Centre de l'outil
Lors de la configuration du point central de l'outil (TCP), la position et l'angle de rotation basés sur les coordonnées du bord tombé doivent également être définis. A ce stade, la distance entre le point de départ par défaut de la coordonnée du bord tombé et le point central de l'outil (TCP) dansle X, Les directions y et Z ne peuvent pas être définies pour être supérieures à 10000 mm.Notez également que Force Control, Compliance Control 
Si le point central de l'outil (TCP) est configuré à l'aide de calcul automatique, le calcul est effectué uniquement sur la base des positions X, y et Z, il est donc nécessaire d'entrer l'angle de rotation. L'angle de rotation peut être défini avec RZ, RY et RX et il est basé sur la méthode de rotation « Euler Z-Y-Z ».
Les définitions de l'axe des coordonnées exprimé avec x, y, z et de l'axe des coordonnées exprimé avec X, y, Z sont les suivantes:
- Axe des coordonnées de “coordonnée du bord tombé” (x, y, z): La direction de l'axe des coordonnées de la «coordonnée de la bride »définie à l'extrémité de la bride est identique à la coordonnée du robot lorsque l'angle d'articulation du robot est (0,0,0,0,0,0).
- Axe des coordonnées de la “coordonnée TCP” (X, y, Z): Ceci est réglé à l'extrémité ou au point de travail de l'outil installé sur l'extrémité de la bride. A ce stade, l'angle de rotation de la «coordonnée TCP» est défini en fonction de la « coordonnée de bord tombé»dans l'ordre de 1) à 3) des éléments suivants:
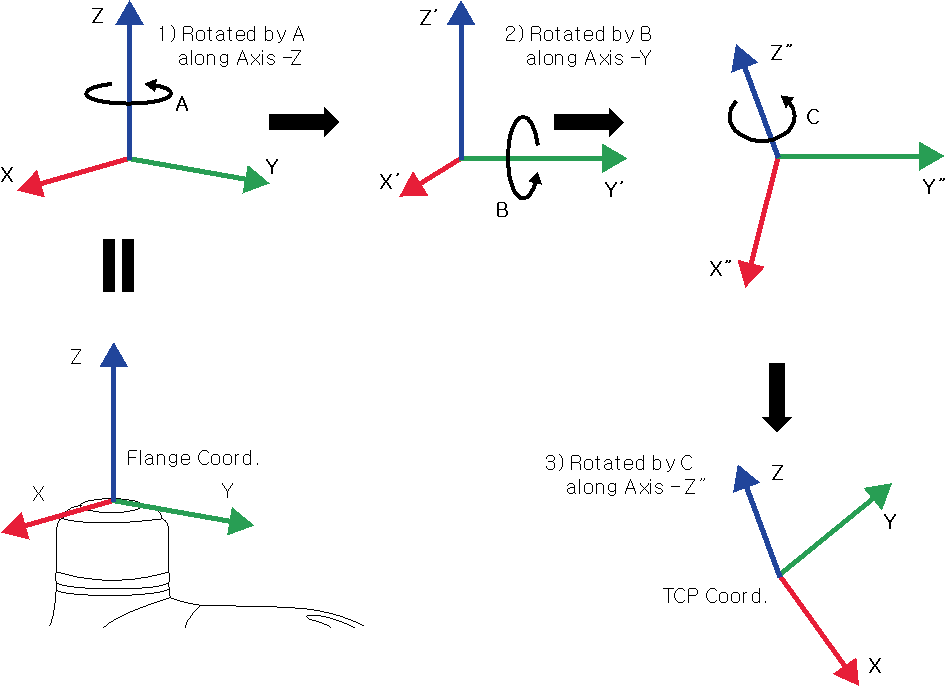
1) faites pivoter Un degré le long de l' axe z de la coordonnée de la bride.
2) faire pivoter B degrés le long de l’ axe y’ de la coordonnée tournée selon 1).
3) faire pivoter C degrés le long de l’axe z’’ de la coordonnée pivotée selon 2).
