
Paramètres du robot - définir les coordonnées mondiales
FACULTATIF NORMAL 3 MIN
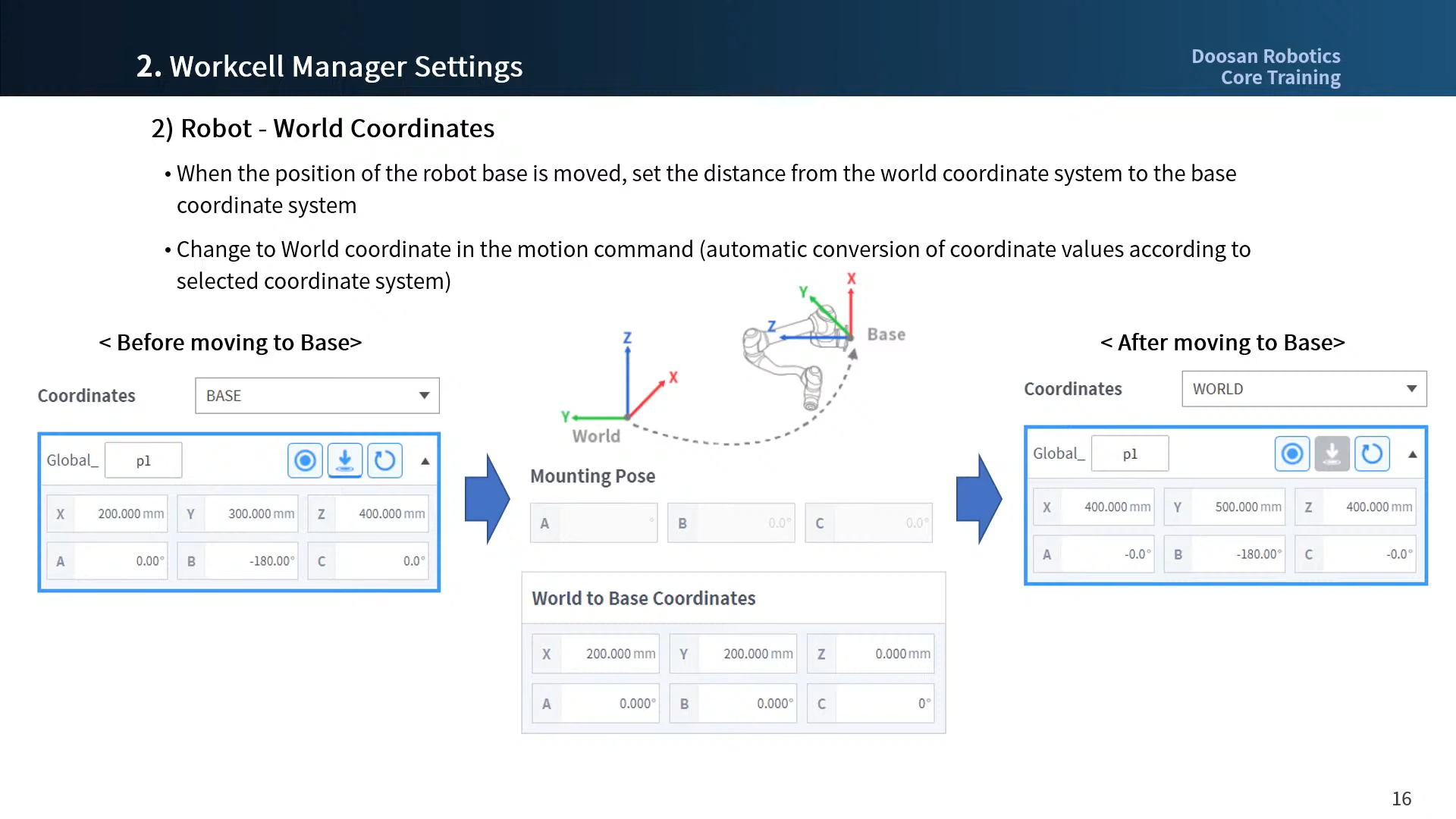
Les coordonnées mondiales du robot peuvent être définies à partir des coordonnées mondiales. Si la coordonnée du robot est la coordonnée de base, cette étape peut être ignorée.
Les coordonnées mondiales peuvent être définies via Gestionnaire de cellules de travail > robot > Coordonnées mondiales. Pour plus d'informations, reportez-vous à la section définir les coordonnées mondiales.
- Les coordonnées mondiales sont utilisées lorsque l'emplacement d'installation de la base du robot est déplacé/pivoté physiquement.
- La modification des coordonnées mondiales applique le même mouvement/rotation à l'écran du simulateur de robot.
Remarque
Les coordonnées mondiales peuvent également être utilisées même après que l'emplacement et l'angle de base ont été modifiés après l'apprentissage du robot. Si les coordonnées des tâches créées par l'apprentissage du robot dans le passé sont modifiées de BASE à MONDE, un décalage correspondant au déplacement/rotation des coordonnées mondiales est appliqué à toutes les coordonnées de mouvement.