
Exécution basée sur robot Tool

Pour déplacer le robot en fonction de l'outil robot, procédez comme suit :
- Sélectionnez base ou monde comme coordonnées d'affichage et définissez l' outil en fonction du point de référence des coordonnées de la tâche.
- Sélectionnez les coordonnées de l'outil à déplacer.
- Appuyez sur le bouton de direction (+,_) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Remarque
- La zone de sécurité ne s'applique pas en mode virtuel.
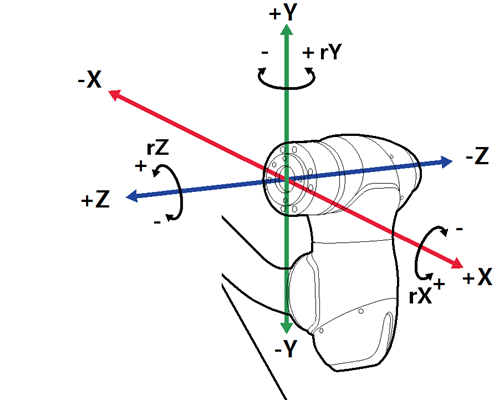
- Rx, Ry et Rz sont exécutés en fonction de TCP (position du centre de l'outil).