Voici quelques exemples de configuration du TCP selon la méthode décrite ci-dessus:
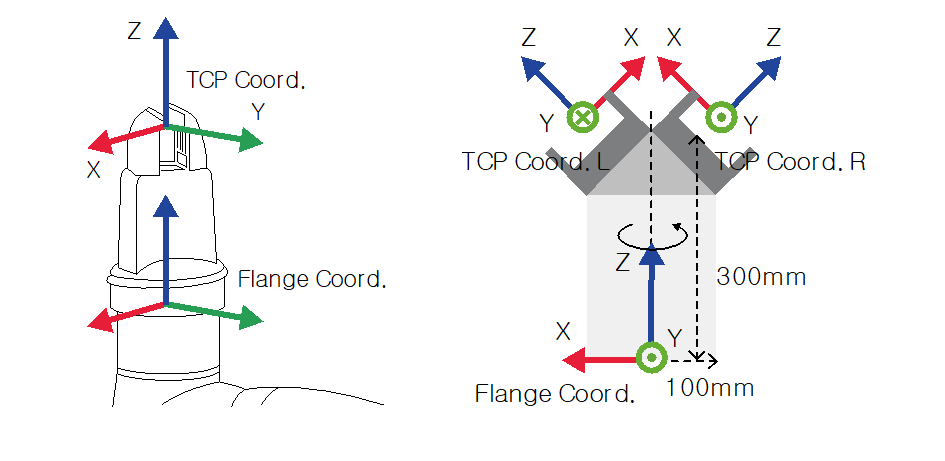
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0] : Pince générale avec seulement un décalage dans la direction Z (Coord TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0] : Pince gauche avec angle de 45 degrés (Coord. TCP L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0] : Pince droite avec angle de 45 degrés (Coord. TCP R)
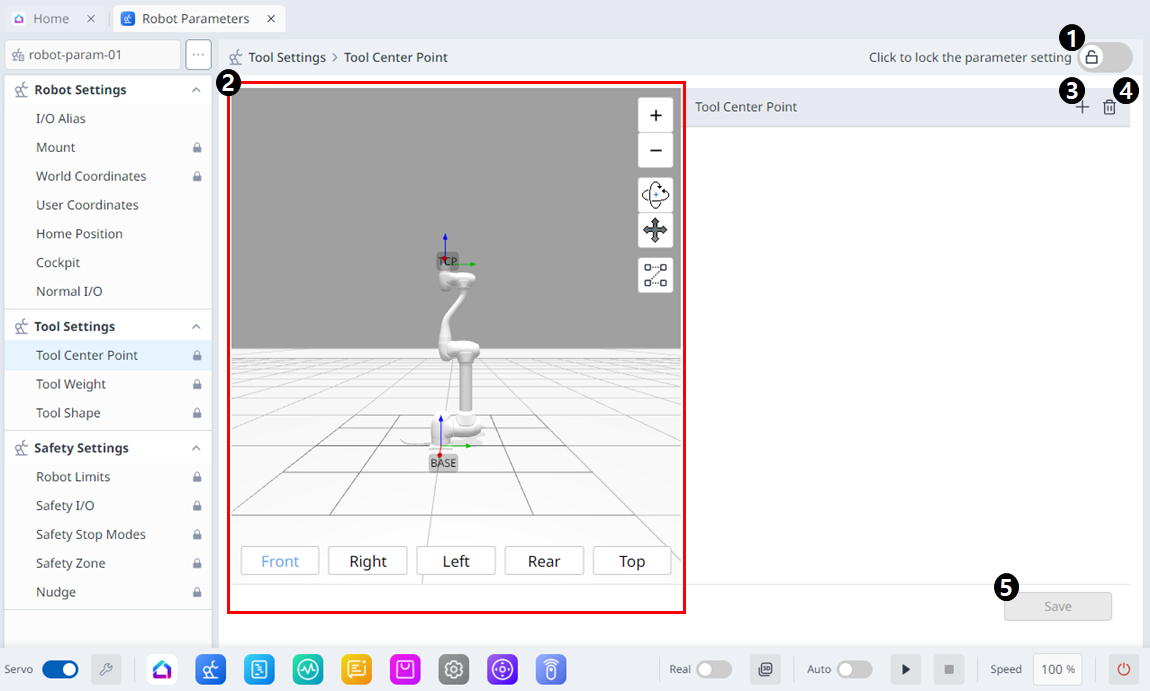
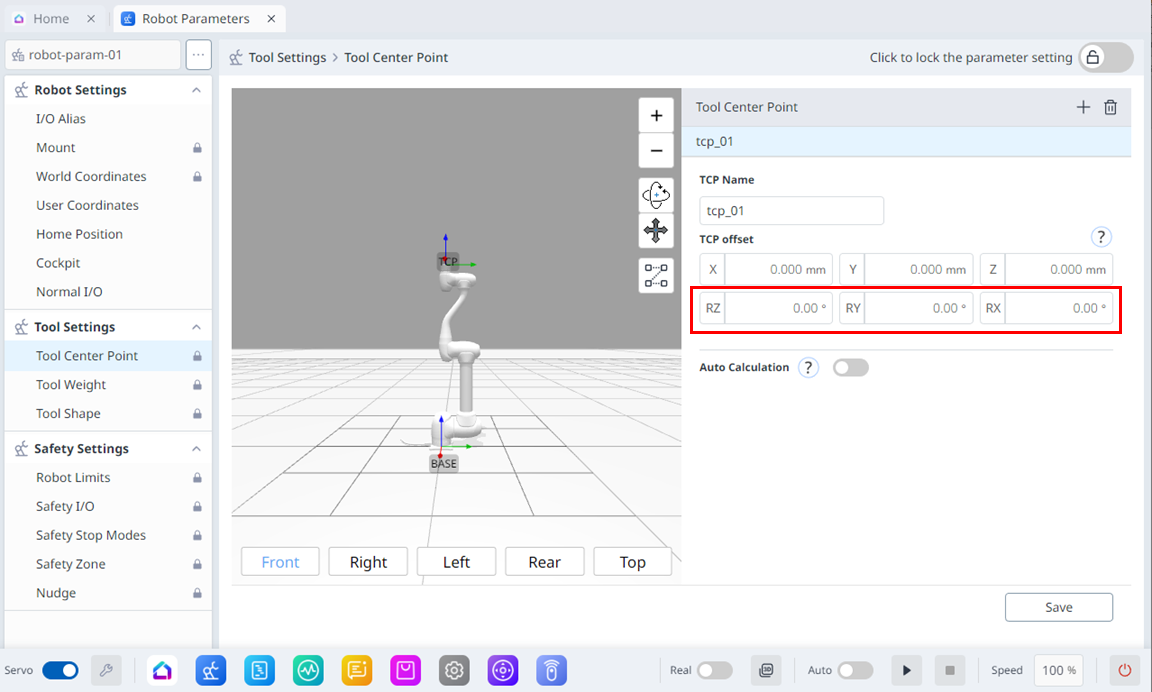
