
Module de commande à distance
Le module Remote Control permet d'exécuter le contrôle à distance des tâches que vous avez déjà créées.
Ce module peut être exécuté au niveau administrateur.
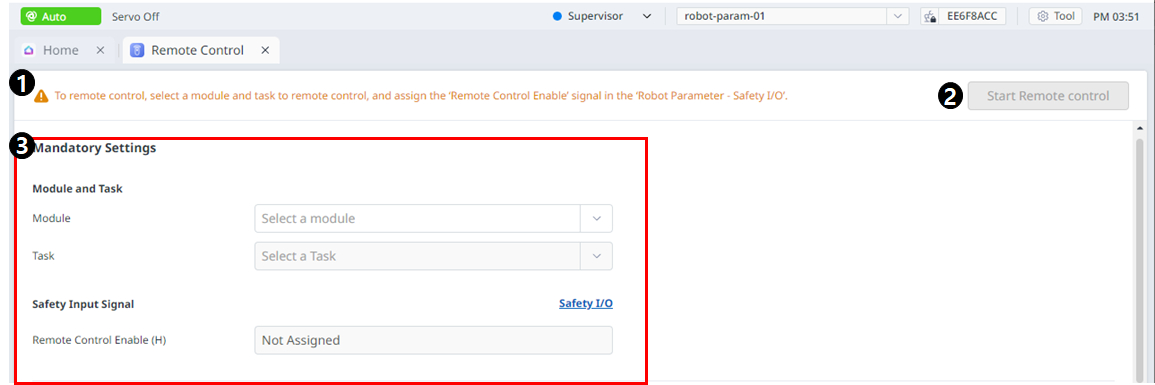

Disposition des menus
| Item | Description | |
|---|---|---|
| 1 | Warning | Ceci montrera les précautions nécessaires lors de l'utilisation du module. |
| 2 | Start Remote Control | Ce bouton vous permet de démarrer la télécommande une fois tous les réglages terminés. |
| 3 | Mandatory Settings | Il s'agit d'un paramètre obligatoire pour la télécommande. Vous pouvez définir des modules et des tâches et définir des signaux d'entrée sûrs. |
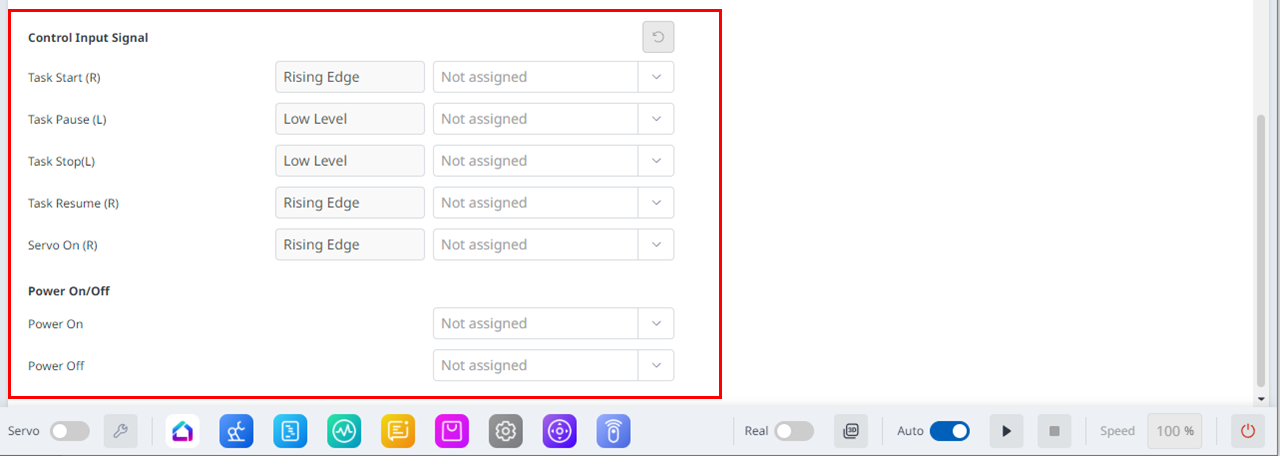
| 4 | Advanced Settings | Cela permet de définir des paramètres avancés pour le contrôle à distance. Vous pouvez configurer chaque port pour la tâche pour démarrer/mettre en pause/arrêter/reprendre/servo on. Si le contrôle à distance est configuré pour s'exécuter automatiquement après le redémarrage, il s'exécutera dès que Dart-Platform redémarrera. |
Vous pouvez accéder à l’écran du mode de contrôle à distance lorsque vous démarrez le contrôle à distance.
