
E/S à bride
Le connecteur fournit l'alimentation et les signaux de contrôle nécessaires au fonctionnement de la pince de préhension ou des capteurs intégrés dans les outils spécifiques du robot. Les câbles suivants sont des exemples de câbles industriels (des câbles équivalents peuvent être utilisés) :
- Phoenix contact 1404178 (droit)
- Phoenix contact 1404182 (angle droit)
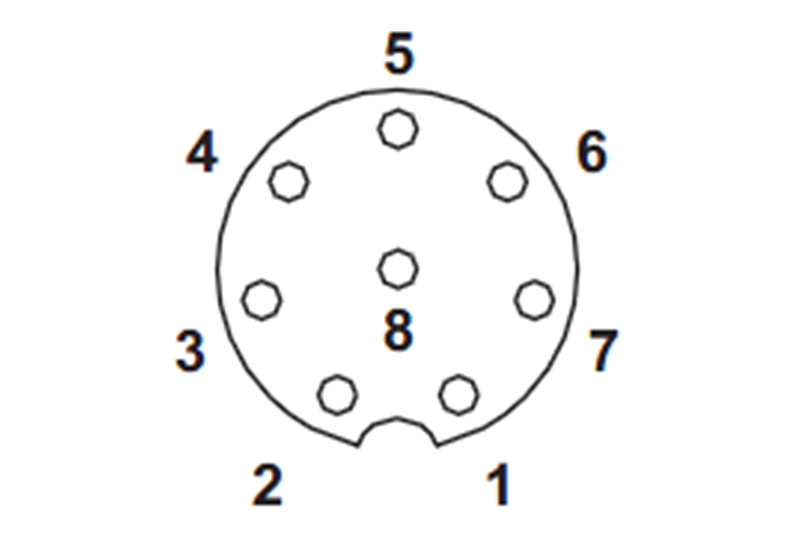
Le schéma des broches pour chaque connecteur est le suivant :
Diagramme schématique
Avertissement
- Configurez l'outil et la pince de sorte qu'ils ne présentent aucun risque de danger lorsque l'alimentation est éteinte.
(exemple : workpiece tombant de l'outil) - La borne n° 5 de chaque connecteur fournit 24 V en permanence lorsque l'alimentation est fournie au robot ; veillez donc à couper l'alimentation du robot lors de l'installation de l'outil et de la pince de préhension.