
Présentation des concepts de base de la commande déplacer de l'éditeur de tâches
OBLIGATOIRE FACILE 5 MIN
Les robots Doosan Robotics offrent neuf mouvements. Le mouvement du robot est contrôlé par des mouvements standard, MoveJ et MoveL, et 7 mouvements dérivés de ces deux mouvements.
Types de mouvement du robot
| Mouvement | Fonction | |
|---|---|---|
| 1 | MoveJ | Chaque articulation du robot se déplace de l'angle actuel à l'angle cible et s'arrête simultanément
|
| 2 | MoveL | Le robot se déplace vers le point cible tout en maintenant le TCP du robot droit
|
| 3 | MoveSJ | Le robot se déplace dans tous les angles définis par le robot
|
| 4 | MoveSX | Le TCP robot se déplace sur tous les points
|
| 5 | MoveJX | La pose du robot est désignée lorsque le TCP du robot se déplace vers le point cible
|
| 6 | MoveC | TCP robot se déplace vers le point cible tout en maintenant un arc
|
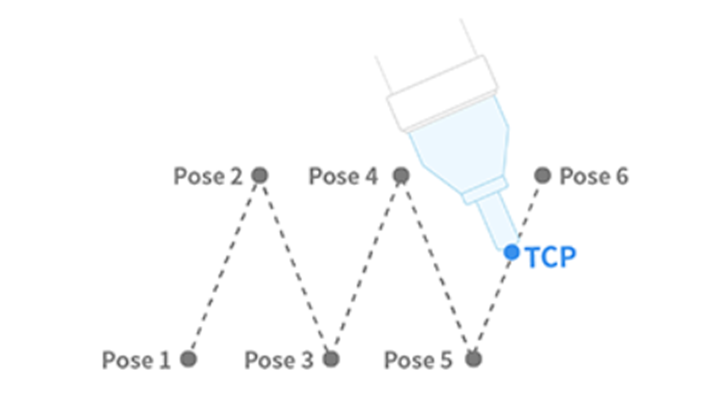
| 7 | MoveB | Le robot se déplace vers le point cible final à travers une section composée de lignes droites et d'arcs continus
|
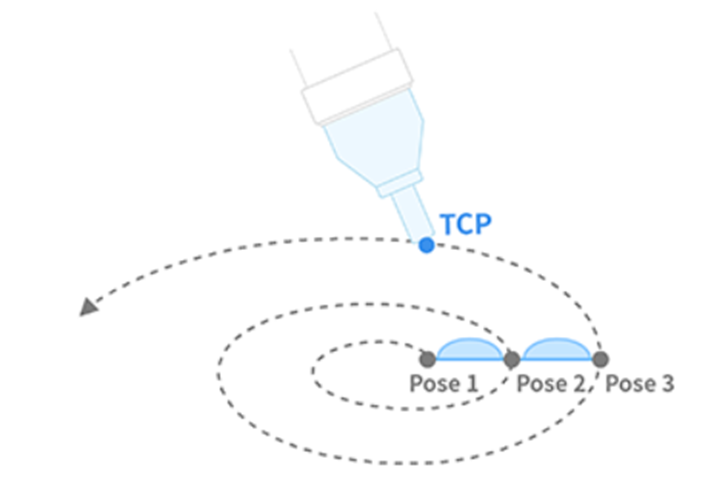
| 8 | MoveSpiral | Le robot se déplace du centre de la spirale au rayon maximum
|
| 9 | MovePeriodic | Le robot se déplace dans un chemin avec une amplitude et un cycle constants
|


MoveJ&MoveL
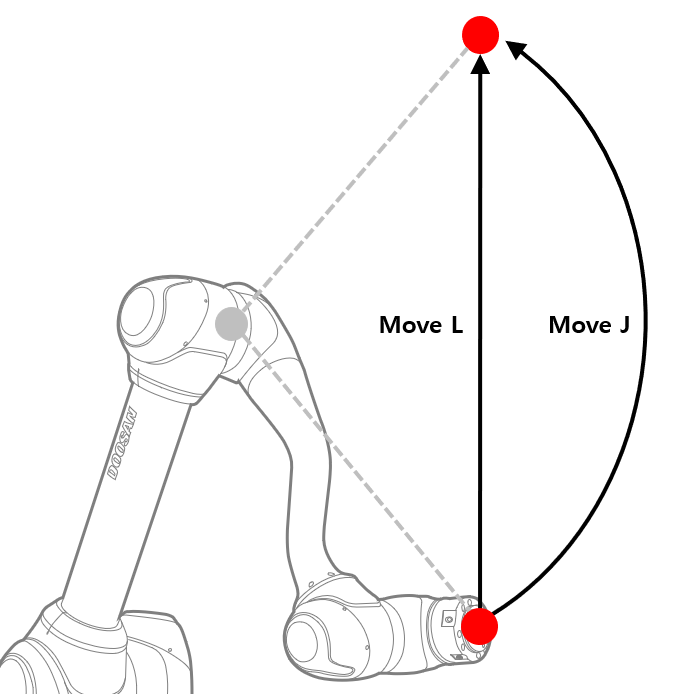
Avant d'utiliser le mouvement du robot, il est essentiel de comprendre les mouvements standard MoveJ et MoveL.
