Réglage du contrôle à distance
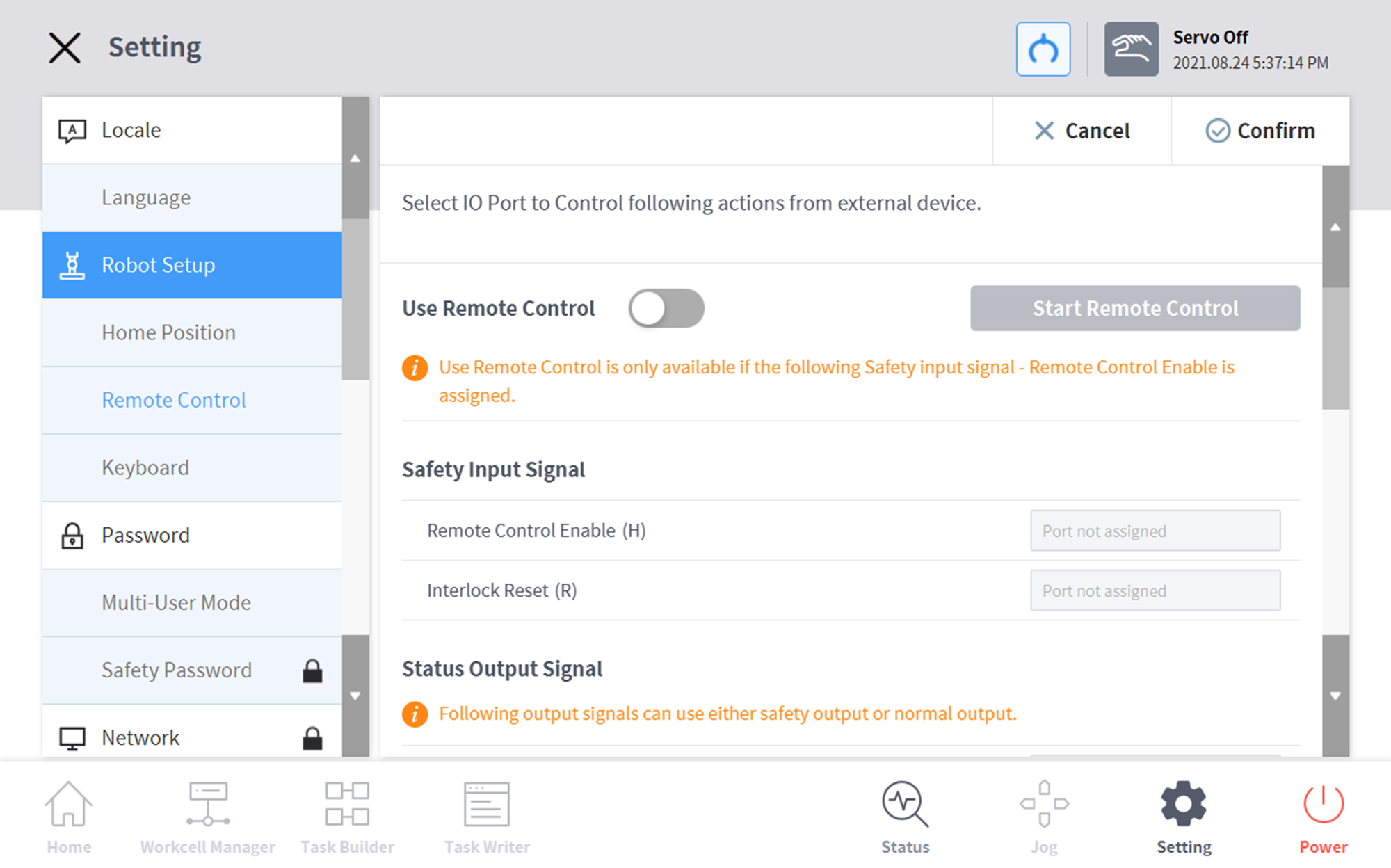
- Sélectionnez le menu Remote Control (Contrôle à distance) dans le menu Setting (Configuration) > Robot Setup (Configuration du robot)
- Les paramètres actuels s'affichent dans la fenêtre de gestion des paramètres.
