
Vue d'ensemble de l'angle d'Euler
L'angle d'Euler est un moyen d'exprimer les angles des axes X, y et Z, qui sont perpendiculaires entre eux dans la direction de l'objet. A, B et C font référence aux angles de rotation séquentiels. Chaque fabricant de robot définit cet ordre de rotation A, B et C différemment, comme Rz-Ry-Rz, Rz-Ry-Rx ou Rx-Ry-Rz.
Doosan Robotics utilise Rz-Ry-Rz. Ici, Rz signifie la rotation dans l'axe Z, et Ry signifie la rotation dans l'axe Y. Rz peut être exprimé comme angle A, Ry comme angle B et Rz comme angle C pour indiquer la direction de rotation actuelle d'un objet. Notez qu'une fois la rotation effectuée dans la direction de l'axe Z à partir des coordonnées, les rotations seront effectuées en fonction des nouvelles coordonnées.
Ceci peut être visualisé avec les étapes 1 à 4.
Supposons qu'il existe des coordonnées (X, y, Z).
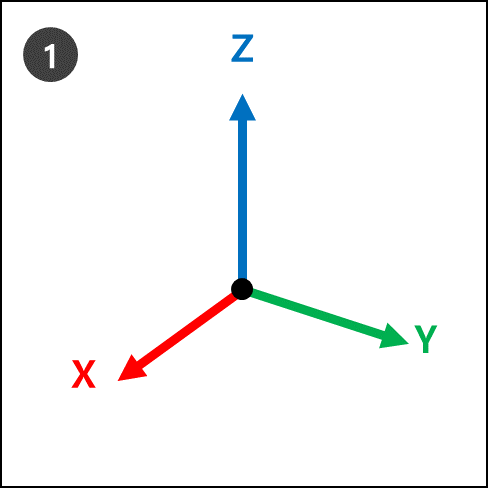
Rz: Faire pivoter D'Un degré par rapport à l'axe Z.

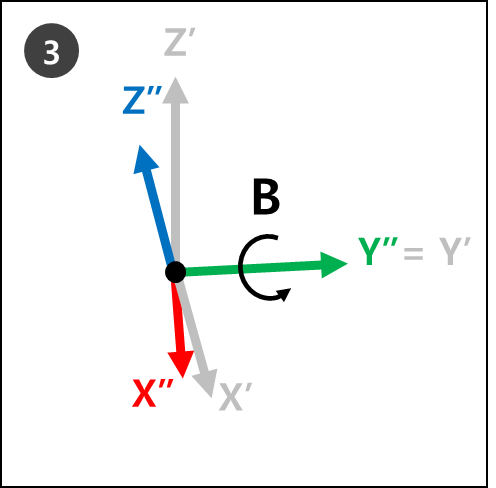
Ry : Faites pivoter de B degrés à partir du nouvel axe y (y’) des nouvelles coordonnées (X’, Y’, Z’) à l’étape 2.
Rx : Faites pivoter de B degrés à partir du nouvel axe Z (Z’’) des nouvelles coordonnées (X’’, Y’’, Z’’) à l’étape 3.
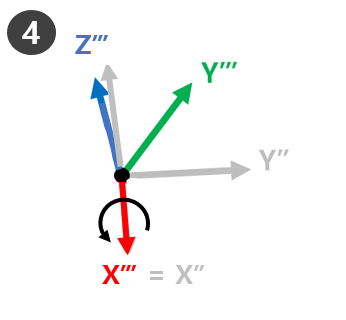
Les nouvelles coordonnées (Z’’’, Y’’, X’’’ de l’étape 4 font référence à la rotation actuelle du robot lorsque les angles d’Euler A, B et C sont appliqués.
Cela peut être facilement visualisé avec sa main droite. Faites la pose suivante avec votre main droite. C'est ce qu'on appelle la règle de la main droite, et rendre le pouce (axe X), l'index (axe y) et le majeur (axe Z) perpendiculaires les uns aux autres créera des coordonnées composées des axes X, y et Z.
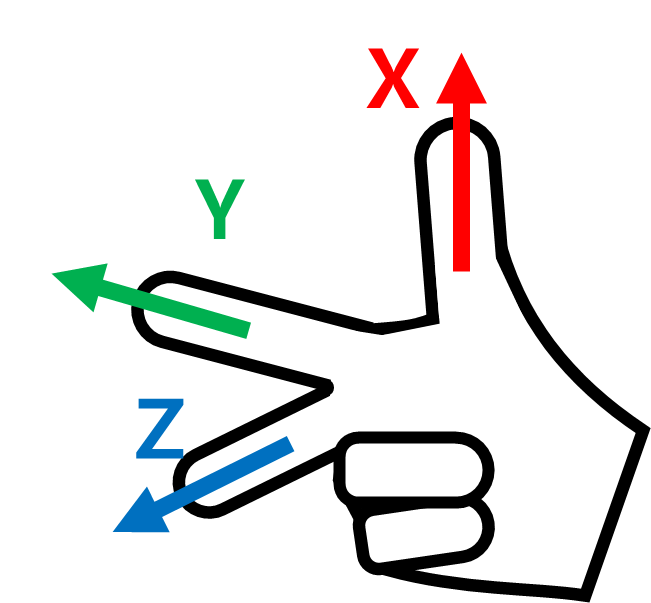
Faites ensuite la pose cartésienne de la règle de droite et effectuez les rotations Rz, Ry et Rx dans l'ordre séquentiel.
Rz : Faites pivoter le majeur (axe z) de A degrés.
Ry : Faites pivoter l'index (axe y) de B degrés.
Rx : Faites pivoter le majeur (axe x) de C degrés.
Remarque
La direction de rotation + de A, B et C est la direction de quatre doigts sauf le pouce, lorsque le pouce pointe vers la direction + et que les quatre doigts sont serrés. C'est ce qu'on appelle la loi de la vis dans le sens horaire.
