Külső eszközök csatlakoztatása
Külső eszközök csatlakoztatása - Vision Sensor
A robot csatlakoztatható egy látóérzékelővel (2D kamera az objektumpozíció méréséhez), és a képérzékelő mérései hálózaton keresztül átvihetők a robotra, hogy összekapcsolják a robot parancsait.
Vision Sensor beállítás
Kommunikációs kapcsolat beállítása
Csatlakoztassa az eszközök LAN-portjait, és alkalmazza a TCP/IP kommunikációt a képérzékelő méréseinek a robotra történő átviteléhez. (Lásd: Hálózati kapcsolat) a TCP/IP kommunikáció engedélyezéséhez állítsa a látóérzékelő IP-címét TCP/IP 192.168.137.xxx sávra.
Látásbeli munka beállítása
Az objektum pozíciójának méréséhez a céltárgy képbemenetére és látására vonatkozó oktatásra van szükség a látóérzékelő használatával. Tekintse meg a látásérzékelő gyártója által biztosított, erre a célra szolgáló munkabeállítási programot.
Mérési adatformátum beállítása
A látásérzékelő mérési adatainak robotmunka során történő felhasználásához el kell végezni a látásérzékelő-robot koordináták kalibrálását, és ezt a munka megkezdése előtt el kell végezni a látásérzékelő-beállító program használatával. A látásérzékelő mérési adatait a következő formátumbeállítások segítségével kell továbbítani:
Formátum | pos | , | x | , | y | , | szög | , | var1 | , | var2 | , | … |
|---|
pos: A mérési adatok kezdetét jelző szeparátor (előtag)
x: X a tárgy koordináta-értéke a látásérzékelővel mérve
y: Y a látóérzékelő segítségével mért objektum koordináta-értéke
szög: A tárgy forgási szögének értéke a látóérzékelővel mérve
Var1 … Varn: Látásérzékelővel mért adatok (pl. tárgyméret/hiba-ellenőrzési érték) POS,254,5,-38,1,45,3,1,50.1 (leírás: X=254,5, y=-38,1, szög=145,3, var1=1, var2=50,1)
Robotprogram beállítása
Amikor a látásérzékelő és a robot és a látásérzékelő közötti fizikai kommunikációs kapcsolat befejeződött, be kell állítani egy programot, amely lehetővé teszi a látásérzékelő és a robotprogram összekapcsolását. A külső képérzékelő funkciói a Doosan Robot Language (DRL) segítségével csatlakoztathatók/kommunikálhatók/vezérelhetők, és a program a Task Writer programban is beállítható.
A Doosan Robot Language (DRL) külső képérzékelő funkciókra vonatkozó részletes és átfogó példáit a Programozási kézikönyv tartalmazza.
Külső eszköz csatlakoztatása – DART platform
A DART Platform egy olyan szoftver, amely Windows operációs rendszer alapú asztalon vagy laptopon fut. Miután a vezérlőt és az asztali számítógépet/laptopot csatlakoztatta a LAN porton keresztül, a Teach függönnyel kapcsolatos összes funkció a DART Platform végrehajtásától kezdve elérhető. Ekkor a következő beállítási eljárás szükséges a vezérlőn belüli alvezérlőkhöz való csatlakozáshoz.
IP-cím keresése és kapcsolat beállítása
Kommunikációs kapcsolat beállítása
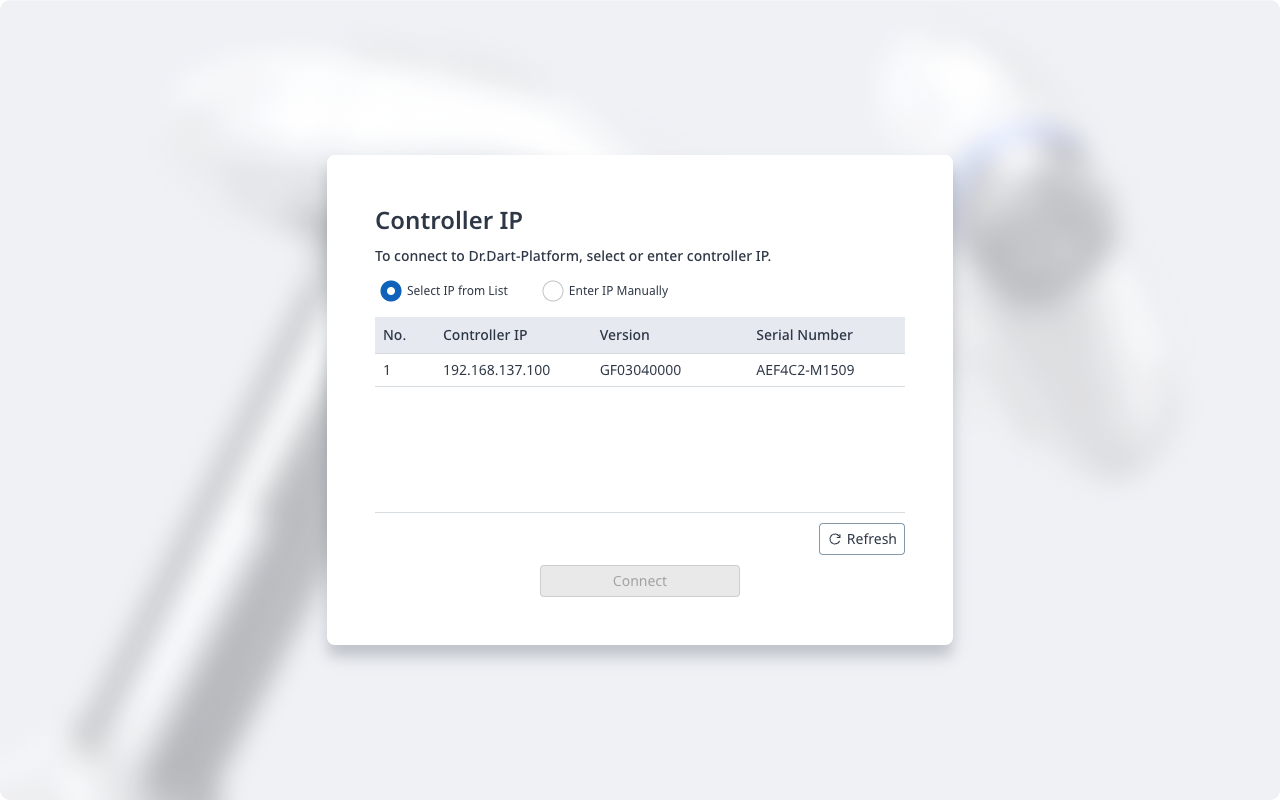
Amikor a DART Platform a laptop és a vezérlő LAN portjának csatlakoztatása után kerül végrehajtásra, a vezérlő IP-címe, az alvezérlő verzióadatai és a kapcsolat létrehozásához szükséges robot sorozatszáma automatikusan átkutatásra kerül.
