
Coup de pouce
Réglage d'inclinaison
Si le robot s'arrête dans la zone collaborative en raison du mode d'arrêt de sécurité SS2 ou RS1, , La réinitialisation n'est pas disponible en état interrompu, mais le travail peut être repris avec l'entrée de décalage
- Pour définir le déplacement latéral, sélectionner robot > élément déplacement latéral dans la cellule de travail robot.
Pour plus d'informations, consultez Configuration de Nudge (Pousser) .
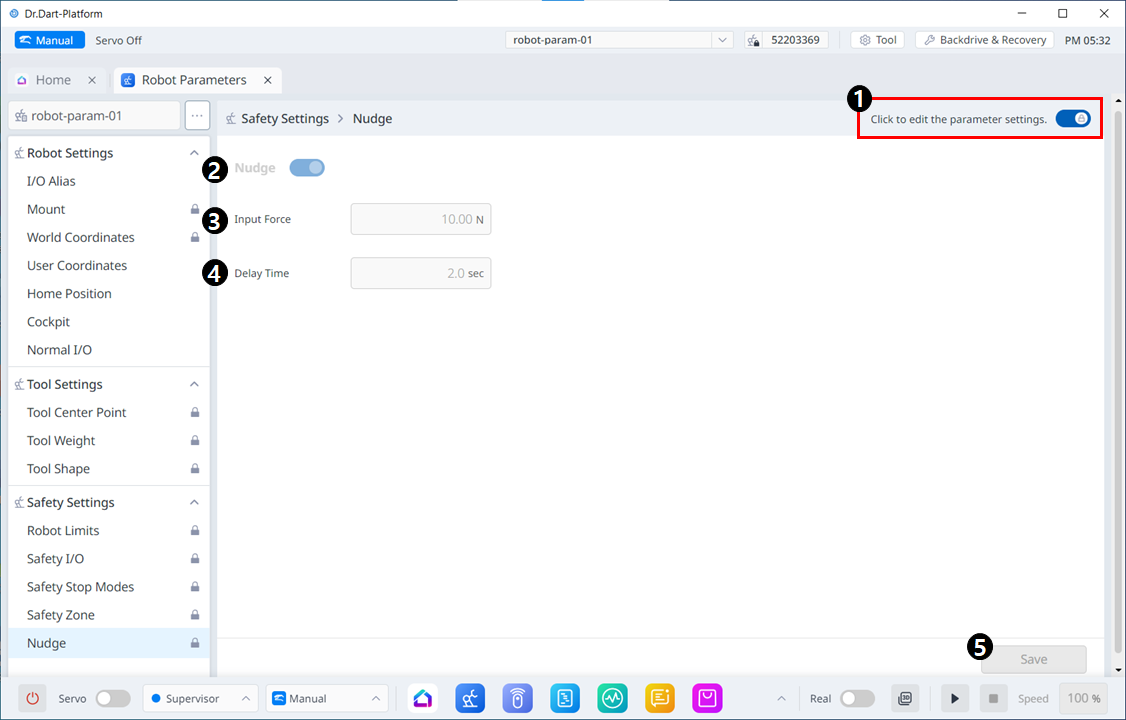
Options de menu
| Article | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Indique s'il faut utiliser Nudge | Ce bouton vous permet de choisir d'utiliser ou non le décalage. |
| 3 | Entrée de force | Dans ce champ, la valeur de force souhaitée est saisie. |
| 4 | Temps de retard | Ce champ permet de définir le délai. |
| 5 | Enregistrer | Ce bouton vous permet d'enregistrer la valeur que vous avez définie. |