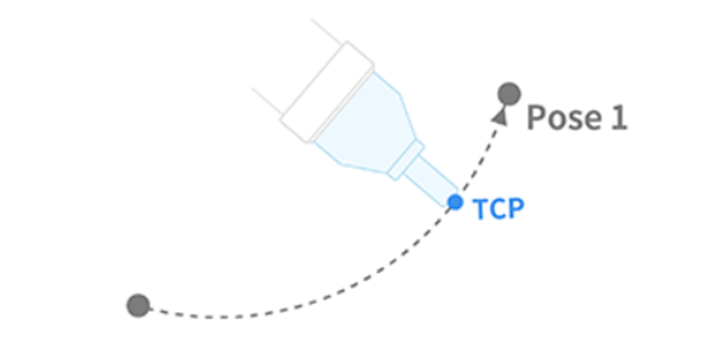
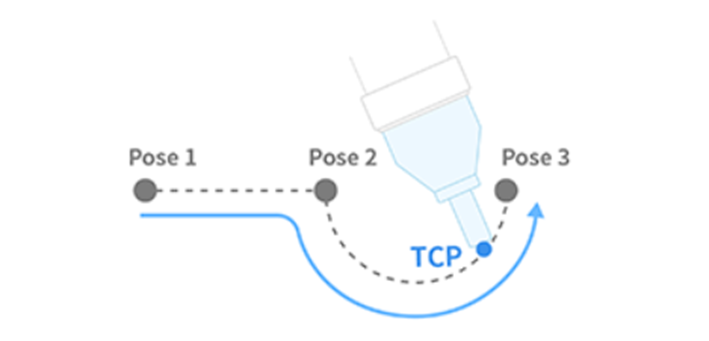
- J dans MoveJ fait référence aux articulations. Dans ce mouvement, chaque articulation se déplace vers l'angle cible et s'arrête simultanément.
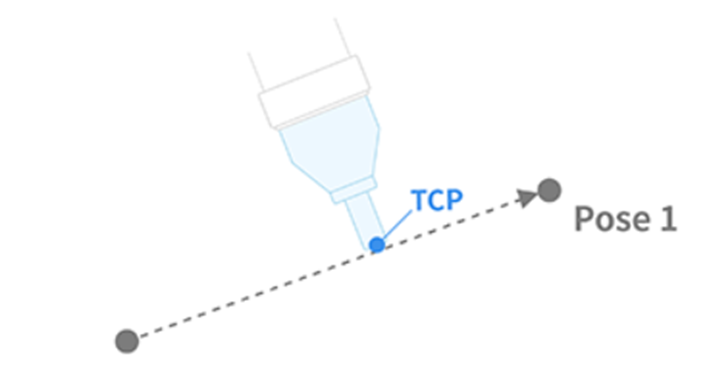
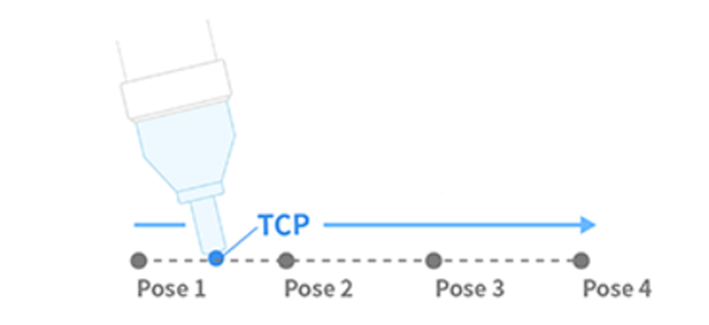
- L dans MoveL fait référence à linéaire. Dans ce mouvement, le TCP à l'extrémité du robot se déplace vers la pose cible (position et angle) avec un mouvement linéaire.
| Type | MoveJ | MoveL | |
|---|---|---|---|
| 1 | Méthode de déplacement |
|
|
| 2 | Avantage |
|
|
| 3 | Inconvénient |
|
|
| 4 | Utilisation |
|
|