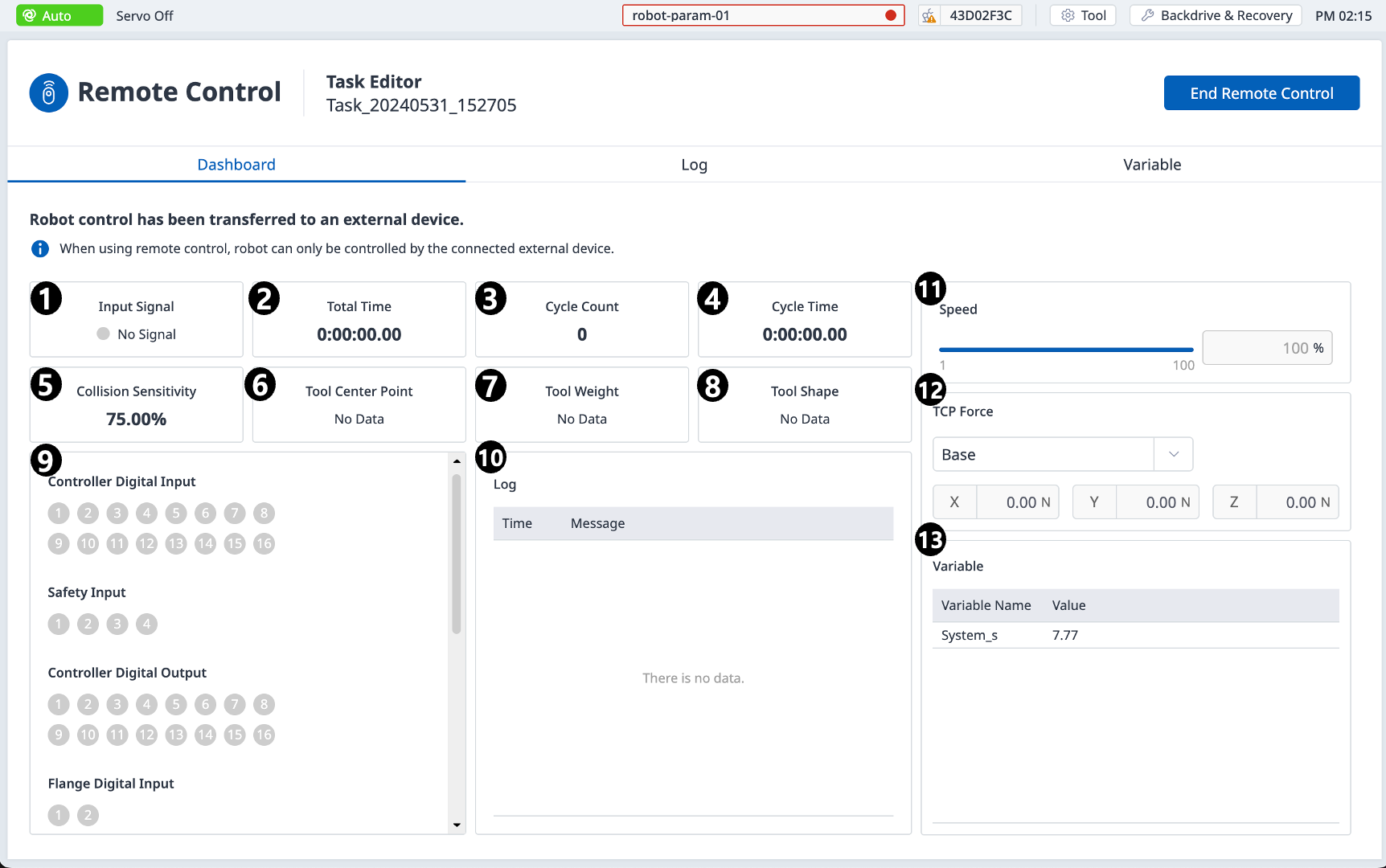
Dashboard
| Item | Description | |
|---|---|---|
| 1 | Input Signal | Parmi les éléments de signal d'entrée de sécurité définis dans l'entrée/sortie sécurisée, un signal d'activation de télécommande est reçu et affiché. |
| 2 | Total Time | Affiche l'heure à laquelle la tâche a été exécutée. |
| 3 | Cycle Count | Affiche le nombre de répétitions de la tâche. |
| 4 | Cycle Time | Affiche la durée d'un cycle de la tâche. |
| 5 | Collision Sensitivity | Affiche la valeur de sensibilité aux collisions. Si à l’intérieur de la zone, affiche la valeur de sensibilité aux impacts définie dans cette zone. En dehors de la zone, affiche la valeur de sensibilité aux collisions définie dans la limite du robot. |
