
Smart Pendant Setting (Configuration du boîtier intelligent)
Mise en garde
Smart Pendant Setting (Configuration du boîtier intelligent) est un écran permettant de définir les fonctions fournies comme options de la série A.
- Sélectionnez le menu Remote Control (Contrôle à distance) dans le menu Smart Pendant Setting (Configuration du boîtier intelligent).
- Les paramètres actuels s'affichent dans la fenêtre de gestion des paramètres.
- Réglez le bouton à bascule Use Smart Pendant (Utilisation du boîtier intelligent) sur ON (activé).
- Si le système est redémarré avec Use Smart Pendant (Utilisation du boîtier intelligent) défini sur On (activé), l'initialisation a lieu en mode de contrôle à distance.
- Select Task (Sélectionner tâche)
- Il s'agit de la tâche à utiliser en mode Smart Pendant (Boîtier intelligent).
- Cliquez sur le bouton Confirm (Confirmer) et cliquez sur le bouton Start Smart Pendant (Démarrage du boîtier intelligent).
- L'écran du tableau de bord du Smart Pendant (Boîtier intelligent) est affiché et les commandes utilisant Smart Pendant (Boîtier intelligent) deviennent disponibles.
- Lorsque le mode Smart Pendant (Boîtier intelligent) lance Windows, l'écran du boîtier d'apprentissage passe aussi à l'écran Smart Pendant (Boîtier intelligent).
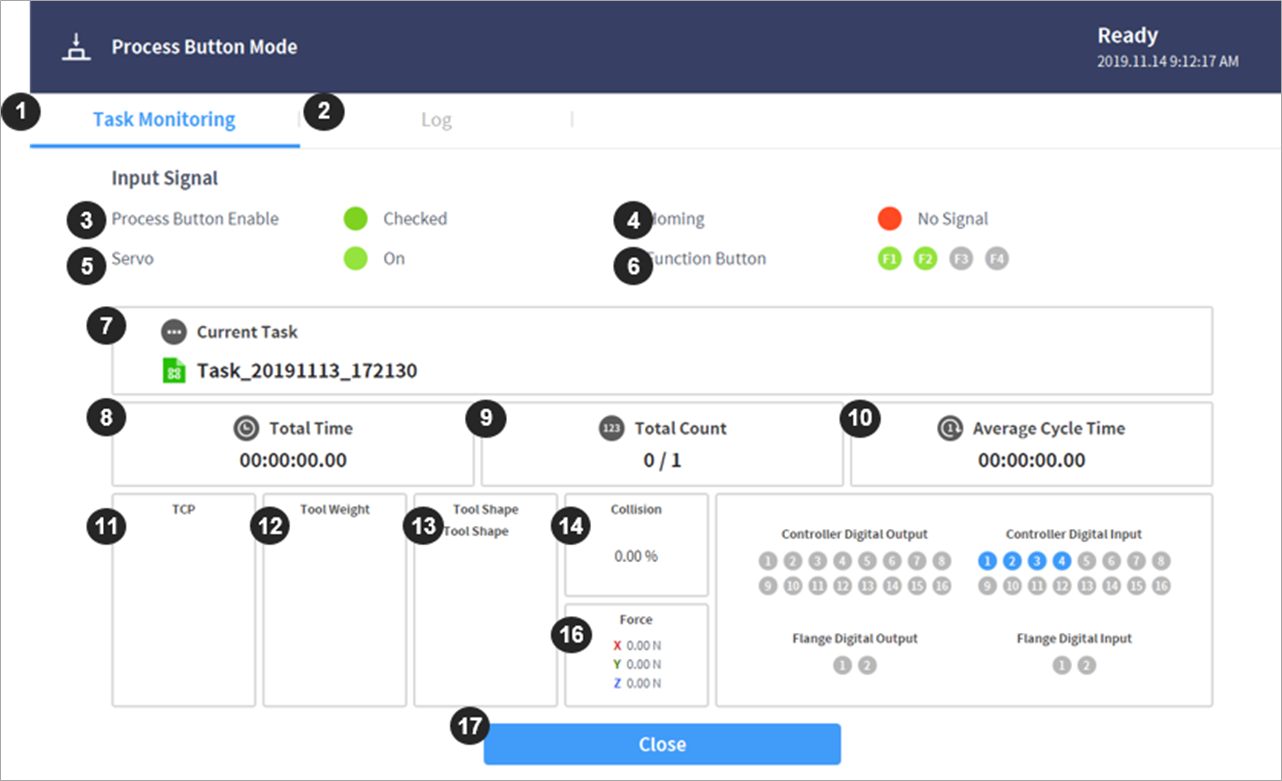
N° | Élément | Description |
1 | Task Monitoring Tab | Il s'agit de l'onglet qui affiche les informations de surveillance nécessaires pour l'exécution du signal d'entrée et la tâche du Smart Pendant (Boîtier intelligent). |
2 | Log Tab | Il s'agit de l'onglet qui affiche les messages de journal recueillis lors de l'exécution de la tâche. |
3 | Smart Pendant Enable Signal | Lorsque le Smart Pendant (Boîtier intelligent) est connecté au contrôleur, il est affiché comme vérifié (en vert). |
4 | Homming Signal | En cas d'appui sur le bouton de retour à la position d'origine Smart Pendant (Boîtier intelligent), l'indicateur est affiché comme vérifié (en vert). |
5 | Servo On/Off Signal | Affiche l'état du servo (activé/désactivé) |
6 | Function Button Signal | Indicateurs de l'état de pression P1-P4 |
7 | Current Task | Zone affichant la tâche à utiliser par le Smart Pendant (Boîtier intelligent) |
