
Jog+
L'utilisation de Jog+ vous permet de profiter de la fonction de jog tout en réalisant différentes tâches. Cela peut être utilisé lorsqu'un mouvement précis vers le point cible est requis pendant l'apprentissage du robot.
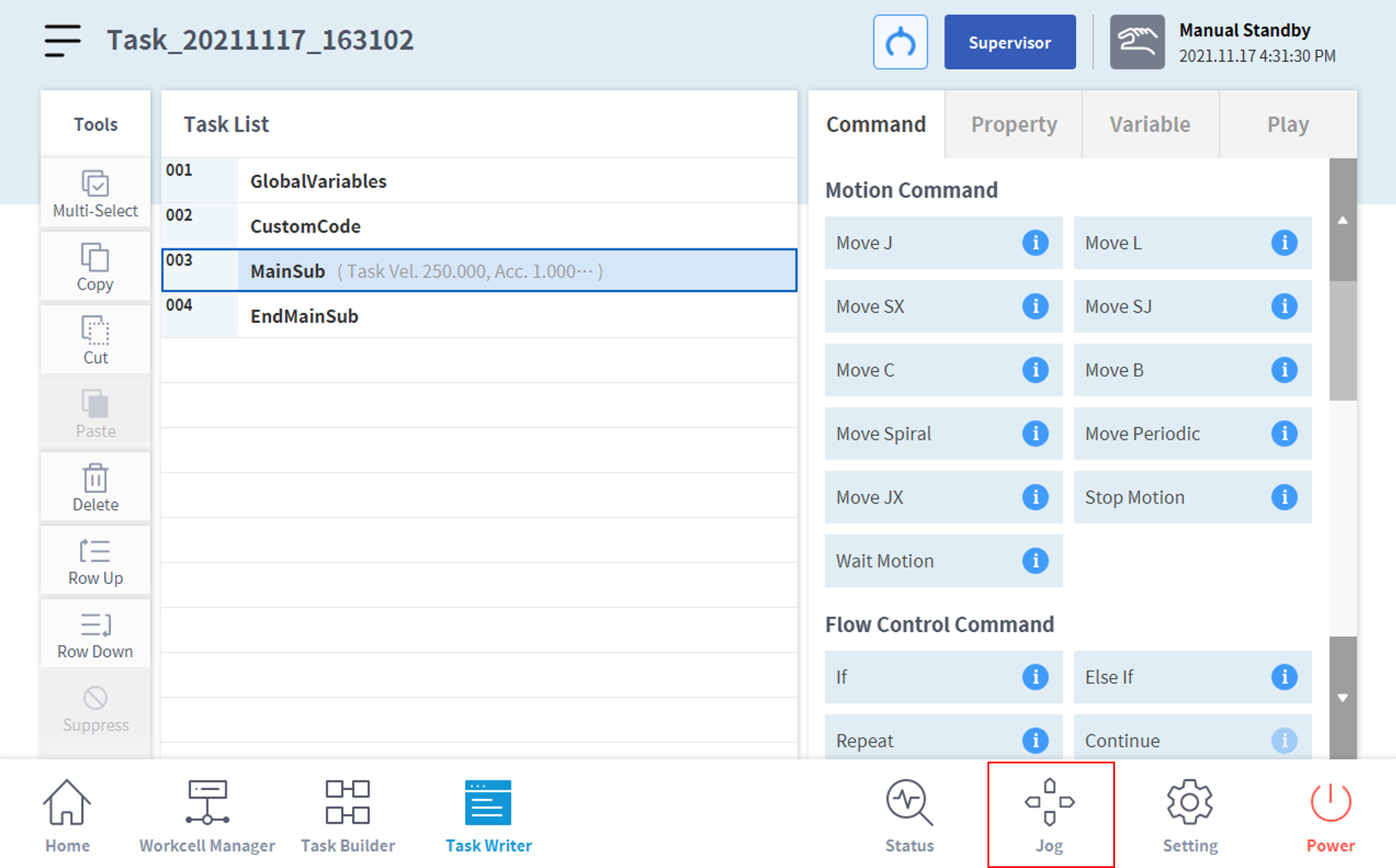
Jog Plus peut être activé des manières suivantes.
