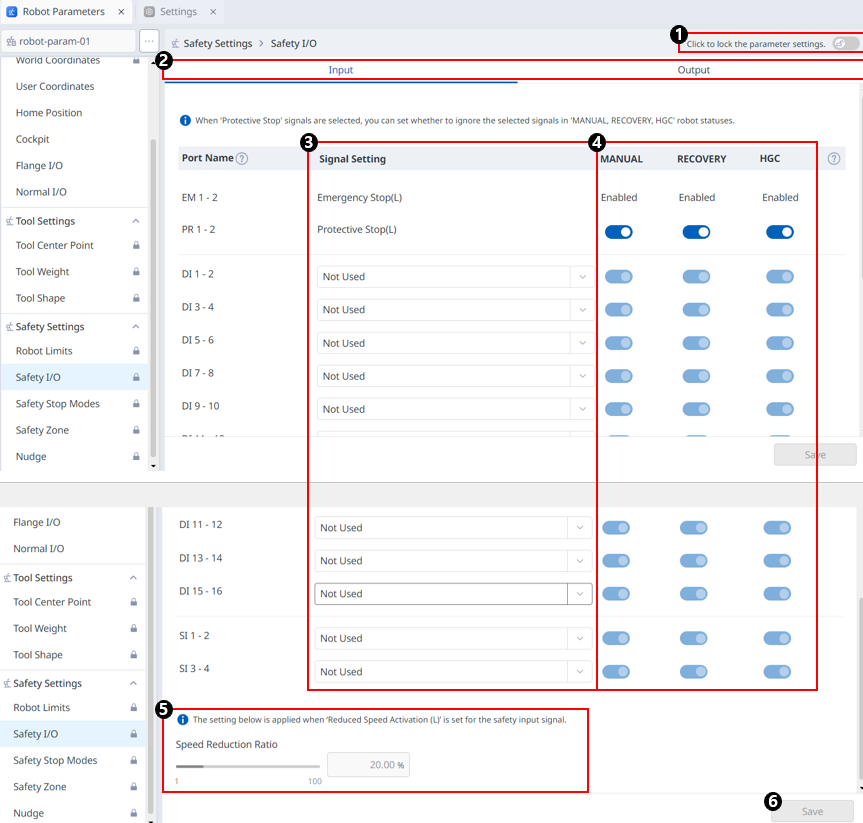
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | Bemenet/kimenet | Beállítható a bemenet/kimenet. |
| 3 | Jelbeállítás | Az egyes portokhoz beállított opciók. Nem használt |
| 4 | Válassza ki, hogy figyelmen kívül kívánja-e hagyni a jelet a robot állapotától függően | Ha a „Protective Stop” (Védő leállítás) jelet választja, beállíthatja, hogy figyelmen kívül hagyja-e a kiválasztott jelet a „MANUAL, RECOVERY, HGC” (MANUÁLIS, HELYREÁLLÍTÁS, HGC) robotállapotban. |
| 5 | Állítsa be a lassítási sebességet | Beállíthatja a lassítási sebességet. 0 és 100 között lehet. |
| 6 | Mentés | Ezzel a gombbal mentheti a megadott beállítást. |
Kimenet
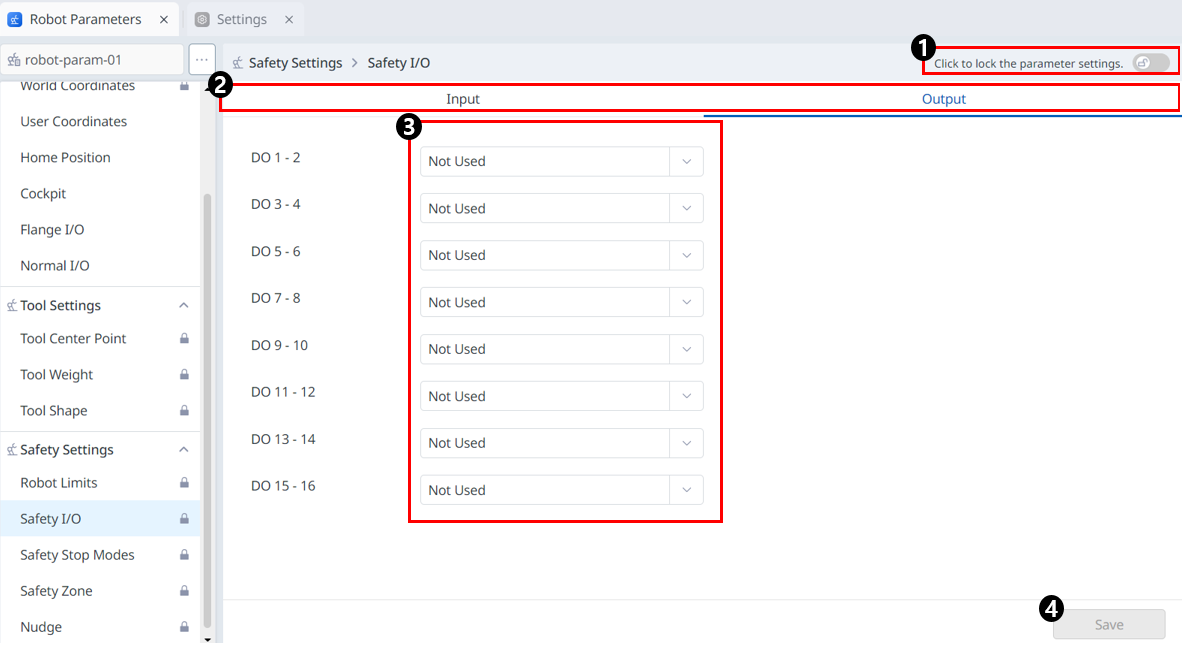
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | Bemenet/kimenet | Beállítható a bemenet/kimenet. |
| 3 | Jelbeállítás | Az egyes portokhoz beállított opciók. Nem használt |
| 4 | Mentés | Ezzel a gombbal mentheti a megadott beállítást. |
Biztonsági leállítási módok beállításai
Ismerje meg a biztonsági ütközők típusait és a biztonsági ütköző be- és kikapcsolásának módját.
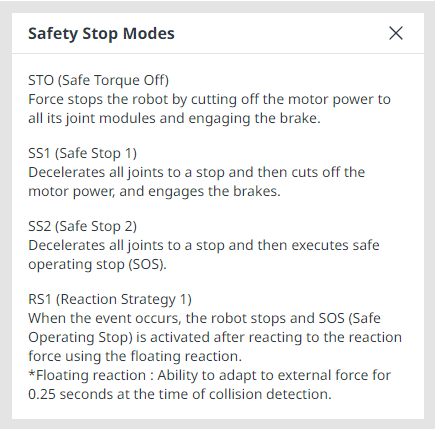