| 6 | Tool Center Point | Affiche le point central de l'outil spécifié dans la tâche. |
| 7 | Tool Weight | Affiche le poids de l'outil spécifié dans la tâche. |
| 8 | Tool Shape | Affiche la forme de l'outil spécifiée dans la tâche. |
| 9 | Signal Input/Output | Affiche les valeurs d'entrée/sortie du signal respectives. |
| 10 | Log | Affiche les informations du journal système. |
| 11 | Speed | Vous pouvez définir la vitesse de la tâche. |
| 12 | TCP Force | Affiche la force appliquée au TCP en temps réel. |
| 13 | Variable | Affiche les valeurs des variables utilisées par la tâche en cours d'exécution. |
| Item | Description | |
|---|---|---|
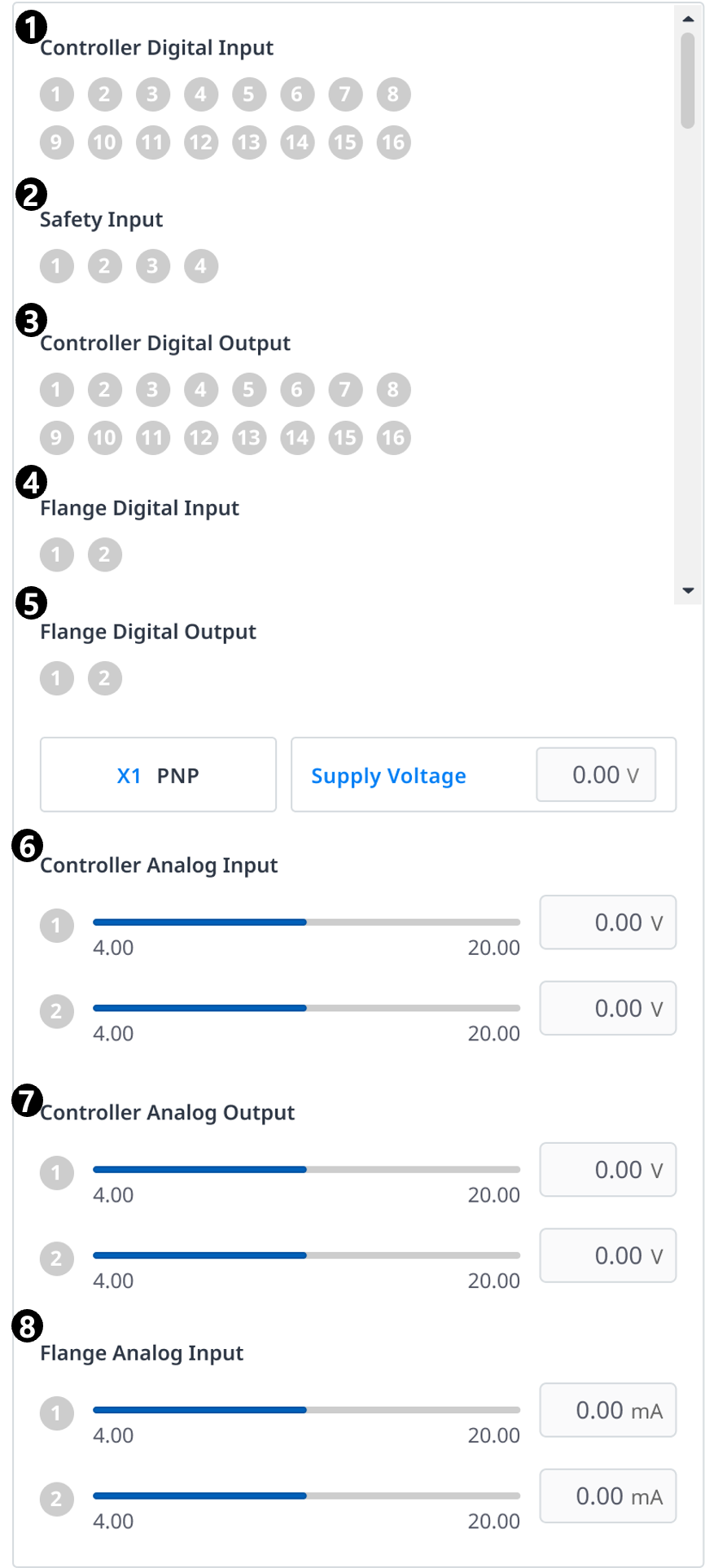
| 1 | Controller Digital Input | Affiche les paramètres d’entrée numérique du contrôleur. |