| Article | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur. |
| 2 | Simulation 3D. | C'est ici que vous pouvez simuler le point central de l'outil configuré. |
| 3 | Ajout | Ce bouton vous permet d'ajouter TCP. |
| 4 | Suppression | Ce bouton vous permet de supprimer le TCP sélectionné. |
| 5 | Enregistrer | Ce bouton permet d'enregistrer les valeurs de réglage. |
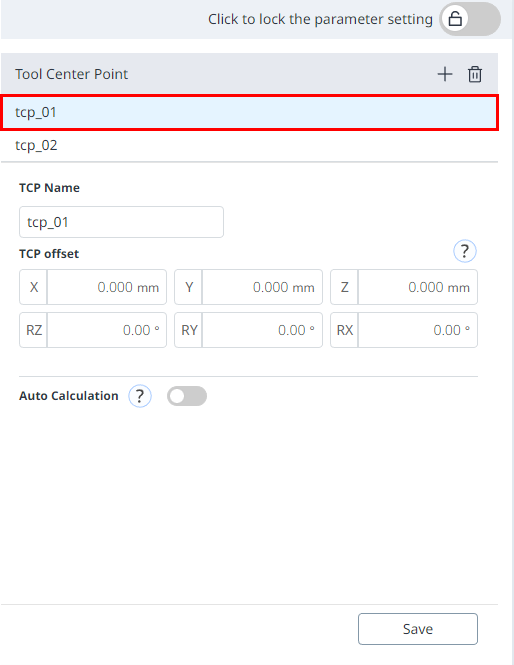
Lorsque les paramètres sont verrouillés, l'écran ci-dessous s'affiche.
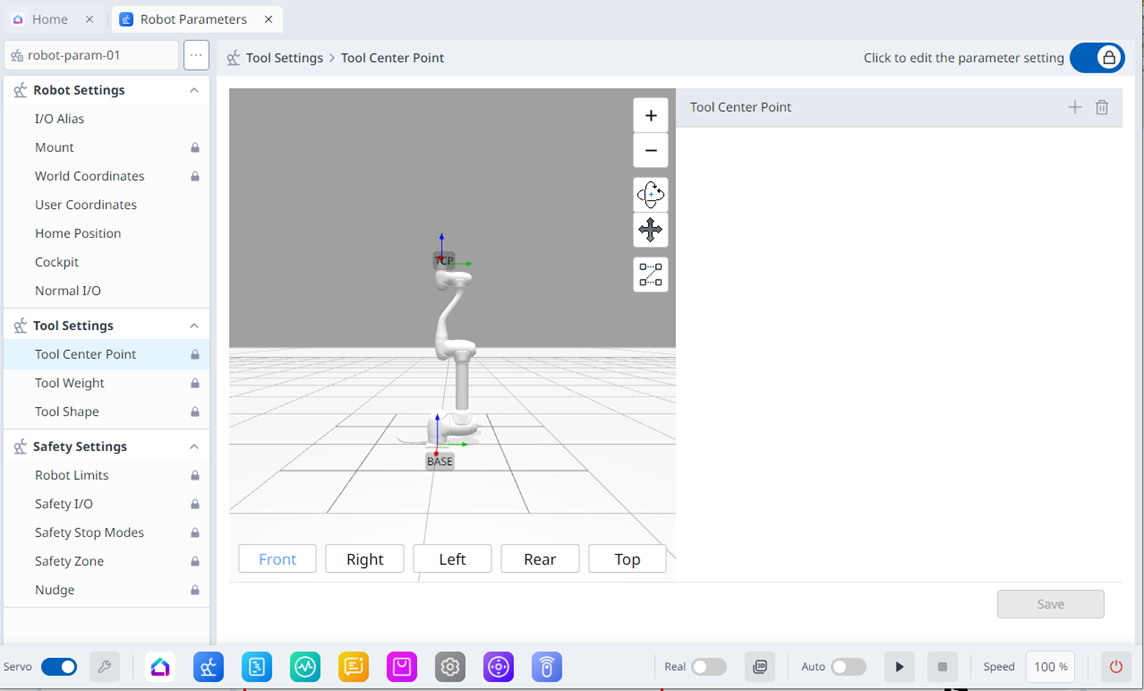
À ce stade, le TCP sélectionné apparaît en bleu, comme illustré ci-dessous.