A biztonsági leállások típusai
A felhasználói biztonságot biztosító leállási üzemmódok a következők:
STO (biztonságos nyomaték kikapcsolva): Leállítja a szervo kikapcsolását (a motor azonnal kikapcsol)
SS1 (Safe Stop 1): Szervo kikapcsolva a maximális lassítási leállítás után
SS2 (Safe Stop 2): Készenléti állapotban a maximális lassítási leállítás után (szünet)
RS1: Ütközéskor megfelel az ütközéssel ellentétes iránynak, majd készenléti üzemmódba lép (csak Ütközésérzékelés/TCP erőkorlát megsértése esetén állítható be)
A Doosan Robotics robotok kétféle biztonsági leállítási funkcióval rendelkeznek. A vészleállító általános vészhelyzetekre szolgál, és a robot a vészleállító kioldása után folytathatja működését a Szervo On funkcióval. Védő leállítás esetén a robot a védelmi leállítás okának feloldásával és a leállítás feloldásával folytathatja a működést.
Vészleállító: Beállítja a leállítási módot, amikor a Teach (Tanítás) függeszték vészleállító gombja vagy egy kiegészítő telepített külső eszköz aktiválva van
Akkor aktiválódik, ha megnyomja a Teach (Tanítás) függeszték vészleállító kapcsolóját vagy a TBSFT EM csatlakozóhoz csatlakoztatott kapcsolót.