- Appuyez sur le bouton jog pendant plus d'une seconde dans le menu principal en bas de l'écran.
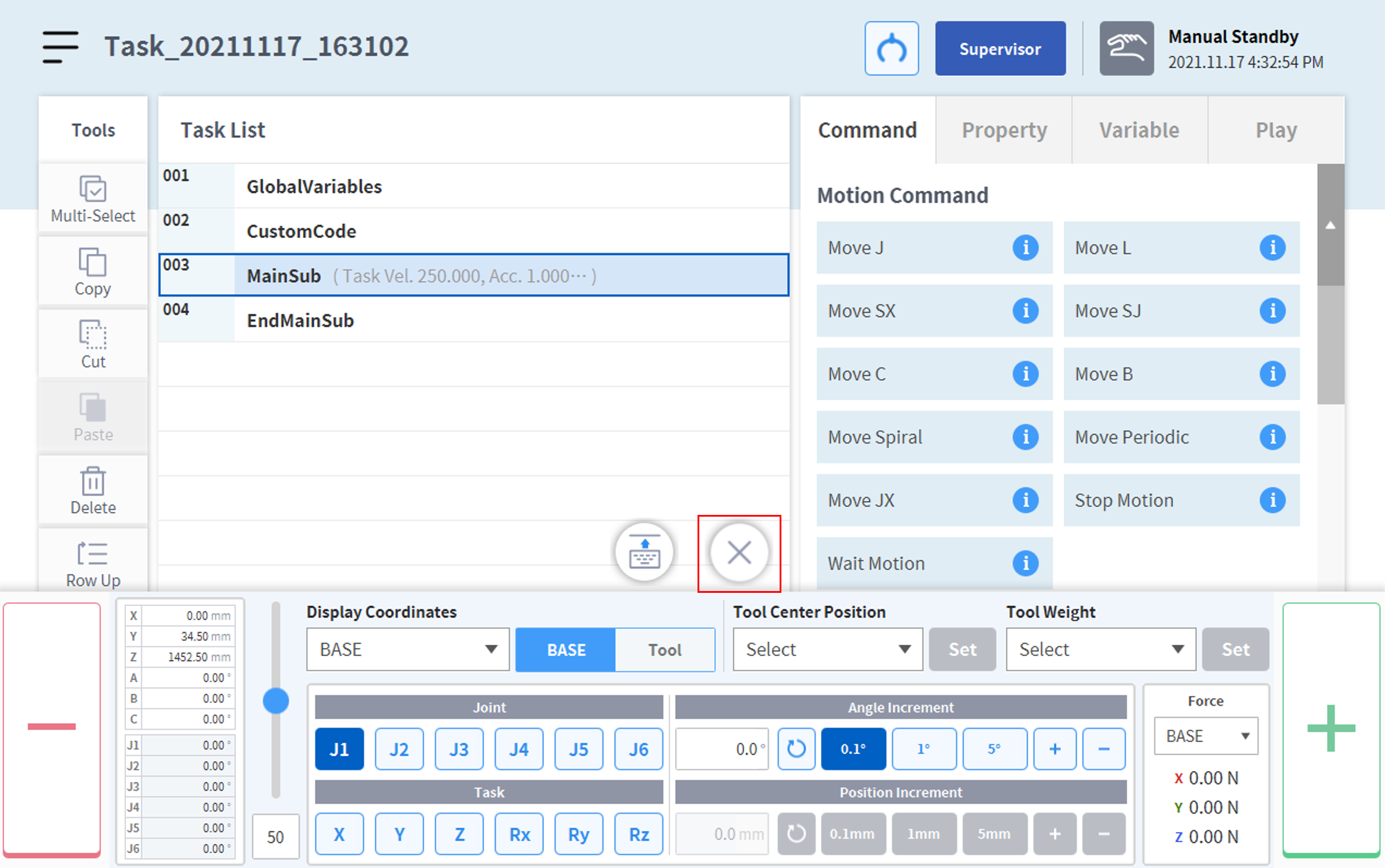
- L'écran Jog Plus est activé.
Jog Plus peut être désactivé en appuyant sur le bouton « X ».