- Réglez le bouton Use Remote Control (Utilisation du contrôle à distance) sur ON (activé).
- Si le système est redémarré en mode de contrôle à distance activé, l'initialisation a lieu en mode de contrôle à distance.
- Saisissez le signal de sortie, le signal d'entrée et les valeurs de tâche à charger par défaut. .
- Si le signal d'entrée n'est pas défini, les paramètres ne peuvent pas être réglés. Dans Workcell Manager (Gestionnaire des cellules de travail) > Safety I/O (E/S de sécurité) > onglet Input (Entrée), Edit (Modifier), sélectionnez Port et activez l'option Remote Control Enable(H) (Activation du contrôle à distance).
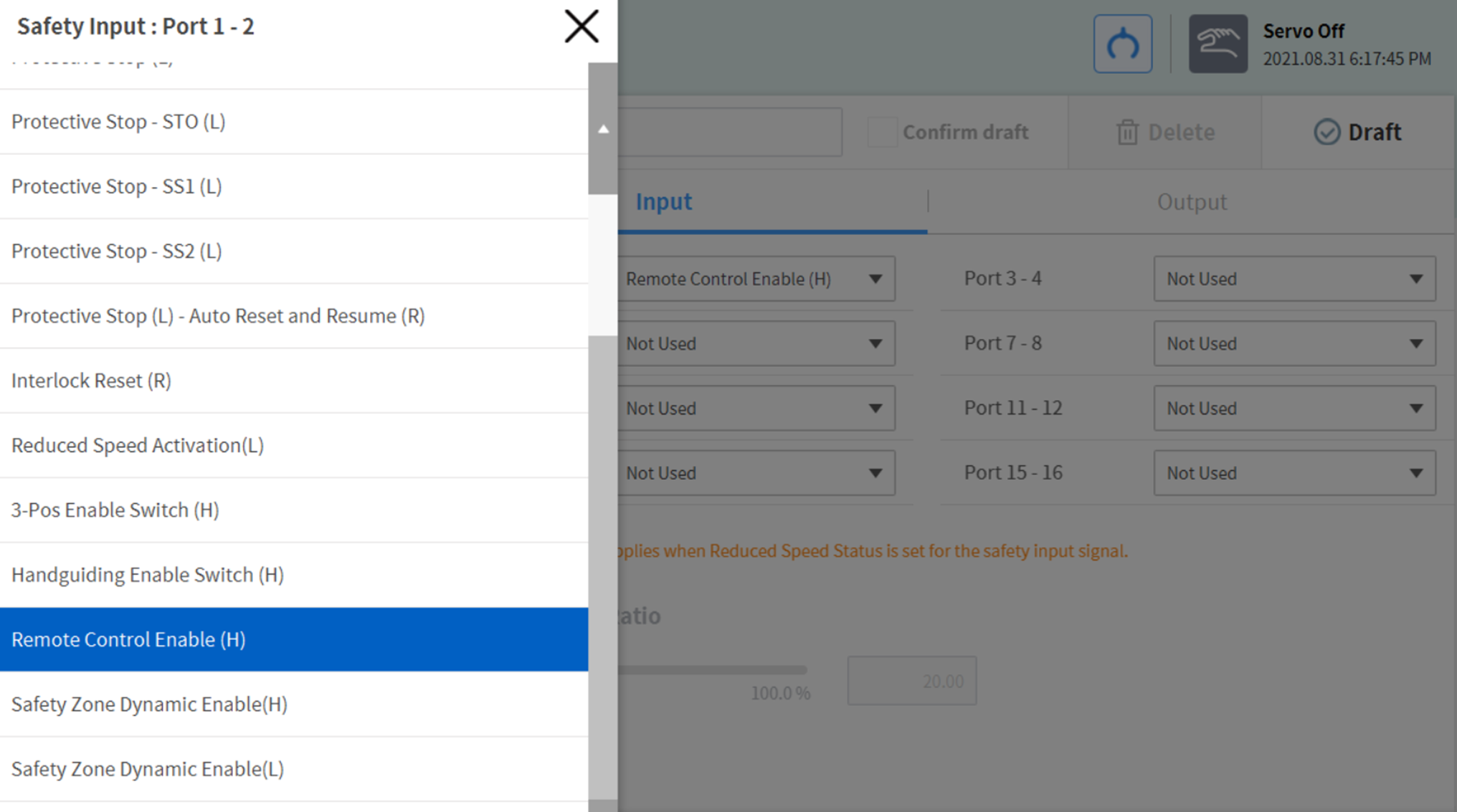
- Si le signal d'entrée n'est pas défini, les paramètres ne peuvent pas être réglés. Dans Workcell Manager (Gestionnaire des cellules de travail) > Safety I/O (E/S de sécurité) > onglet Input (Entrée), Edit (Modifier), sélectionnez Port et activez l'option Remote Control Enable(H) (Activation du contrôle à distance).
- Appuyez sur le bouton Confirm (Confirmer) une fois terminé.
- Cela termine la configuration de l'environnement pour le contrôle à distance.
- Pour permettre le contrôle à distance à l'aide d'un dispositif externe, appuyez sur le bouton Start Remote Control (Lancer le contrôle à distance) pour activer le mode de contrôle à distance.
- Des informations concernant les tâches à exécuter à partir du dispositif externe s'affichent.
