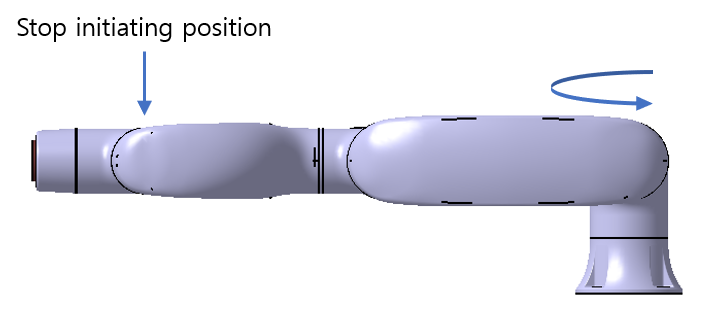
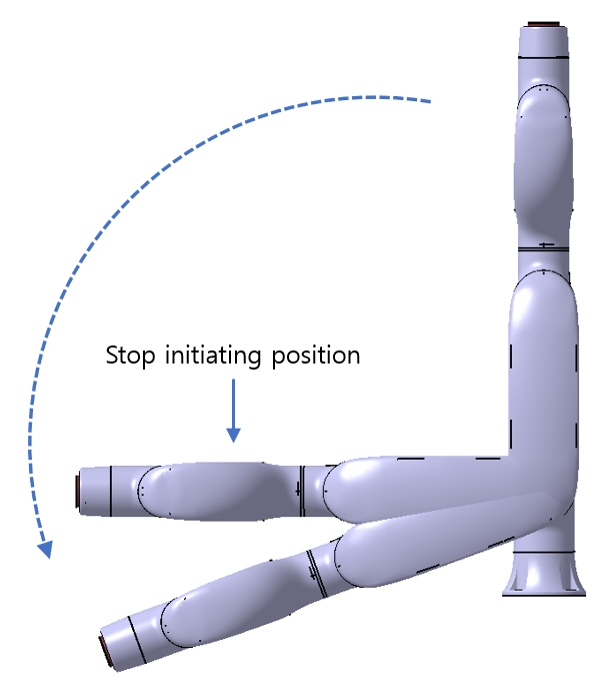
La mesure de l'articulation 1 est effectuée avec l'axe de rotation perpendiculaire au sol et au cours d'un mouvement horizontal.
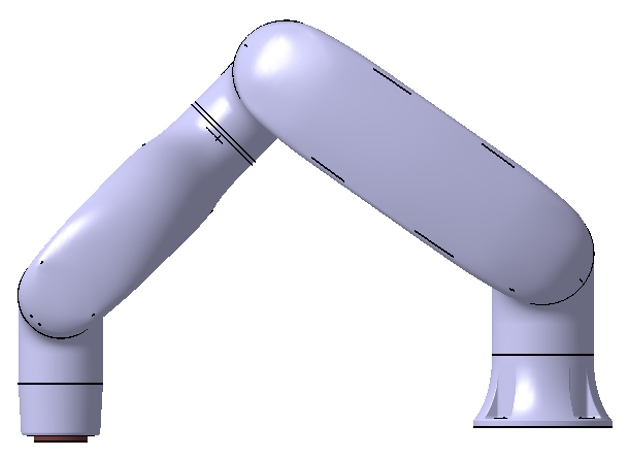
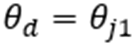
Les mesures de l'articulation 2 et de l'articulation 3 sont effectuées avec l'axe de rotation parallèle au sol et lorsque le robot est arrêté au cours d'un mouvement descendant en position verticale par rapport au sol.
Remarque
Le pire des scénarios a été pris en compte pour établir les mesures. Les mesures peuvent varier selon les circonstances.