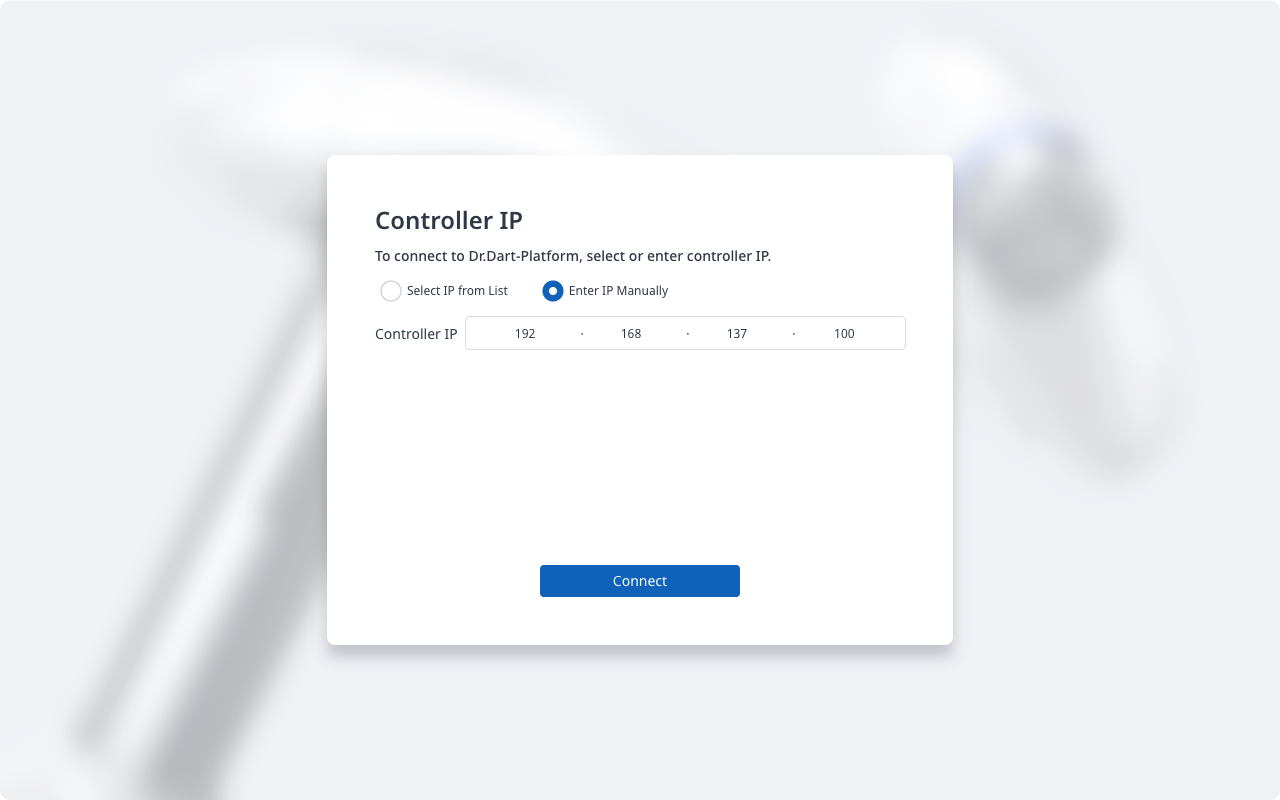
Ha a keresés nem sikerül, a frissítés gomb megnyomásával frissítheti, vagy az IP-cím manuális megadásához érintse meg az IP-cím megadása gombot.
A csatlakoztatni kívánt robot sorozatszámának kiválasztása és a Connect gomb megnyomása kapcsolatot teremt a DART platform és az alvezérlő között, és lehetővé teszi a robot megfelelő működését.
Ha probléma van a csatlakozással, próbálkozzon az alábbi eljárással, de ha ez a probléma továbbra is fennáll, forduljon segítségért az értékesítési vagy szervizszemélyzethez.
Ha a csatlakoztatható vezérlő IP-címe, az alvezérlő verzióadatai és a robot sorozatszáma nem jelenik meg a keresési eredmények között: Nyomja meg a Refresh (Frissítés) gombot az ismételt kereséshez, majd próbálja meg újra csatlakoztatni a fenti eljárás szerint.
Ezután, ha a Transfer Control oldalt az alábbiak szerint látja, érintse meg a Kényszerített visszavonás gombot a platformhoz való csatlakozáshoz.