
E/S à bride
Le couvercle de la bride d'extrémité du robot présente deux connecteurs de spécification M8 à 8 broches ; la figure ci-dessous indique son emplacement et sa forme.
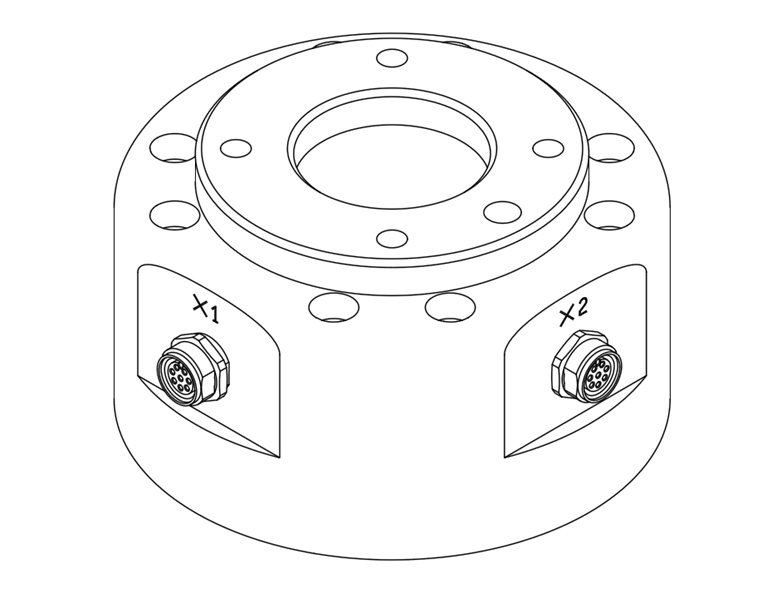
Le connecteur fournit l'alimentation et les signaux de contrôle nécessaires au fonctionnement de la pince de préhension ou des capteurs intégrés dans les outils spécifiques du robot. Les câbles suivants sont des exemples de câbles industriels (des câbles équivalents peuvent être utilisés) :
- Phoenix contact 1404178 (droit)
- Phoenix contact 1404182 (angle droit)
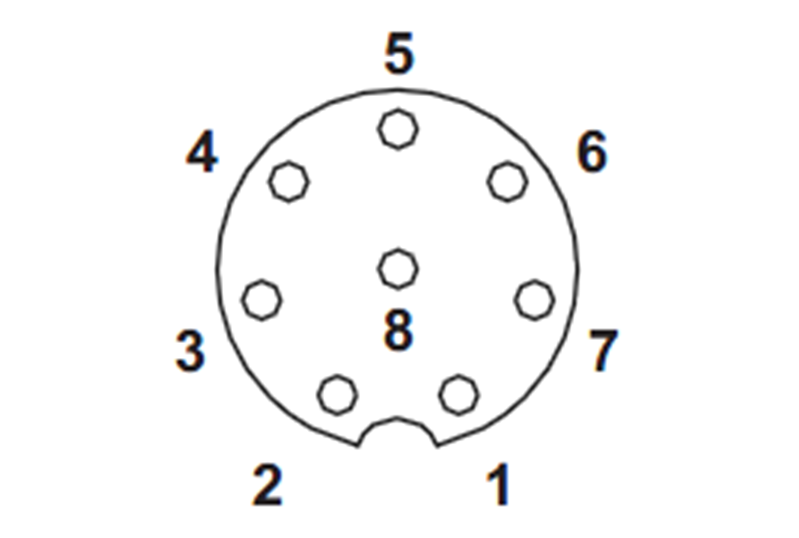
Le schéma des broches pour chaque connecteur est le suivant :
Diagramme schématique
Les fonctions E/S fournies par les connecteurs X1 et X2 sont différentes l'une de l'autre ; le tableau ci-dessous indique les paramètres d'E/S détaillés.
Paramètre X1 (E/S numérique)
N° | Signal |
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Digital Output 3 |
5 | +24 V |
6 | Digital Input 3 |
7 | Digital Input 2 |
8 | GND |
Paramètre X2 (E/S numérique)
N° | Signal |
1 | Digital Input 4 |
2 | Digital Output 4 |
3 | Digital Output 5 |
4 | Digital Output 6 |
5 | +24 V |
6 | Digital Input 6 |
7 | Digital Input 5 |
8 | GND |
L'alimentation interne de l'E/S à bride est réglée sur 24 V. Veuillez consulter le tableau ci-dessous pour obtenir des spécifications détaillées pour la connexion E/S.
Paramètre | Min | Type | Max | Unité |
Tension d'alimentation | - | 24 | - | V |
Courant d'alimentation | - | - | 3 | A |
Sortie numérique | - | 6 | - | EA |
Entrée numérique | - | 6 | - | EA |
Le réglage a été chargé comme suit depuis le 11 avril 2024
Paramètre X1
No | Signal |
|---|---|
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Analog Input 1 / RS-485 + |
5 | +24V / +12V / 0V (off) |
6 | Analog Input 2 / RS-485 - |
7 | Digital Input 2 |
8 | GND |
Paramètre X2
| No | Signal |
|---|---|
| 1 | Digital Input 3 |
| 2 | Digital Output 3 |
| 3 | Digital Output 4 |
| 4 | Analog Input 3 / RS-485 + |
| 5 | +24V / +12V / 0V (off) |
| 6 | Analog Input 4 / RS-485 - |
| 7 | Digital Input 4 |
| 8 | GND |
Description des fonctions E/S
| Type | Description |
|---|---|
| Power | Régler l'alimentation interne sur 0 V (par défaut), 12 V ou 24 V |
| Digital Output | régler sur PNP (type de source, par défaut) ou NPN (type de récepteur) |
| Digital Input | PNP (type de source, par défaut) |
| Analog Input | régler sur Tension (0-10 V) ou Courant (4-20 mA, par défaut) |
| RS-485 | Débit en bauds max. 1 M |
Régler l'alimentation interne sur 0 V, 12 V ou 24 V. Les spécifications électriques sont présentées ci-dessous :
| Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Avertissement
- Configurez l'outil et la pince de sorte qu'ils ne présentent aucun risque de danger lorsque l'alimentation est éteinte.
(exemple : workpiece tombant de l'outil) - La borne n° 5 de chaque connecteur fournit 24 V en permanence lorsque l'alimentation est fournie au robot ; veillez donc à couper l'alimentation du robot lors de l'installation de l'outil et de la pince de préhension.