| 2 | Safety Input | Affiche les paramètres d’entrée de sécurité du contrôleur. |
| 3 | Controller Digital Output | Affiche les paramètres de sortie numérique du contrôleur. |
| 4 | Flange Digital Input | Affiche les paramètres d'entrée numérique de la bride. |
| 5 | Flange Digital Output | Affiche les paramètres de sortie numérique de la bride. |
| 6 | Controller Analog Input | Affiche les paramètres d’entrée analogique du contrôleur. |
| 7 | Controller Analog Output | Affiche les paramètres de sortie analogique du contrôleur. |
| 8 | Flange Analog Input | Affiche les paramètres d'entrée analogique de la bride |
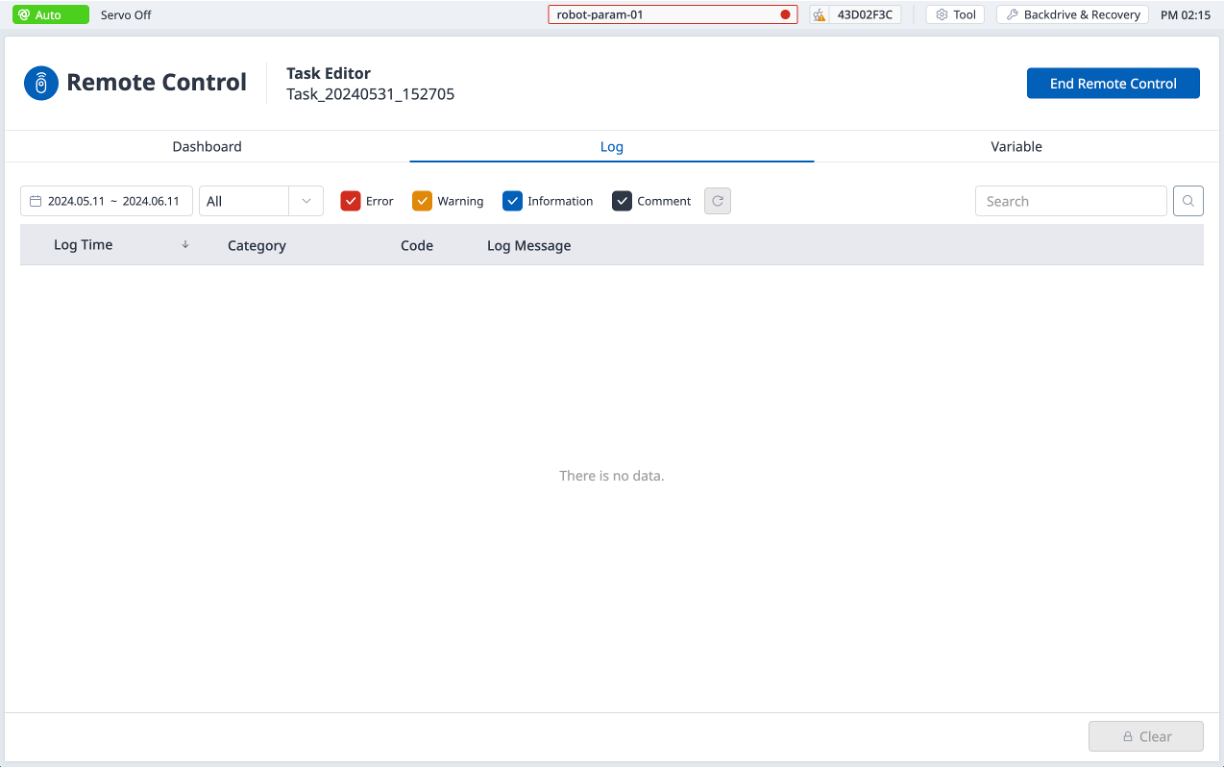
Enregistrer
Affiche les informations du journal système.
Variable
Affiche les valeurs des variables utilisées par la tâche en cours d'exécution.