- Les entrées de mouvement issues du dispositif externe ne peuvent être exécutées que si un signal vert s'affiche au niveau du bouton « Enable Remote Control » (Activer le contrôle à distance)
- En cas de signal rouge au niveau du bouton « Enable Remote Control » (Activer le contrôle à distance), saisissez un signal d'activation à partir du dispositif externe.
Remarque
- Si un arrêt de sécurité ou un arrêt de protection a lieu en mode de contrôle à distance, il est géré comme suit :
- Arrêt d'urgence : un message contextuel d'arrêt d'urgence s'affiche. Résolvez la cause de l'arrêt d'urgence et tournez ou tirez sur l'interrupteur d'arrêt d'urgence. La fenêtre contextuelle se ferme automatiquement.
- Arrêt de protection entraînant le passage à l'état Servo Off (Servo désactivé) : un message contextuel d'arrêt de protection s'affiche en rouge. Si le signal Servo On (Servo activé) est entré après la suppression de la cause de l'arrêt de protection, le servo du robot s'active et la fenêtre contextuelle se ferme automatiquement.
- Arrêt de protection entraînant le passage à l'état Interrupted (Interrompu) : un message contextuel d'arrêt de protection s'affiche en jaune. Si le signal Interlock Reset (Réinitialisation du verrouillage) est entré après la suppression de la cause de l'arrêt de protection, le robot passe à l'état de veille normal : Manual Standby (Veille manuelle), Auto Standby (Veille auto) ou HGC standby (Veille HGC).