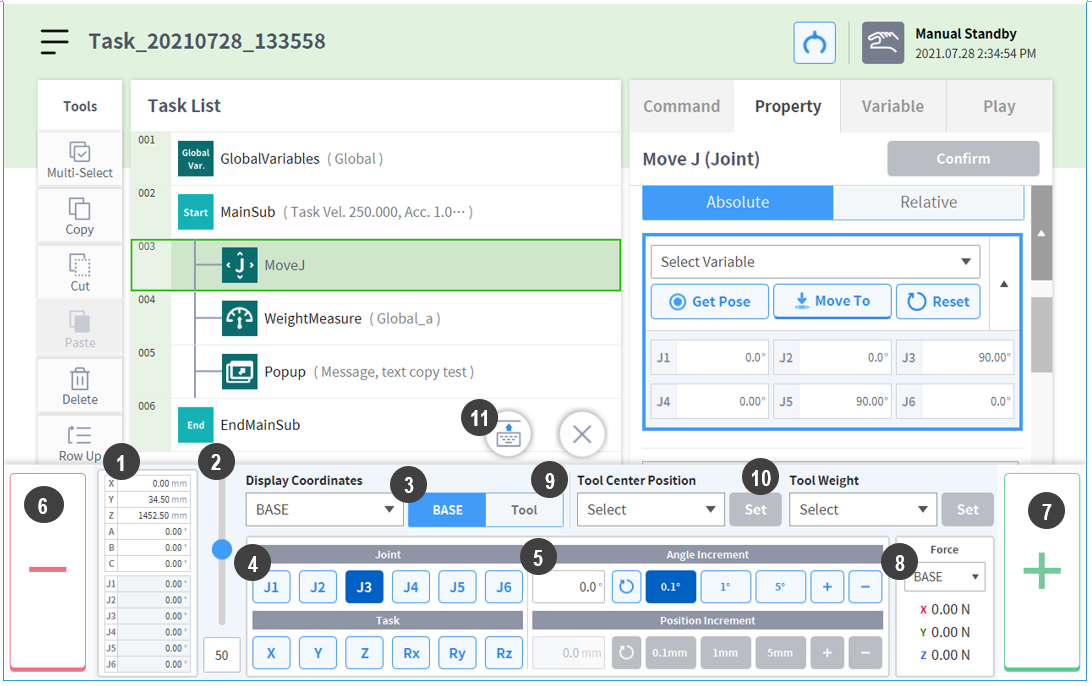
N° | Élément | Description |
|---|---|---|
1 | Current robot pose | Affiche la position du robot sur la base des coordonnées d'affichage définies. |
2 | Manual Mode Speed | Configure la vitesse de mouvement du robot en mode manuel. La vitesse peut être ajustée par glissement du curseur de la barre. Si le curseur de la barre est placé sur 100 %, la vitesse d'articulation maximale sur l'onglet Jog est de 30 deg/s et la vitesse de tâche maximale est de 250 mm/s. Cette vitesse influence la vitesse contrôlée par le bouton Jog et le bouton de mouvement. |
3 | Reference Point Setting | Configuration du point de référence pour l'alignement des coordonnées de la tâche. Base : définition des coordonnées de la tâche en fonction de la base du robot. World (Monde) : règle les coordonnées Monde selon les coordonnées Monde définies. Tool (Outil) : configuration des coordonnées de la tâche en fonction de l'outil installé à l'extrémité des six axes du robot. |
4 | Select Axis | Sélectionne l'axe à déplacer. Onglet Joint (Articulation) : sélection de l'un des axes J1 - J6. Onglet Task (Tâches) : sélection de l'un des axes X à Rz. |
5 | Select Increment | Saisit un nombre correspondant au degré de déplacement de l'axe sélectionné. |
6 | Move – Button | Si le bouton est maintenu enfoncé, l'axe sélectionné est déplacé dans la direction - selon l'incrément de position. |
7 | Move – Button | Si le bouton est maintenu enfoncé, l'axe sélectionné est déplacé dans la direction + selon l'incrément de position. |
8 | Force Monitoring | Affiche la force externe survenant, sur la base du système de coordonnées sélectionné. |
9 | TCP Setting: | Définit la valeur de TTCP. |
10 | Tool Weight Indicator | Règle le poids de l'outil. |
11 | Change Jog+ location | Modifie l'emplacement Jog+ pour correspondre au haut ou au bas de l'écran. |