
Qu'est-ce que la singularité ?
La singularité dans un robot multi-joint fait référence à une position (ou point) où le robot a de la difficulté à calculer sa pose suivante pendant le déplacement. Les robots multi-joints calculent chaque angle de joint pendant le mouvement en fonction de l'extrémité du robot
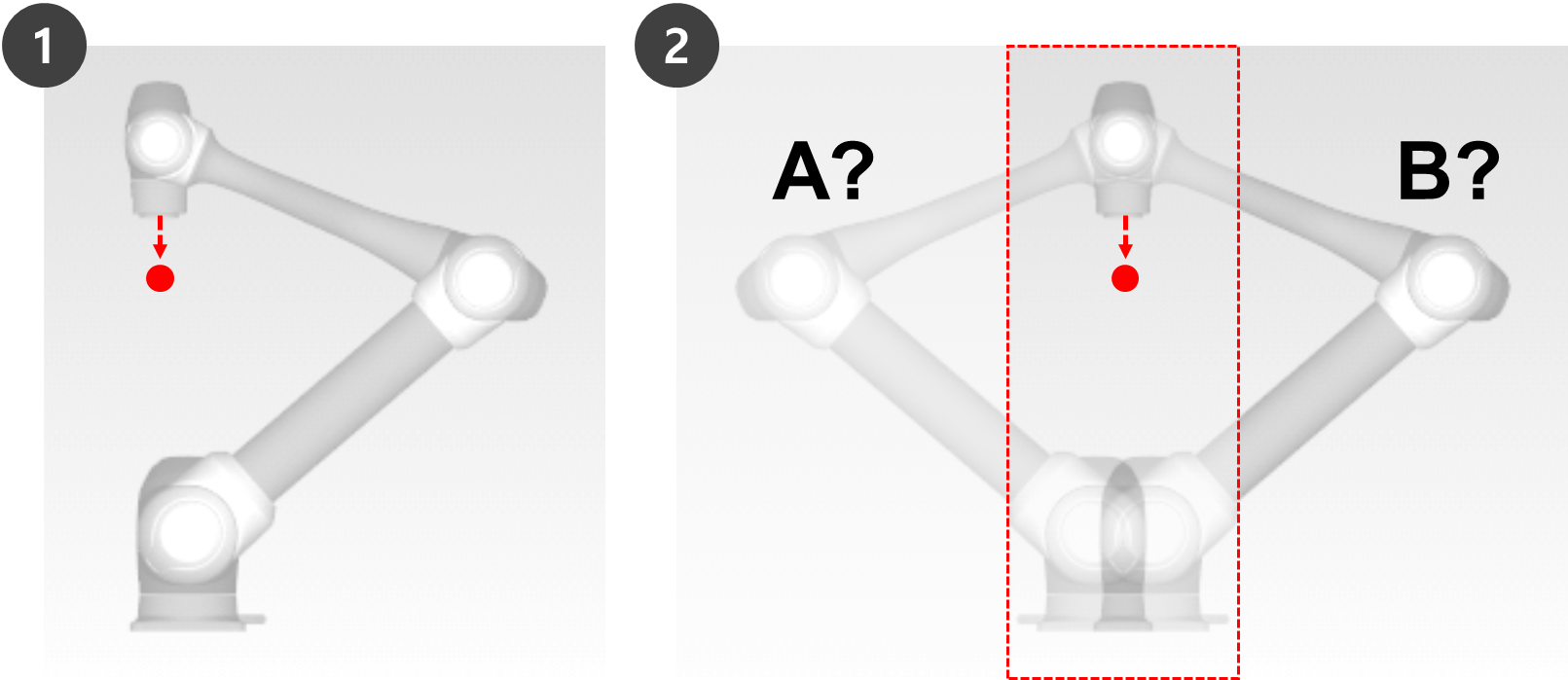
Par exemple, dans la Fig.1 ci-dessous, lorsque le robot se déplace vers le point rouge, il ne pourra pas déterminer s'il doit déplacer ses joints pour définir la position A ou B, comme illustré à la Fig.2. Cette position (ou point) est appelée singularité.
