
Définition des coordonnées à déplacer en fonction de l'outil
Pour déplacer le robot en fonction des coordonnées de l'outil, procédez comme suit :
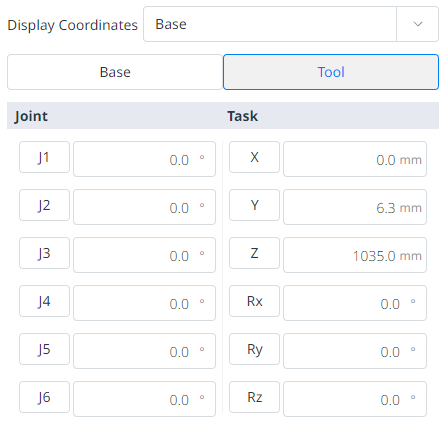
- Sélectionnez l' onglet déplacer et sélectionnez l' onglet tâche.
- Sélectionnez l' onglet outil.
- Configurez la pose pour qu'elle se déplace par rapport à l'outil.
- Appuyez sur le bouton déplacer vers la pose correspondante et maintenez-le enfoncé pour accéder aux coordonnées définies.