Csak STO vagy SS1 választható.
Védő leállítás: Beállítja a leállítás üzemmódot, amikor a külsőleg csatlakoztatott védőberendezés aktiválva van
Akkor aktiválódik, ha a TBSFT PR csatlakozóhoz csatlakoztatott védőberendezés aktiválva van.
A biztonsági leállítási funkciókkal kapcsolatos további információkért tekintse meg a Biztonsági funkciókcímű részt.
A biztonsági leállítás be-/kikapcsolása
A vészleállító aktiválásához nyomja meg a tanítási függeszték vészleállító gombját, vagy aktiválja a biztonsági I/O-hoz csatlakoztatott biztonsági eszközt. A biztonsági eszközök a „ Teach” (Tanítás) függőképernyő „Vészleállító” vagy „Protective Stop” (Védő leállító) funkcióihoz kapcsolhatók a „Robot Parameters” (Robot paraméterek) > „Safety Settings” (Biztonsági beállítások)
A biztonsági eszköz biztonsági I/O-hoz történő csatlakoztatásával kapcsolatos további információkért tekintse meg a Connect Controller I/Ocímű részt.
A biztonsági leállítás funkció beállításával kapcsolatos információkért lásd a biztonsági jel I/O című részt.
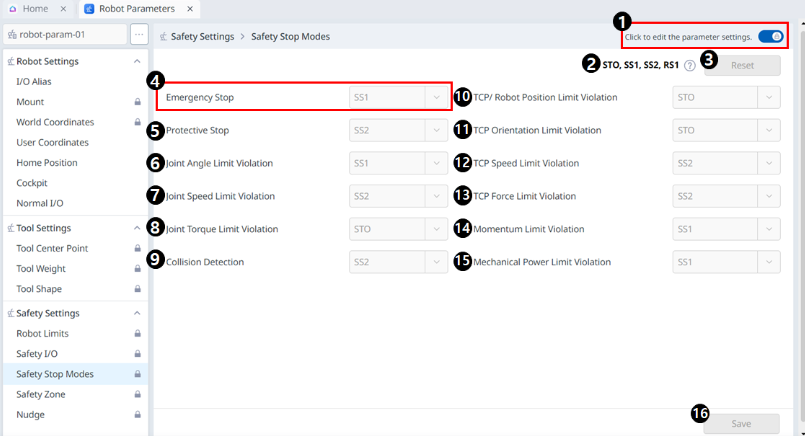
Menü
Elemek | Leírás | |
|---|---|---|
| 1 | Zárolás billenőgombja | A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
| 2 | Információs üzenet | A beállításhoz szükséges információkat tartalmazó üzenet. |
| 3 | Visszaállítás | Egy gomb a beállítások visszaállításához. |
| 4 | Vészleállító | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO SS1 |
| 5 | Védő leállítás | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: SS1 SS2 |
| 6 | A csukló szöghatárának megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO SS1 SS2 |
| 7 | Közös sebességkorlátozás megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 8 | A csukló nyomatékhatárának megsértése | Csak STO áll rendelkezésre. |
| 9 | Ütközésérzékelés | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 RS1 |
| 10 | TCP Robot pozíció limit megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO SS1 SS2 |
| 11 | TCP orientációs korlát megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 12 | TCP sebességkorlátozás megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menü a következőket tartalmazza: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 13 | TCP erőkorlát megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 14 | Momentum limit megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 15 | Mechanikai határérték megsértése | A megfelelő tételhez biztonsági ütközőt lehet kiválasztani. A legördülő menük a következőket tartalmazzák: STO (kivéve a H/P sorozatot) SS1 SS2 |
| 16 | Mentés | Ezzel a gombbal mentheti a beállítási értékeket. |
Megjegyzés
Az információs üzenetben a következő felugró ablak jelenik meg:
Megjegyzés
A 3,2.2-es verziótól kezdve a H típus Safety Stop módjainak egyes STO-beállításai SS1-re módosultak.
Ha a használatban lévő értékeket frissítették, a következő felugró ablak jelenik meg.