8 | Total Time | Durée de lecture totale de la tâche |
9 | Total Count | Nombre de boucles de tâche |
10 | Average Cycle Time | Durée de lecture moyenne de chaque cycle de tâche |
11 | TCP Indicator | Informations du TCP utilisées par la tâche actuelle |
12 | Tool Weight Indicator | Informations du poids de l'outil utilisées par la tâche actuelle |
13 | Tool Shape Indicator | Informations de la forme de l'outil utilisées par la tâche actuelle |
14 | Collision | Informations de seuil de collision |
15 | Force | Informations de force |
16 | Digital / Flange I/O information | Informations d'E/S à bride/numérique |
17 | Close | Bouton permettant de fermer le mode Smart Pendant (Boîtier intelligent). |
Remarque
Si un arrêt de sécurité ou un arrêt de protection a lieu en mode Smart Pendant (Boîtier intelligent), il est géré comme suit :
- Arrêt d'urgence : un message contextuel d'arrêt d'urgence s'affiche. Résolvez la cause de l'arrêt d'urgence et tournez ou tirez sur l'interrupteur d'arrêt d'urgence. La fenêtre contextuelle se ferme automatiquement.
- Arrêt de protection entraînant le passage à l'état Servo Off (Servo désactivé) : un message contextuel d'arrêt de protection s'affiche en rouge. Si le bouton Servo On (Servo activé) du boîtier intelligent est actionné après la suppression de la cause de l'arrêt de protection, le servo du robot s'active et la fenêtre contextuelle se ferme automatiquement.
- Arrêt de protection entraînant le passage à l'état Interrupted (Interrompu) : un message contextuel d'arrêt de protection s'affiche en jaune. Si le bouton Reset (Réinitialisation) est actionné après la suppression de la cause de l'arrêt de protection, le robot passe à l'état de veille normal : Manual Standby (Veille manuelle), Auto Standby (Veille auto) ou HGC standby (Veille HGC)
En cas de problèmes de sécurité dont la cause ne peut pas être éliminée sans déplacer le robot, vous pouvez utiliser la fonction Clamping Escape by cockpit (Échappement serrage par le cockpit). - Pour plus de détails sur l'état de chaque mode, veuillez vous reporter à « État et couleur de la LED de la bride pour chaque mode»