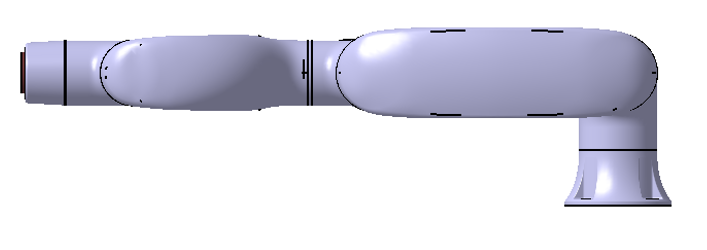
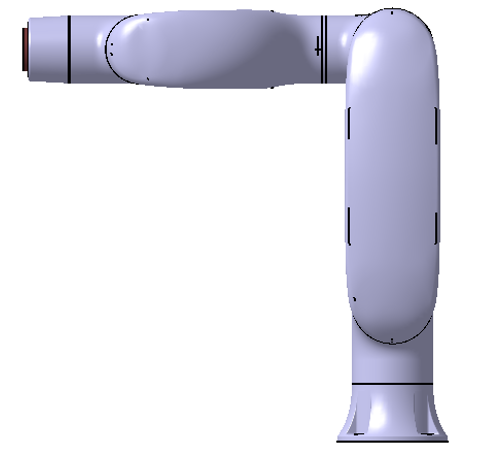
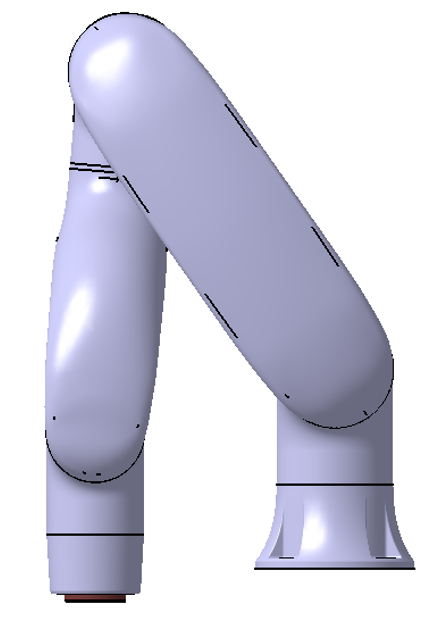
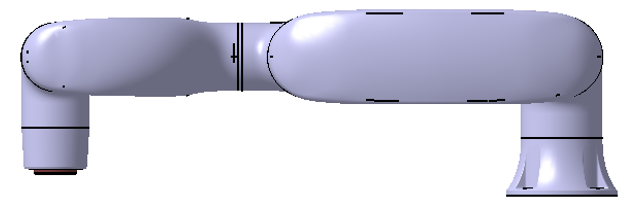
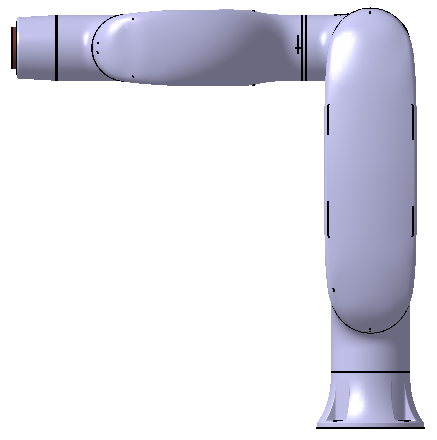
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
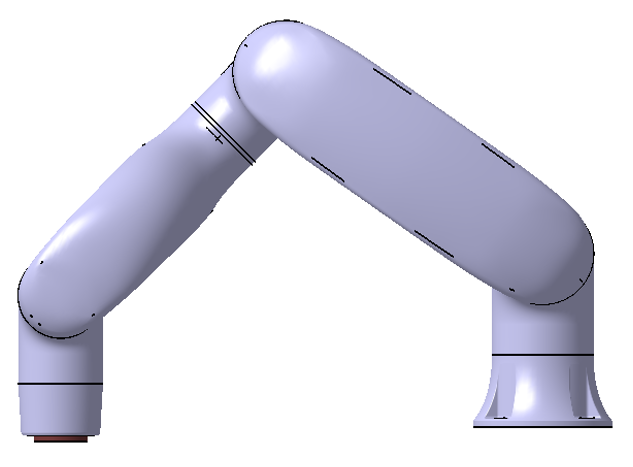
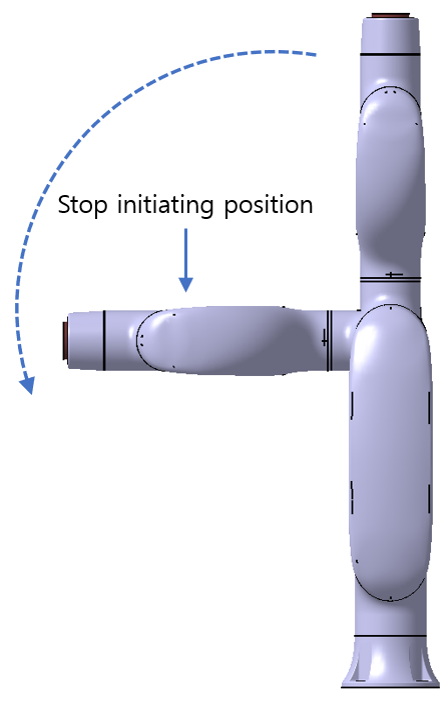
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.