
Connexion E/S du contrôleur
Les bornes E/S du contrôleur peuvent être utilisées pour connecter des équipements externes autres que des manipulateurs et la poignée de commande d'apprentissage au contrôleur. Outre les dispositifs de sécurité tels que l'interrupteur d'arrêt d'urgence, la barrière immatérielle et les tapis de sécurité, divers périphériques nécessaires à la configuration d'une cellule de travail robotisée, tels que des électrovannes pneumatiques, des relais, des API et des encodeurs de bande transporteuse peuvent être connectés.
L' E/S du contrôleur est organisée comme suit.
- Bornier pour entrée par contact de sécurité (TBSFT) : pour connecter les dispositifs requis pour l'arrêt d'urgence et l'arrêt de protection
- Bornier d'alimentation E/S numérique (TBPWR)
- Bloc E/S numérique configurable (TBCI1- 4, TBCO1- 4) : pour connecter les périphériques nécessaires au fonctionnement du robot
- Bornier d'E/S analogique (BTAIO)
- Bornier pour entrée encodeur (TBEN1, TBEN2)
- Bornier pour sortie de contact de sécurité (TBSTO) : pour la connexion à la ligne d'alimentation des périphériques du robot et l'arrêt du robot lorsqu'il entre dans l'état STO en coupant également l'alimentation des périphériques
La figure ci-dessous illustre la disposition de l'interface électrique à l'intérieur du contrôleur.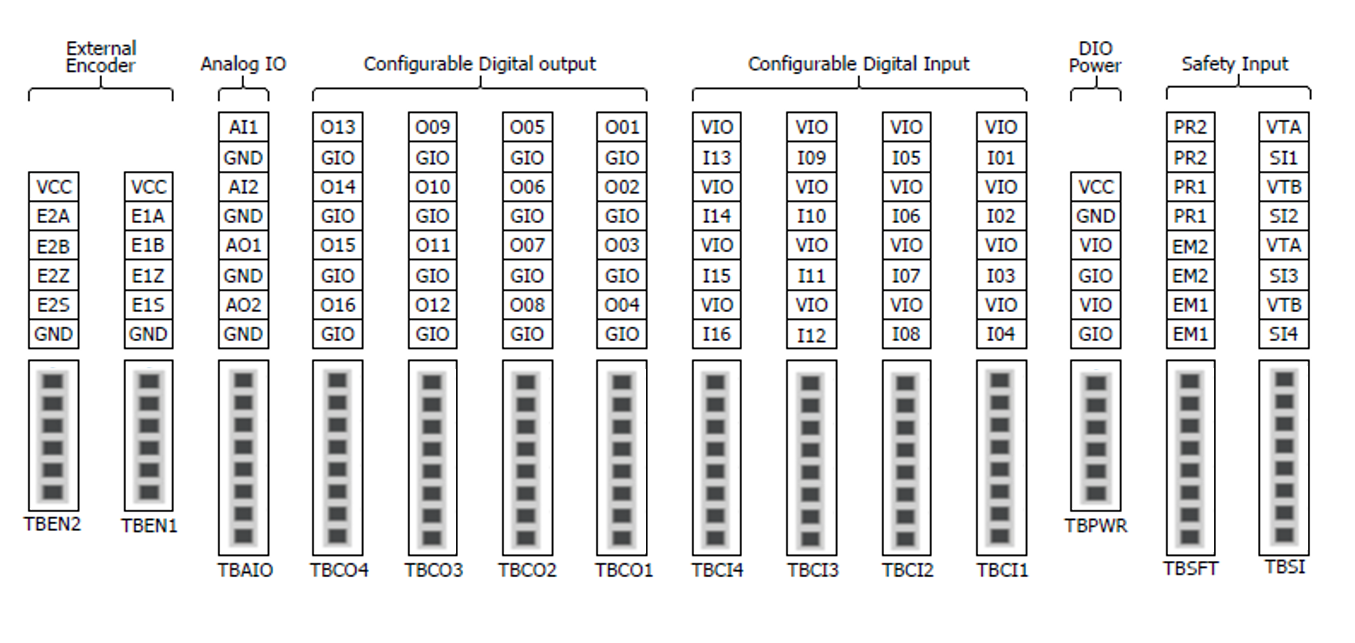
Attention
- Pour éviter tout risque d'endommagement et de dysfonctionnement du produit, veillez à couper l'alimentation lorsque vous connectez des bornes aux E/S.
- Doosan Robotics ne compensera pas les dommages causés au produit en raison d'une mauvaise connexion des terminaux ou d'une négligence de l'utilisateur.
- Lorsque vous mettez le contrôleur hors tension, assurez-vous d'éteindre également la source d'alimentation externe.