En cas de problèmes de sécurité dont la cause ne peut pas être éliminée sans déplacer le robot, vous pouvez utiliser la fonction Clamping Escape by cockpit (Échappement serrage par le cockpit). - Pour plus de détails sur l'état de chaque mode, veuillez vous reporter à « État et couleur de la LED de la bride pour chaque mode»
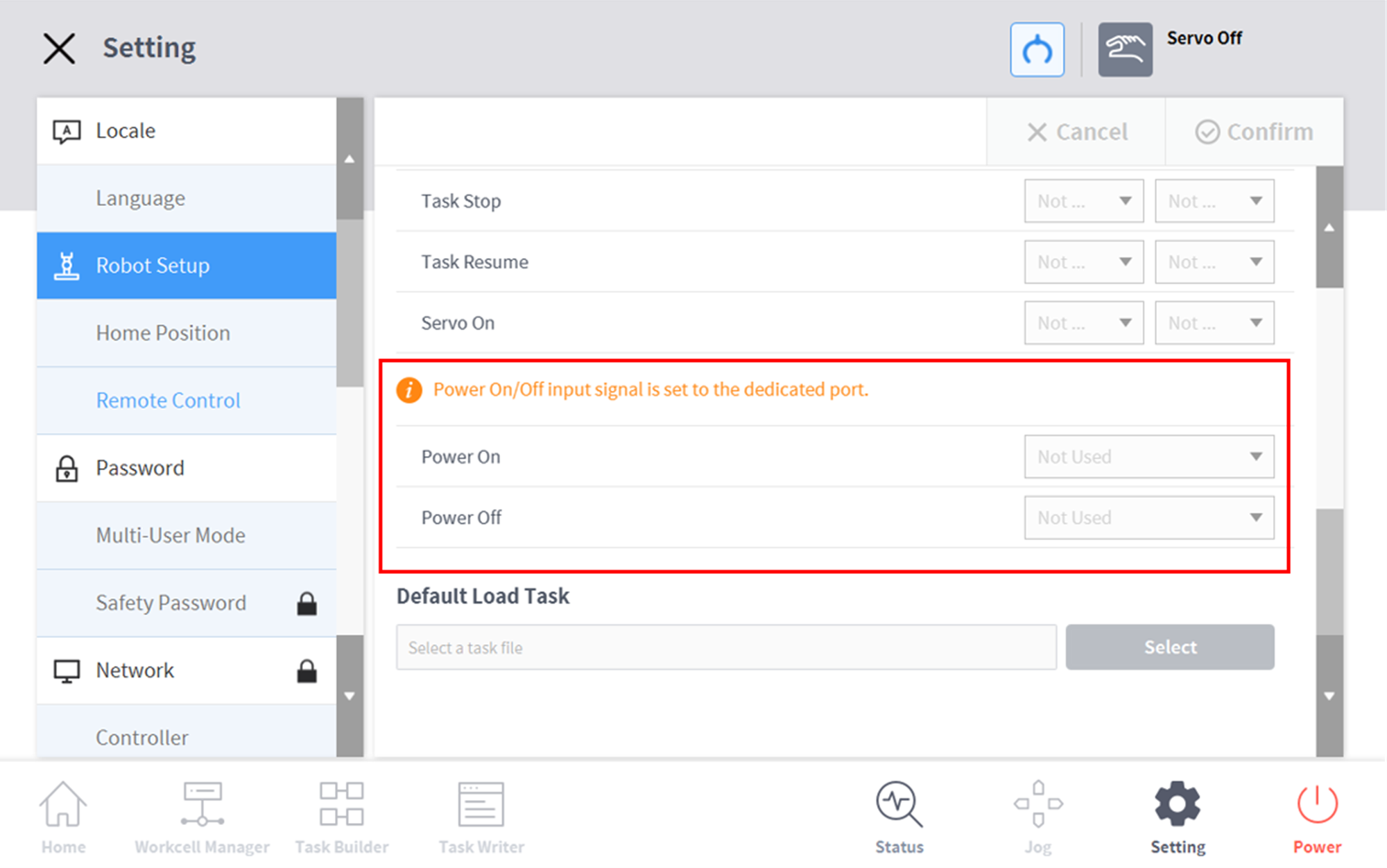
- Il est possible d'activer ou couper l'alimentation du robot grâce au contrôle à distance.
- Appuyez sur le bouton Settings (Paramètres) dans le menu principal et sélectionnez Remote Control (Contrôle à distance) sous Robot settings (Paramètres du robot).
- Sélectionnez le port d'entrée dédié au contrôle à distance pour utiliser les fonctions Power On (Activation de l'alimentation) ou Power Off (Coupure de l'alimentation).