Près d'une singularité, le mouvement du robot n'est pas fluide en termes de plan, de point et de ligne, le mouvement linéaire d'extrémité du robot peut ne pas être maintenu et l'erreur de position pendant le contrôle peut augmenter. La singularité se produit dans trois cas, comme illustré dans la figure suivante, y compris lorsque les liaisons du robot forment une ligne.
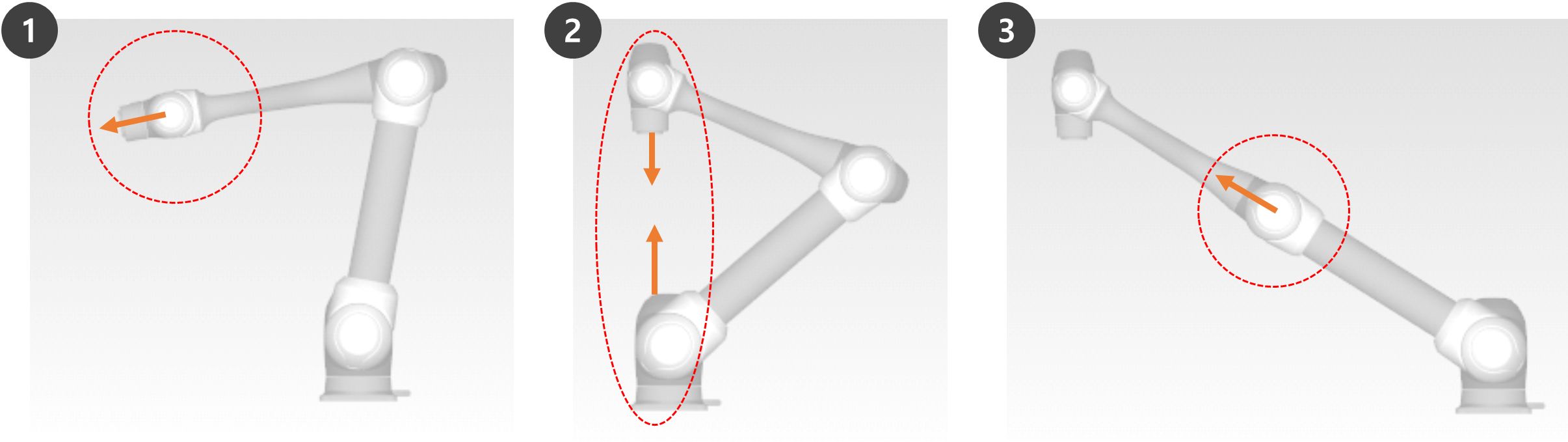
Singularité du poignet : Lorsque le poignet du robot forme une ligne à mesure que l'axe 5 s'approche de 0º
- Par rapport à un bras humain, les axes 4, 5 et 6 correspondent à l'articulation du poignet.
- Singularité de l'épaule : Lorsque les axes 1 et 6 sont sur la même ligne
- Par rapport à un bras humain, les axes 1 et 2 correspondent à l'articulation de l'épaule.
- Singularité du coude : Lorsque le robot forme une ligne lorsque l'axe 3 approche de 0º
- Par rapport à un bras humain, l'axe 3 correspond au coude.
Attention
Les opérations manuelles et automatiques se déplaçant avec la rotation de joint ne sont pas influencées par la singularité.
- Mouvement de tâche, commande MoveL, etc
- La singularité se produit uniquement lors d'un fonctionnement manuel et automatique où le robot se termine par un mouvement linéaire.
- Mouvement de joint, commandes MoveJ, etc
- Dans la zone de singularité, le contrôle de force ou de conformité n'est pas disponible.
- Comme la vitesse de rotation de certains axes augmente rapidement lorsqu'un mouvement linéaire passe une singularité, il est possible qu'une violation de la limite de vitesse de liaison ou de la limite d'angle de liaison se produise.
Comment éviter la singularité
Les robots Doosan Robotics offrent des options permettant d'éviter les singularités pendant le contrôle d'axes. Toutefois, il est recommandé de configurer une tâche qui ne crée pas d'exceptions à l'aide de commandes de mouvement de liaison telles que MoveJ dans les zones de singularité.